快拆结构及机器人的制作方法
本申请属于机械结构,更具体地说,是涉及一种快拆结构及机器人。
背景技术:
1、送餐机器人用于酒店或饭店内为客人送餐,送餐机器人上具有用于承载餐盘的托盘,为了适配不用的餐食,需要使用适配于该餐食的托盘,因此需要频繁更换送餐机器人上的托盘,相关技术中,送餐机器人上的托盘和送餐机器人本体之间通过螺栓连接,在送餐机器人的部分位置处,螺栓所处的位置空间较小,导致扳手难以操作,造成螺栓拆卸困难;并且由于频繁拆装,会导致螺栓出现滑牙的情况,需要更换螺栓。
技术实现思路
1、本申请实施例的目的在于提供一种快拆结构及机器人,以解决现有技术中存在的送餐机器人和托盘的连接结构拆装困难且使用寿命较短的技术问题。
2、为实现上述目的,本申请采用的技术方案是:
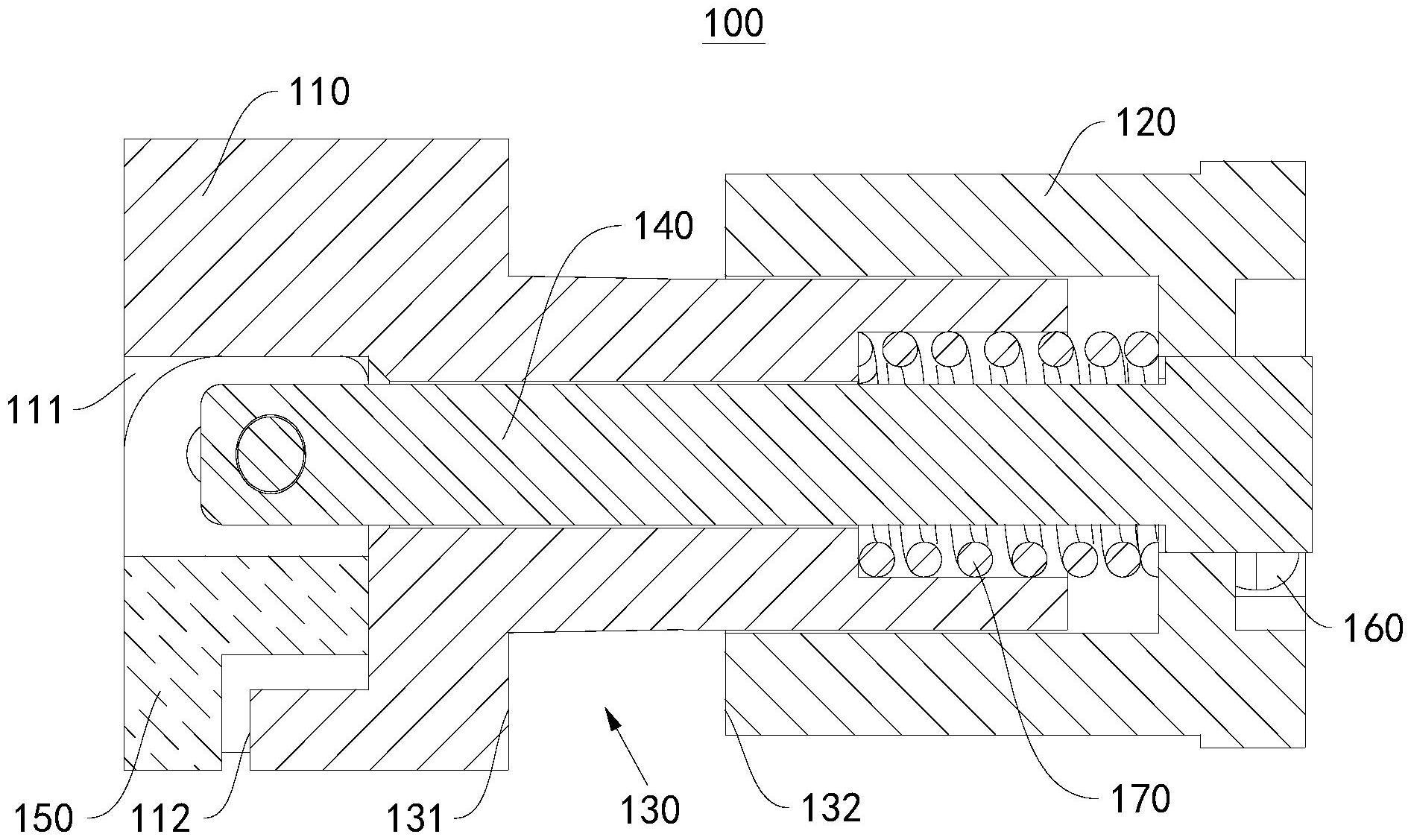
3、提供一种快拆结构,包括:第一限位结构;第二限位结构,和所述第一限位结构相对设置,所述第二限位结构和所述第一限位结构之间形成夹持空间;连接结构,一端用于连接于所述第一限位结构,另一端用于连接于所述第二限位结构;第一锁止结构,连接于所述连接结构和所述第一限位结构,用于限制和开放所述第一限位结构沿第一方向运动;第二锁止结构,连接于所述连接结构和所述第二限位结构,用于限制所述第二限位结构沿所述第一方向的相反方向运动;其中,所述第一方向为所述第一限位结构远离于所述第二限位结构的方向。
4、在一个实施例中,所述第一锁止结构具有第一工作位置和第二工作位置;在所述第一工作位置处,所述第一锁止结构固定连接于所述连接结构,且所述第一锁止结构至少部分处于所述第一限位结构沿所述第一方向运动的路径内;在所述第二工作位置处,所述第一锁止结构全部处于所述第一限位结构沿所述第一方向运动的路径外。
5、在一个实施例中,所述第二锁止结构具有第三工作位置;在所述第三工作位置处,所述第二锁止结构固定连接于所述连接结构,且所述第二锁止结构至少部分处于所述第二限位结构沿所述第一方向的相反方向运动的路径内;
6、所述第二锁止结构还用于开放所述第二限位结构沿所述第一方向的相反方向运动;所述第二锁止结构还具有第四工作位置;在所述第四工作位置处,所述第二锁止结构全部处于所述第二限位结构沿所述第一方向的相反方向运动的路径外。
7、在一个实施例中,所述第一锁止结构固定连接于所述连接结构,所述第一锁止结构由所述连接结构朝向所述第一方向的垂直方向延伸;所述第一限位结构形成第一抵挡面和第一通孔,且所述第一抵挡面和所述第一通孔绕所述第一方向分布;在所述第一工作位置处,所述第一锁止结构至少部分位于所述第一抵挡面沿所述第一方向的运动路径内;在所述第二工作位置处,所述第一锁止结构全部位于所述第一通孔沿所述第一方向的运动路径内。
8、在一个实施例中,所述第一抵挡面为曲面,且所述第一抵挡面朝向所述第一方向凹陷;所述第一锁止结构和所述第一抵挡面相对的面为曲面,且所述第一锁止结构和所述第一抵挡面相对的面朝向所述第一方向凸出。
9、在一个实施例中,所述第一锁止结构转动连接于所述连接结构,且转动方向为第一方向的垂直方向;所述第一限位结构形成第二抵挡面和第二通孔,且所述第二抵挡面位于所述第二通孔的外侧;在所述第一工作位置处,所述第一锁止结构沿所述第一方向的垂直方向延伸,且所述第一锁止结构至少部分位于所述第二抵挡面沿所述第一方向运动的路径内;在所述第二工作位置处,所述第一锁止结构沿所述第一方向延伸,且所述第一锁止结构全部位于所述第二通孔沿所述第一方向运动的路径内。
10、在一个实施例中,所述第二锁止结构固定连接于所述连接结构,所述第二锁止结构由所述连接结构朝向所述第一方向的垂直方向延伸;所述第二限位结构形成第三抵挡面和第三通孔,且所述第三抵挡面和所述第三通孔绕所述第一方向分布;在所述第三工作位置处,所述第二锁止结构至少部分位于所述第三抵挡面沿所述第一方向的相反方向运动的路径内;在所述第四工作位置处,所述第二锁止结构全部位于所述第三通孔沿所述第一方向的相反方向运动的路径内。
11、在一个实施例中,所述第二锁止结构转动连接于所述连接结构,且转动方向为第一方向的垂直方向;所述第二限位结构形成第四抵挡面和第四通孔,且所述第四抵挡面位于所述第四通孔的外侧;在所述第三工作位置处,所述第二锁止结构沿所述第一方向的垂直方向延伸,且所述第二锁止结构至少部分位于所述第四抵挡面沿所述第一方向的相反方向运动的路径内;在所述第四工作位置处,所述第二锁止结构沿所述第一方向的相反方向延伸,且所述第二锁止结构全部位于所述第四通孔沿所述第一方向的相反方向运动的路径内。
12、在一个实施例中,弹性件,一端连接于所述第一限位结构,另一端连接于所述第二限位结构,所述弹性件用于推动所述第一限位结构和所述第二限位结构相互远离。
13、本申请还提供了一种机器人,包括上述的快拆结构,所述机器人包括基座和托盘,所述基座和所述托盘通过所述快拆结构固定连接。
14、本申请提供的快拆结构及机器人的有益效果在于:
15、该快拆结构包括:第一限位结构、第二限位结构、连接结构、第一锁止结构以及第二锁止结构,第一限位结构和第二限位结构相对设置,第一限位结构和第二限位结构之间形成夹持空间;连接结构的一端用于连接于第一限位结构,连接结构的另一端用于连接于第二限位结构;第一锁止结构连接于连接结构和第一限位结构,第一锁止结构用于限制和开放第一限位结构沿第一方向运动;第二锁止结构连接于连接结构和第二限位结构,第二锁止结构用于限制第二限位结构沿第一方向的相反方向运动;其中,第一方向为第一限位结构靠近于第二限位结构的方向。
16、该快拆结构可以应用于将两个具有通孔的目标结构连接,具体的,快拆结构在使用的过程中,首先将第一锁止结构保持于开放第一限位结构沿第一方向运动的状态,此时第一限位结构可以沿第一方向运动以脱离于连接结构,此时可以轻松将连接结构穿过两个目标结构的通孔,并使两个目标结构相互靠近,此时目标结构靠近于第二限位结构,并且在第二锁止结构的作用下,第二限位结构无法沿第一方向的相反方向运动,从而利用第二限位结构可以阻止目标结构沿第一方向的相反方向运动;之后再将第一限位结构连接于连接结构,并将第一锁止结构保持于限制第一限位结构沿第一方向运动的状态,此时第一限位结构无法沿第一方向运动,从而利用第一限位结构可以阻止目标结构沿第一方向运动;因此两个目标结构均被第一限位结构和第二限位结构卡持于夹持空间内,完成了对于两个目标结构进行连接,在该快拆结构设置为多个的情况下,可以实现对两个目标结构进行固定连接。
17、综上,该快拆结构可以快速完成拆装,拆装的过程无需使用螺丝刀且不会发生滑牙的情况。因此可以适应于小空间内对目标结构进行连接,并且具有很长的使用寿命。
技术特征:
1.一种快拆结构,其特征在于,包括:
2.如权利要求1所述的快拆结构,其特征在于,
3.如权利要求2所述的快拆结构,其特征在于,
4.如权利要求2或权利要求3所述的快拆结构,其特征在于,
5.如权利要求4所述的快拆结构,其特征在于,
6.如权利要求2或权利要求3所述的快拆结构,其特征在于,
7.如权利要求3所述的快拆结构,其特征在于,
8.如权利要求3所述的快拆结构,其特征在于,
9.如权利要求1所述的快拆结构,其特征在于,还包括:
10.一种机器人,其特征在于,包括权利要求1-9中任一项所述的快拆结构,所述机器人包括基座和托盘,所述基座和所述托盘通过所述快拆结构固定连接。
技术总结
本申请提供了一种快拆结构及机器人,该快拆结构包括:第一限位结构;第二限位结构,和第一限位结构相对设置,第二限位结构和第一限位结构之间形成夹持空间;连接结构,一端用于连接于第一限位结构,另一端用于连接于第二限位结构;第一锁止结构,连接于连接结构和第一限位结构,用于限制和开放第一限位结构沿第一方向运动;第二锁止结构,连接于连接结构和第二限位结构,用于限制第二限位结构沿第一方向的相反方向运动;其中,第一方向为第一限位结构远离于第二限位结构的方向。该快拆结构可以快速完成拆装,拆装的过程无需使用螺丝刀且不会发生滑牙的情况。因此可以适应于小空间内对目标结构进行连接,并且具有很长的使用寿命。
技术研发人员:刘贤林,唐旋来,李通
受保护的技术使用者:上海擎朗智能科技有限公司
技术研发日:20221229
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!