挡位自学习方法、系统、变速箱、车辆及电子设备与流程
本发明涉及变速箱,尤其涉及一种挡位自学习方法、系统、变速箱、车辆及电子设备。
背景技术:
1、在自动机械式变速箱(amt)的全生命周期中,由于机械加工、安装偏差和工作过程产生的磨损,会导致挡位位置发生改变,因而,针对amt的控制策略需具备学习挡位位置的功能,以保证换挡品质、延长产品使用寿命。
2、目前,针对amt的电动式换挡机构的挡位学习,主要是通过在设置挡位循环,调整换挡电机占空比完成进挡动作的过程中,识别在挡后传感器的电压值来完成自学习。
3、然而,在采用这种挡位学习方法时,需要驱动电机持续输出一定扭矩或配合进挡进行清扭、调速等,以便顺利进挡。因而,会在挡位拨叉带动滑套到达kp位置或到挡位置时,变速箱输出轴仍向后续传动装置输出一定扭矩,进而造成车身出现一定程度的晃动,即使得变速箱装车后进行自学习冲击明显。
技术实现思路
1、本发明提供一种挡位自学习方法、系统、变速箱、车辆及电子设备,用以解决现有技术中因在挡位自学习过程中需要输出端持续输出扭矩,所导致的在变速箱装车后进行挡位自学习时冲击明显的缺陷,实现在挡位自学习时,驱动电机可以适时工作,从而使得学习过程扰动小,且缩短自学习时间的同时,提高学习成功率高。
2、本发明提供一种挡位自学习方法,包括:
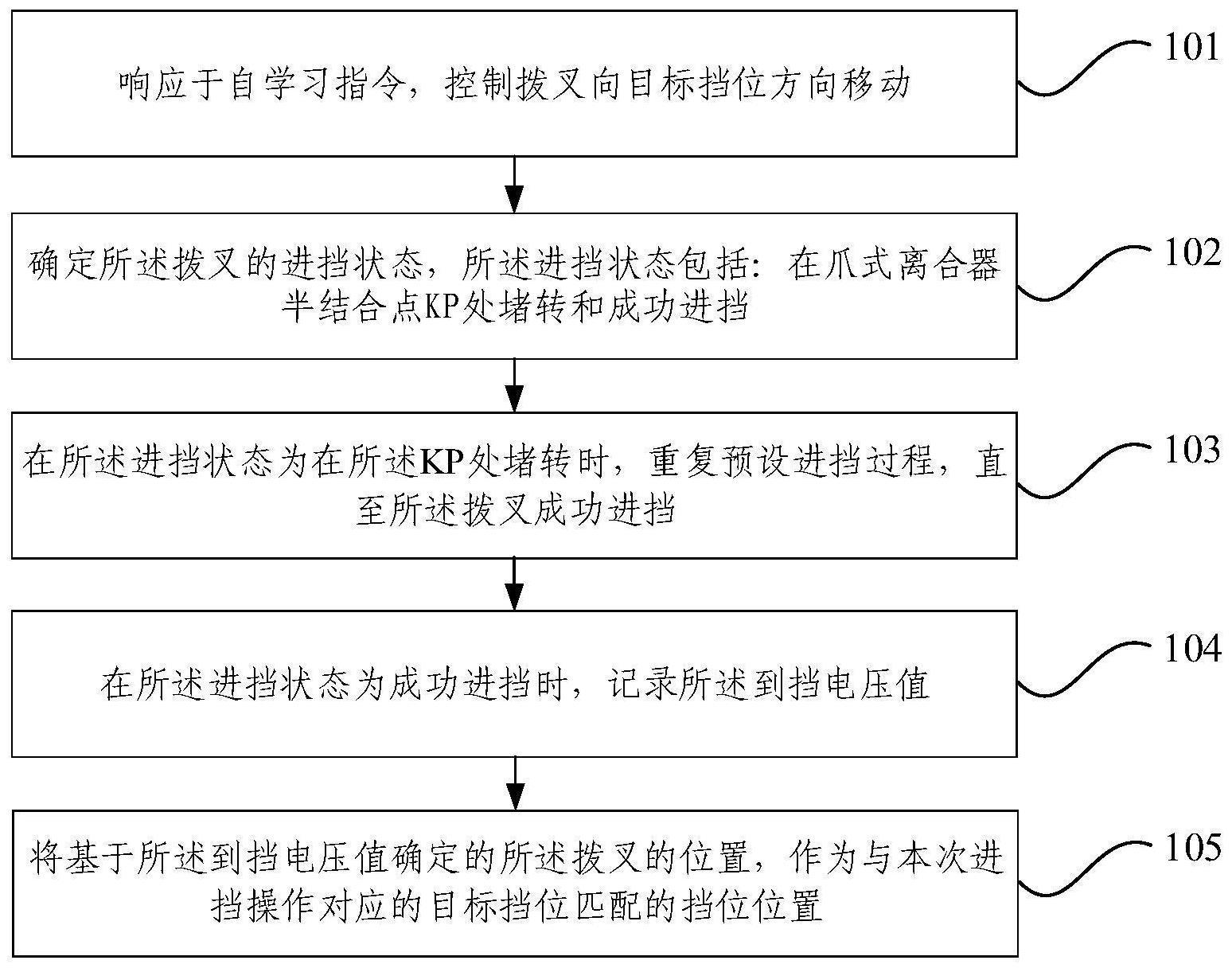
3、响应于自学习指令,控制拨叉向目标挡位方向移动;
4、确定所述拨叉的进挡状态,所述进挡状态包括:在爪式离合器半结合点kp处堵转和成功进挡;
5、在所述进挡状态为在所述kp处堵转时,重复预设进挡过程,直至所述拨叉成功进挡,所述预设进挡过程包括:控制所述拨叉退回零位,并控制驱动电机输出预设扭矩,且所述驱动电机输出所述预设扭矩的持续时长为所述拨叉由所述kp处退回所述零位,并再次到达所述kp处所需的时长与预设时长之和;
6、在所述进挡状态为成功进挡时,记录所述到挡电压值;
7、将基于所述到挡电压值确定的所述拨叉的位置,作为与本次进挡操作对应的目标挡位匹配的挡位位置。
8、根据本发明所述的挡位自学习方法,还包括:
9、针对于每个目标挡位,按照预设次数,控制所述拨叉循环进挡,并记录每次进挡时的所述到挡电压值;
10、将基于所述到挡电压值相加的平均值确定的所述拨叉的位置,作为与对应目标挡位匹配的挡位位置。
11、根据本发明所述的挡位自学习方法,所述在所述进挡状态为成功进挡时,记录所述到挡电压值,包括:
12、在所述进挡状态为成功进挡时,控制换挡电机停止工作;
13、记录所述换挡电机停止工作时的电压值,并作为所述到挡电压值。
14、根据本发明所述的挡位自学习方法,还包括:
15、获取同一所述拨叉进挡至所述拨叉对应的两个所述目标挡位时的所述到挡电压值,并分别作为第一到挡电压值和第二到挡电压值;
16、计算所述第一到挡电压值和所述第二到挡电压值相加的平均值与对应所述零位的预设零位电压值间的差值;
17、确定所述差值是否超出预设零位允许偏差范围;
18、若超出,触发故障警报;
19、若未超出,基于所述差值修正所述零位的位置。
20、根据本发明所述的挡位自学习方法,还包括:
21、基于同一所述拨叉进挡至所述拨叉对应的两个所述目标挡位时的所述到挡电压值,确定两个所述目标挡位间的总行程;
22、确定所述总行程是否超出预设行程允许偏差范围;
23、若超出,触发故障警报;
24、若未超出,执行将基于所述到挡电压值确定的所述拨叉的位置,作为与本次进挡操作对应的目标挡位匹配的挡位位置。
25、本发明还提供一种挡位自学习系统,包括:
26、指令响应模块,用于响应于自学习指令,控制拨叉向目标挡位方向移动;
27、状态确定模块,用于确定所述拨叉的进挡状态,所述进挡状态包括:在爪式离合器半结合点kp处堵转和成功进挡;
28、自学习模块,用于在所述进挡状态为在所述kp处堵转时,重复预设进挡过程,直至所述拨叉成功进挡,以及在所述进挡状态为成功进挡时,记录所述到挡电压值;其中,所述预设进挡过程包括:控制所述拨叉退回零位,并控制驱动电机输出预设扭矩,且所述驱动电机输出所述预设扭矩的持续时长为所述拨叉由所述kp处退回所述零位,并再次到达所述kp处所需的时长与预设时长之和;
29、结果执行模块,用于将基于所述到挡电压值确定的所述拨叉的位置,作为与本次进挡操作对应的目标挡位匹配的挡位位置。
30、本发明还提供一种变速箱,包括变速箱本体,以及角度传感器和如上所述的挡位自学习系统,且所述角度传感器安装在所述变速箱的换挡机构上。
31、本发明还提供一种包括如上所述的变速箱的车辆。
32、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一种所述的挡位自学习方法。
33、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的挡位自学习方法。
34、本发明提供的一种挡位自学习方法、系统、变速箱、车辆及电子设备,在进行挡位自学习时,通过控制拨叉向目标挡位方向移动,然后确定拨叉是否在kp处堵转或成功进挡,且在拨叉在kp处堵转时,通过预设进挡过程,即控制拨叉退回零位,并在拨叉再次进挡前,控制驱动电机输出预设扭矩,以改变滑套与结合齿的齿间相对位置,直至拨叉成功进挡,而在拨叉成功进挡时,记录到挡电压值,并将基于到挡电压值确定的拨叉的位置,作为与本次进挡操作对应的目标挡位匹配的挡位位置,使得在挡位自学习过程中,驱动电机仅需在识别到拨叉在kp处转堵时,才输出扭矩,避免了因在挡位学习过程中,驱动电机需要持续输出扭矩所导致的自学习冲击,使得学习过程扰动小。
技术特征:
1.一种挡位自学习方法,其特征在于,包括:
2.根据权利要求1所述的挡位自学习方法,其特征在于,还包括:
3.根据权利要求1所述的挡位自学习方法,其特征在于,所述在所述进挡状态为成功进挡时,记录所述到挡电压值,包括:
4.根据权利要求1所述的挡位自学习方法,其特征在于,还包括:
5.根据权利要求1所述的挡位自学习方法,其特征在于,还包括:
6.一种挡位自学习系统,其特征在于,包括:
7.一种变速箱,其特征在于,包括变速箱本体,换挡电机、角度传感器以及如权利要求6所述的挡位自学习系统,且所述角度传感器安装在所述变速箱的换挡机构上。
8.一种车辆,其特征在于,包括如权利要求7所述的变速箱。
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至5任一项所述的挡位自学习方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5任一项所述的挡位自学习方法。
技术总结
本发明涉及变速箱技术领域,提供一种挡位自学习方法、系统、变速箱、车辆及电子设备,方法包括:响应于自学习指令,控制拨叉向目标挡位方向移动;确定拨叉的进挡状态;在进挡状态为在KP处堵转时,重复预设进挡过程,直至拨叉成功进挡;在进挡状态为成功进挡时,记录到挡电压值;将基于到挡电压值确定的拨叉的位置,作为与本次进挡操作对应的目标挡位匹配的挡位位置。本发明用以解决现有技术中因在挡位自学习过程中需要输出端持续输出扭矩,所导致的在变速箱装车后进行挡位自学习时冲击明显的缺陷,实现在挡位自学习时,驱动电机可以适时工作,从而使得学习过程扰动小,且缩短自学习时间的同时,提高学习成功率高。
技术研发人员:卞光耀,侯大军,张震北
受保护的技术使用者:索特传动设备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!