本技术涉及工业图像采集,尤其涉及一种双目立体视觉采集矫正系统。
背景技术:
1、双目立体视觉是计算机视觉的一个重要分支,即由不同位置的两台相机拍摄同一幅场景,通过计算空间点在两幅图像中的视差,获得该点的三维坐标值。
2、现有的双目立体视觉采集相机的矫正结构较为单一,需要人工手部逐个矫正,手动矫正操作较为繁琐,且矫正效率不高,无法保证快速采集到图像,从而导致工业生产的效率降低。为此,提出一种双目立体视觉采集矫正系统。
技术实现思路
1、本实用新型的目的是为了解决现有技术中双目立体视觉采集相机矫正效率低下的问题,而提出的一种双目立体视觉采集矫正系统。
2、为了实现上述目的,本实用新型采用了如下技术方案:
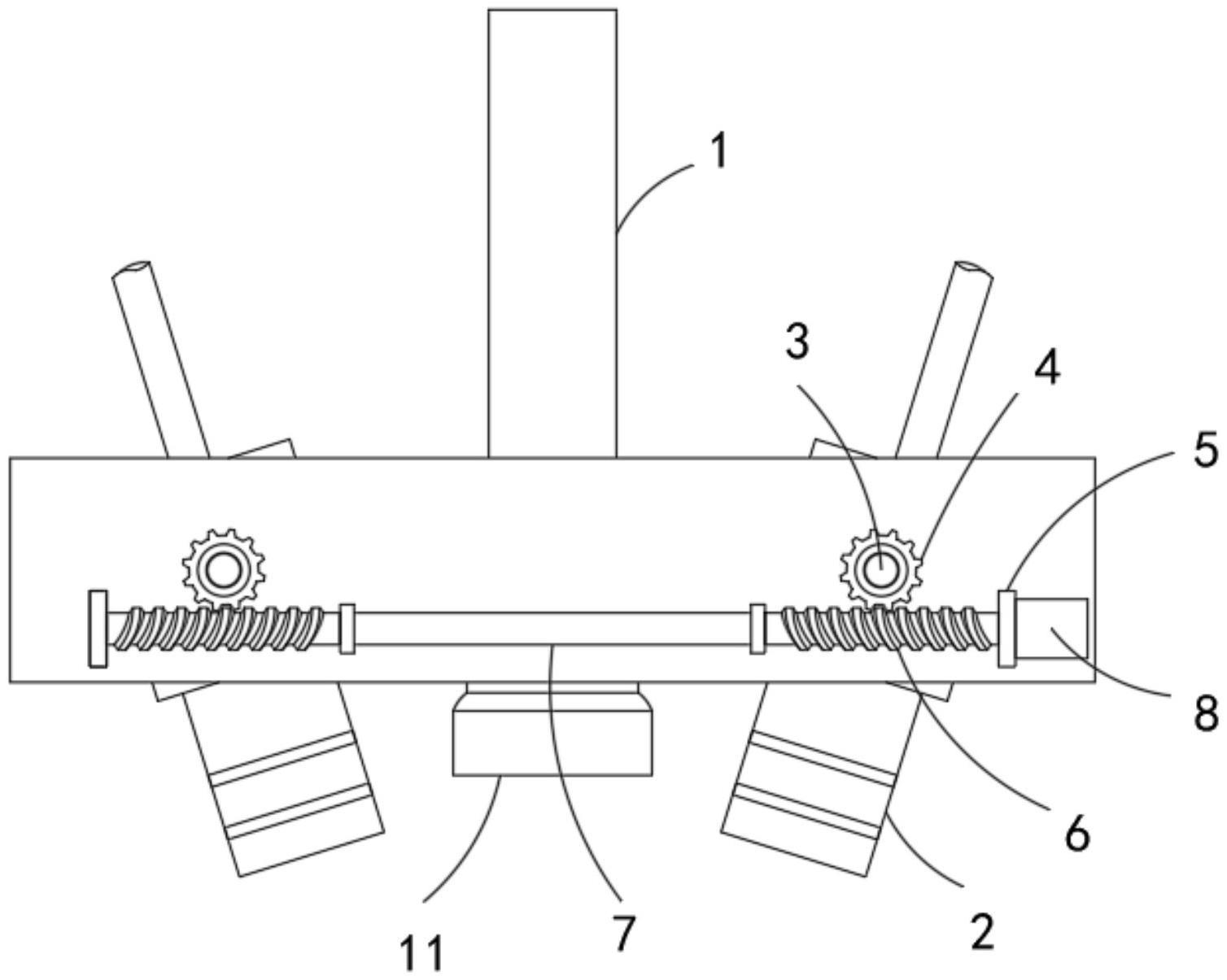
3、一种双目立体视觉采集矫正系统,包括固定架和两个采集相机,两个所述采集相机的外部均固定设有转轴,两个所述转轴远离采集相机的一端与固定架的侧壁转动连接并均固定设有蜗轮,所述固定架的侧壁对称固定设有两个固定座,两个所述固定座相对的一侧均转动设有蜗杆,两个所述蜗杆之间共同固定设有传动杆,两个所述蜗杆分别与两个所述蜗轮啮合设置,所述固定座的侧壁固定设有电机,且电机的输出端与蜗杆的一端固定连接。
4、优选的,所述采集相机的外部套设有固定套,所述固定套的侧壁螺纹设有固定螺栓,且固定螺栓的端部与采集相机相抵设置,所述转轴的一端与固定套的侧壁固定连接。
5、优选的,所述传动杆的两端均固定设有联轴器,所述传动杆的两端均通过联轴器与蜗杆固定连接。
6、优选的,两个所述蜗杆的螺旋方向呈相反设置。
7、优选的,所述固定架的底部且位于两个采集相机之间固定安装有补光源。
8、优选的,所述电机采用减速电机,且电机和采集相机均与控制系统电线连接。
9、与现有技术相比,本实用新型提供了一种双目立体视觉采集矫正系统,具备以下有益效果:
10、1、该双目立体视觉采集矫正系统,通过设有的转轴、蜗轮、固定座、蜗杆、传动杆和电机,控制电机工作,电机能够带动两个蜗杆转动,两个蜗杆能够使得两个蜗轮转动,且两个蜗轮的转动方向是相反的,从而能够使得两个采集相机的角度得到矫正。
11、2、该双目立体视觉采集矫正系统,通过设有的固定套和固定螺栓,采集相机插入在固定套的内部,再通过固定螺栓可将采集相机固定安装,同时也便于将采集相机从固定套的内部拆卸取下。
12、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型能够实现自动矫正的功能,无需人工手动矫正,提高了矫正效率,使得工业生产的效益提升。
技术特征:1.一种双目立体视觉采集矫正系统,包括固定架(1)和两个采集相机(2),其特征在于,两个所述采集相机(2)的外部均固定设有转轴(3),两个所述转轴(3)远离采集相机(2)的一端与固定架(1)的侧壁转动连接并均固定设有蜗轮(4),所述固定架(1)的侧壁对称固定设有两个固定座(5),两个所述固定座(5)相对的一侧均转动设有蜗杆(6),两个所述蜗杆(6)之间共同固定设有传动杆(7),两个所述蜗杆(6)分别与两个所述蜗轮(4)啮合设置,所述固定座(5)的侧壁固定设有电机(8),且电机(8)的输出端与蜗杆(6)的一端固定连接。
2.根据权利要求1所述的一种双目立体视觉采集矫正系统,其特征在于,所述采集相机(2)的外部套设有固定套(9),所述固定套(9)的侧壁螺纹设有固定螺栓(10),且固定螺栓(10)的端部与采集相机(2)相抵设置,所述转轴(3)的一端与固定套(9)的侧壁固定连接。
3.根据权利要求1所述的一种双目立体视觉采集矫正系统,其特征在于,所述传动杆(7)的两端均固定设有联轴器,所述传动杆(7)的两端均通过联轴器与蜗杆(6)固定连接。
4.根据权利要求1所述的一种双目立体视觉采集矫正系统,其特征在于,两个所述蜗杆(6)的螺旋方向呈相反设置。
5.根据权利要求1所述的一种双目立体视觉采集矫正系统,其特征在于,所述固定架(1)的底部且位于两个采集相机(2)之间固定安装有补光源(11)。
6.根据权利要求1所述的一种双目立体视觉采集矫正系统,其特征在于,所述电机(8)采用减速电机,且电机(8)和采集相机(2)均与控制系统电线连接。
技术总结本技术涉及工业图像采集技术领域,且公开了一种双目立体视觉采集矫正系统,包括固定架和两个采集相机,两个所述采集相机的外部均固定设有转轴,两个所述转轴远离采集相机的一端与固定架的侧壁转动连接并均固定设有蜗轮,所述固定架的侧壁对称固定设有两个固定座,两个所述固定座相对的一侧均转动设有蜗杆,两个所述蜗杆之间共同固定设有传动杆,两个所述蜗杆分别与两个所述蜗轮啮合设置,所述固定座的侧壁固定设有电机,且电机的输出端与蜗杆的一端固定连接。本本技术能够实现自动矫正的功能,无需人工手动矫正,提高了矫正效率,使得工业生产的效益提升。
技术研发人员:王捷涛
受保护的技术使用者:无锡捷视智能科技有限公司
技术研发日:20221230
技术公布日:2024/1/13