一种用于管道检测与维修的模块化蛇形机器人
本发明涉及仿生蛇形机器人,具体为一种用于管道检测与维修的模块化蛇形机器人。
背景技术:
1、机械仿生学以力学或机械学作为基础,综合生物学、医学及工程学等科学技术,根据自然界中某种生物的某些特定结构或功能,创造出有利于人类生产活动的新型设备,它贯穿着研究、模拟生物系统的信息处理、运动技能和系统控制,以及在医学及工程中的应用,并把这些成果根据社会的要求付之实用化。生物蛇因其具有关节灵活、体形修长以及空间行动适应能力强等特点,可以在例如曲折的封闭管道、狭窄的坍塌建筑等各种复杂结构空间区域中自由移动,其仿生结构可应用于消防、救援、管道检测维修以及军事侦察等领域,仿生蛇便由此孕育而生。
2、当前仿生蛇形机器人移动机构主要为履带式移动机构、轮式移动机构以及鳞片式移动机构三种;其关节连接方式分为平行连接、正交连接、万向节连接和p-g(pitch-roll)连接。这些设计结构相对简单、便于控制,同时具有较好的关节灵活性,但仍存在一定的缺陷,例如平行连接的蛇形机器人模块间转动副轴线相互平行导致其只能进行二维运动、正交连接单元只具有两个自由度,相邻关节转向仅限于水平面和竖直面内的摆动,这极大地限制了关节的运动范围和动作丰富程度。
3、同时,传统的管道机器人在使用中也存在一定的缺陷:1.机器人对不同管道内径适应性不足,只针对于固定内径管道;
4、2.不能完成复杂工况的作业,如弯曲管道和不规则管道等;因此,不满足现有的需求,对此提出了一种用于管道检测与维修的模块化蛇形机器人。
技术实现思路
1、本发明的目的在于提供一种用于管道检测与维修的模块化蛇形机器人,根据管道状态选择合适的模块数量进行机器人拼接,拼接的蛇形机器人进入管道后会调整姿态使其呈现螺旋线挤压在管道内径,由于蛇形机器人各转向环的协同作用,使得机器人能够更灵活,更能适应复杂管径及路径管道的工作环境,可以解决现有技术中的问题。
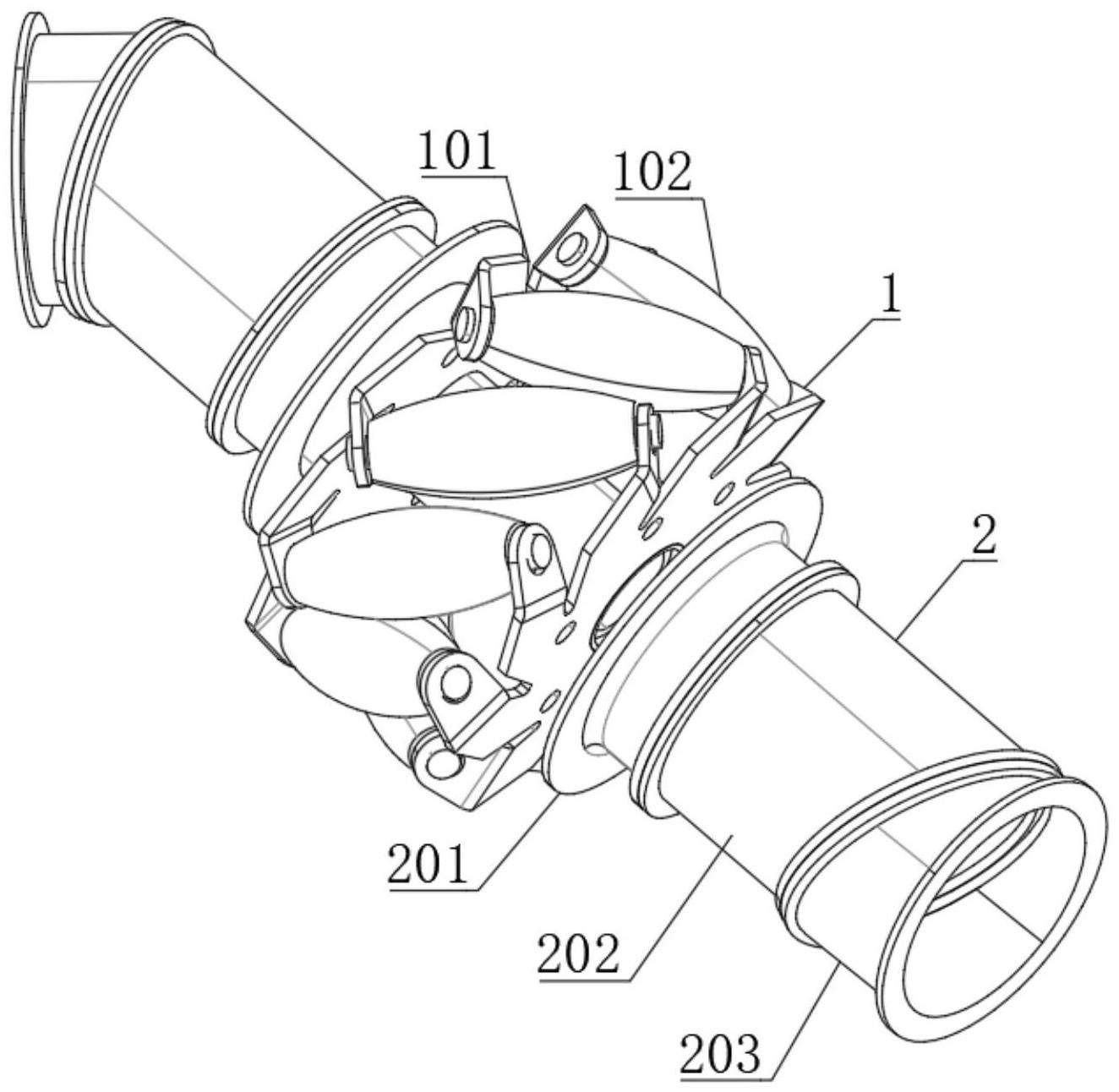
2、为实现上述目的,本发明提供如下技术方案:一种用于管道检测与维修的模块化蛇形机器人,包括转向轴组件和驱动轮组件,所述转向轴组件设置在驱动轮组件的两端,所述驱动轮组件包括飞轮套片和弧形滚轮,弧形滚轮设置在飞轮套片之间,所述转向轴组件包括第一转向环、第二转向环和第三转向环,第二转向环设置在第一转向环与第三转向环之间,所述第一转向环的一端与飞轮套片转动连接,第一转向环的另一端与第二转向环的一端转动连接,所述第二转向环的另一端与第三转向环的一端转动连接。
3、优选的,所述飞轮套片的四周均设置有斜行叶片,斜行叶片与飞轮套片设置为一体式结构,所述弧形滚轮的两端均设置有润滑轴承,弧形滚轮通过润滑轴承与斜行叶片转动连接。
4、优选的,所述弧形滚轮的内部设置有内驱转轴,内驱转轴的两端与飞轮套片转动连接,所述内驱转轴的两端均设置有六轴传感器,六轴传感器与内驱转轴电性连接。
5、优选的,所述第二转向环的一端设置有二转平面接头,第二转向环的另一端设置有二转斜面接头,所述二转斜面接头的内侧设置有从动内齿齿轮,从动内齿齿轮与二转斜面接头固定连接。
6、优选的,所述从动内齿齿轮的内侧设置有驱动齿,驱动齿与从动内齿齿轮啮合转动连接,所述驱动齿的一端设置有转接连轴,转接连轴与驱动齿设置为一体结构。
7、优选的,所述第三转向环的一端设置有三转斜面接头,第三转向环的另一端设置有三转平面接头,所述三转斜面接头与二转斜面接头贴合连接,转接连轴与第三转向环连接。
8、优选的,所述三转平面接头的外表面设置有电讯号触点,电讯号触点与第三转向环电性连接,所述电讯号触点的外侧设置有卡槽,卡槽的内部设置有卡簧。
9、优选的,所述电讯号触点的上方设置有对准标记,所述蛇形机器人之间通过第三转向环连接,第三转向环之间通过卡簧与卡槽咬合旋转固定。
10、与现有技术相比,本发明的有益效果是:
11、1、本发明,根据管道状态选择合适的模块数量进行机器人拼接,拼接的蛇形机器人进入管道后会调整姿态使其呈现螺旋线挤压在管道内径,与驱动轮相连的六轴传感器将驱动轮组件受到的力进行采集,并由中控系统汇总分析整体受力状态,从而对转向环驱动扭矩进行控制,保证机器人在管道内的运行姿态,由于蛇形机器人各转向环的协同作用,使得机器人能够更灵活,更能适应复杂管径及路径管道的工作环境;
12、2、本发明,两组机器人模块则通过两端的第三转向环进行连接,在三转平面接头的外表面设置有电讯号触点,而电讯号触点的外侧设置有卡槽,卡槽的内部设置有卡簧,将相邻模块的第三转向环按照对准标记对齐后卡头,旋转完成模块拼接,卡簧对插入后的卡头进行固定,相邻模块电讯号触点接触后两模块可进行信号通讯,通过两模块各转向环转动协作可以对蛇形机器人姿态进行调整;
13、3、本发明,第二转向环和第三转向环的一端均为平面接口结构,而另一端则是斜面接口结构,其中,二转斜面接头的内侧设置有从动内齿齿轮,在从动内齿齿轮安装有一组可实现啮合转动的驱动齿,驱动齿与从动内齿齿轮啮合转动连接,在组接的过程中三转斜面接头与二转斜面接头可以进行组装贴合,这样在进行转动调节的过程中,第二转向环与第三转向环之间便可以沿着斜面进行旋转,从而实现曲线路径的调节。
技术特征:
1.一种用于管道检测与维修的模块化蛇形机器人,包括转向轴组件(2)和驱动轮组件(1),其特征在于:所述转向轴组件(2)设置在驱动轮组件(1)的两端,所述驱动轮组件(1)包括飞轮套片(101)和弧形滚轮(102),弧形滚轮(102)设置在飞轮套片(101)之间,所述转向轴组件(2)包括第一转向环(201)、第二转向环(202)和第三转向环(203),第二转向环(202)设置在第一转向环(201)与第三转向环(203)之间,所述第一转向环(201)的一端与飞轮套片(101)转动连接,第一转向环(201)的另一端与第二转向环(202)的一端转动连接,所述第二转向环(202)的另一端与第三转向环(203)的一端转动连接。
2.根据权利要求1所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述飞轮套片(101)的四周均设置有斜行叶片(1011),斜行叶片(1011)与飞轮套片(101)设置为一体式结构,所述弧形滚轮(102)的两端均设置有润滑轴承(1021),弧形滚轮(102)通过润滑轴承(1021)与斜行叶片(1011)转动连接。
3.根据权利要求2所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述弧形滚轮(102)的内部设置有内驱转轴(104),内驱转轴(104)的两端与飞轮套片(101)转动连接,所述内驱转轴(104)的两端均设置有六轴传感器(103),六轴传感器(103)与内驱转轴(104)电性连接。
4.根据权利要求1所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述第二转向环(202)的一端设置有二转平面接头(2021),第二转向环(202)的另一端设置有二转斜面接头(2022),所述二转斜面接头(2022)的内侧设置有从动内齿齿轮(2023),从动内齿齿轮(2023)与二转斜面接头(2022)固定连接。
5.根据权利要求4所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述从动内齿齿轮(2023)的内侧设置有驱动齿(2024),驱动齿(2024)与从动内齿齿轮(2023)啮合转动连接,所述驱动齿(2024)的一端设置有转接连轴(2025),转接连轴(2025)与驱动齿(2024)设置为一体结构。
6.根据权利要求5所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述第三转向环(203)的一端设置有三转斜面接头(2031),第三转向环(203)的另一端设置有三转平面接头(2032),所述三转斜面接头(2031)与二转斜面接头(2022)贴合连接,转接连轴(2025)与第三转向环(203)连接。
7.根据权利要求6所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述三转平面接头(2032)的外表面设置有电讯号触点(2035),电讯号触点(2035)与第三转向环(203)电性连接,所述电讯号触点(2035)的外侧设置有卡槽(2036),卡槽(2036)的内部设置有卡簧(2034)。
8.根据权利要求7所述的一种用于管道检测与维修的模块化蛇形机器人,其特征在于:所述电讯号触点(2035)的上方设置有对准标记(2033),所述蛇形机器人之间通过第三转向环(203)连接,第三转向环(203)之间通过卡簧(2034)与卡槽(2036)咬合旋转固定。
技术总结
本发明公开了一种用于管道检测与维修的模块化蛇形机器人,属于仿生蛇形机器人技术领域。一种用于管道检测与维修的模块化蛇形机器人,包括转向轴组件和驱动轮组件,所述转向轴组件设置在驱动轮组件的两端,所述驱动轮组件包括飞轮套片和弧形滚轮,弧形滚轮设置在飞轮套片之间。为解决机器人对不同管道内径适应性不足,只针对于固定内径管道,以及不能完成复杂工况的作业,如弯曲管道和不规则管道等的问题,根据管道状态选择合适的模块数量进行机器人拼接,拼接的蛇形机器人进入管道后会调整姿态使其呈现螺旋线挤压在管道内径,由于蛇形机器人各转向环的协同作用,使得机器人能够更灵活,更能适应复杂管径及路径管道的工作环境。
技术研发人员:谭坦,蔡文竹,曹现雷,佘慧莉,蒋育红
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!