谐波齿轮装置和工业机器人的制作方法
本发明涉及谐波齿轮装置和工业机器人。
背景技术:
1、谐波齿轮装置具备:内齿轮;外齿轮,其与内齿轮局部地啮合,具有弹性;以及谐波发生器,其与外齿轮的内周面接触。谐波发生器使内齿轮与外齿轮之间的啮合位置在绕旋转轴线的周向上移动。谐波发生器具备:凸轮,其具有外周面;和轴承,其配置到外齿轮的内周面与凸轮的外周面之间。凸轮的外周面是具有长轴和短轴的椭圆形状。作为轴承,使用例如深沟球轴承。这样的轴承具备:外圈;内圈;滚动体,其配置于外圈与内圈之间;以及保持器,其保持滚动体。
2、若使上述的谐波齿轮装置驱动,则由于外齿轮的弹性变形而对谐波发生器产生推力。若由于该推力而谐波发生器在旋转轴线方向上移动,则存在内齿轮与外齿轮不恰当地啮合的可能性。存在对轴承的载荷变得过大而使轴承破损的可能性。若为了防止谐波发生器的旋转轴线方向上的移动而要限制例如凸轮的旋转轴线方向上的移动,则轴承相对于凸轮移动。因此,公开了向凸轮与轴承之间涂敷粘接剂而提高凸轮与轴承之间的粘接强度的技术。也公开了设置有在产生了推力的情况下限制保持器从轴承飞出的凸缘的技术。
3、现有技术文献
4、专利文献
5、专利文献1:国际公开第2020/044524号
技术实现思路
1、发明要解决的问题
2、然而,在上述的现有技术中存在如下问题:由于油分、异物等的进入,难以满足凸轮与轴承之间的粘接强度。
3、若设置限制保持器从轴承的飞出的凸缘,则存在不仅阻碍轴承的润滑性、还压扁保持器而使轴承损伤的可能性。
4、本发明提供能够限制轴承的旋转轴线方向上的移动、并防止轴承的损伤的谐波齿轮装置和工业机器人。
5、用于解决问题的方案
6、本发明的一技术方案的谐波齿轮装置具备:内齿轮;外齿轮,其配置到所述内齿轮的径向上的内侧,具有弹性;以及谐波发生器,其与所述外齿轮的内周面接触,所述外齿轮与所述内齿轮局部地啮合而绕旋转轴线相对于所述内齿轮相对旋转,所述谐波发生器使所述内齿轮与所述外齿轮之间的啮合位置在绕所述旋转轴线的周向上移动,所述谐波发生器具备:凸轮,其具有非圆形的外周面;和轴承,其配置于所述外齿轮的所述内周面与所述凸轮的所述外周面之间,所述轴承具备:外圈,其与所述外齿轮的所述内周面接触;内圈,其与所述凸轮的所述外周面接触;多个滚动体,其配置于所述外圈与所述内圈之间;以及保持器,其保持所述多个滚动体,所述谐波齿轮装置具备限制部,所述限制部以避免该限制部与所述保持器之间的接触的方式设置,所述限制部用于限制所述轴承的所述旋转轴线方向上的移动。
7、通过如此构成,能够利用限制部避免该限制部与保持器之间的接触,并且限制轴承的旋转轴线方向上的移动。因此,能够限制轴承的旋转轴线方向上的移动,防止轴承的损伤。
8、在上述结构中,也可以是,所述限制部形成为相对于所述凸轮的所述外周面向径向上的外侧伸出的凸缘状,所述限制部的径向上的外侧端在径向上隔着间隙与所述保持器相对。
9、在上述结构中,也可以是,所述凸轮的所述外周面从所述旋转轴线方向看来形成为具有长轴和短轴的椭圆形状或长圆形状,所述限制部设置于至少所述短轴上。
10、在上述结构中,也可以是,所述限制部从所述旋转轴线方向看来形成为圆形状,在将所述凸轮的所述短轴的长度定义为d1、将所述内圈的壁厚定义为t、将所述限制部的直径定义为φd时,满足
11、d1=d1+2×t
12、d1≥φd>d1。
13、在上述结构中,也可以是,所述限制部从所述旋转轴线方向看来形成为圆形状,在将所述凸轮的所述长轴的长度定义为d2、将所述内圈的壁厚定义为t、将所述限制部的直径定义为φd时,满足
14、d2=d2+2×t
15、φd≤d2。
16、在上述结构中,也可以是,所述限制部与所述凸轮成形为一体。
17、本发明的另一技术方案的谐波齿轮装置具备:内齿轮;外齿轮,其配置到所述内齿轮的径向上的内侧,具有弹性;以及谐波发生器,其与所述外齿轮的内周面接触,所述外齿轮与所述内齿轮局部地啮合而绕旋转轴线相对于所述内齿轮相对旋转,所述谐波发生器使所述内齿轮与所述外齿轮之间的啮合位置在绕所述旋转轴线的周向上移动,所述谐波发生器具备:凸轮,其具有外周面;轴承,其配置于所述外齿轮的所述内周面与所述凸轮的所述外周面之间;以及限制部,其是相对于所述凸轮的所述外周面向径向上的外侧伸出的凸缘状,并且,从所述旋转轴线方向看来形成为圆形状,所述轴承具备:外圈,其与所述外齿轮的所述内周面接触;内圈,其与所述凸轮的所述外周面接触;多个滚动体,其配置于所述外圈与所述内圈之间;以及保持器,其保持所述多个滚动体,所述凸轮的所述外周面从所述旋转轴线方向看来形成为具有长轴和短轴的椭圆形状或长圆形状,对于所述限制部,所述限制部用于限制所述轴承的所述旋转轴线方向上的移动,在将所述凸轮的所述短轴的长度定义为d1、将所述内圈的壁厚定义为t、将所述限制部的直径定义为φd时,满足
18、d1=d1+2×t
19、d1≥φd>d1。
20、通过如此构成,能够利用限制部可靠地避免该限制部与保持器之间的接触,并且可靠地限制轴承的旋转轴线方向上的移动。因此,能够可靠地限制轴承的旋转轴线方向上的移动,并能够可靠地防止轴承的损伤。能够将限制部设为简单的构造。
21、本发明的另一技术方案的工业机器人具备:动力产生部,其产生旋转力;谐波齿轮装置,其具有输入部和输出部;以及对象构件,其安装于所述谐波齿轮装置的所述输出部,所述输入部供所述动力产生部的所述旋转力输入,所述输出部使所述输入部的旋转变速而输出,所述谐波齿轮装置具备:内齿轮;外齿轮,其配置到所述内齿轮的径向上的内侧,具有弹性;以及谐波发生器,其与所述外齿轮的内周面接触,所述外齿轮与所述内齿轮局部地啮合而绕旋转轴线相对于所述内齿轮相对旋转,所述谐波发生器使所述内齿轮与所述外齿轮之间的啮合位置在绕所述旋转轴线的周向上移动,所述外齿轮作为所述输入部和所述输出部中的一者发挥功能,所述谐波发生器具备:凸轮,其具有非圆形的外周面;和轴承,其配置于所述外齿轮的所述内周面与所述凸轮的所述外周面之间,所述凸轮作为所述输入部和所述输出部中的另一者发挥功能,所述轴承具备:外圈,其与所述外齿轮的所述内周面接触;内圈,其与所述凸轮的所述外周面接触;多个滚动体,其配置于所述外圈与所述内圈之间;以及保持器,其保持所述多个滚动体,所述工业机器人具备限制部,所述限制部以避免该限制部与所述保持器之间的接触的方式设置,所述限制部用于限制所述轴承的所述旋转轴线方向上的移动。
22、通过如此构成,能够提供一种限制轴承的旋转轴线方向上的移动、并防止轴承的损伤的工业机器人。
23、发明的效果
24、上述的谐波齿轮装置和工业机器人能够限制轴承的旋转轴线方向上的移动,并防止轴承的损伤。
技术特征:
1.一种谐波齿轮装置,其中,
2.根据权利要求1所述的谐波齿轮装置,其中,
3.根据权利要求2所述的谐波齿轮装置,其中,
4.根据权利要求3所述的谐波齿轮装置,其中,
5.根据权利要求3所述的谐波齿轮装置,其中,
6.根据权利要求1~4中任一项所述的谐波齿轮装置,其中,
7.一种谐波齿轮装置,其中,
8.一种工业机器人,其中,
技术总结
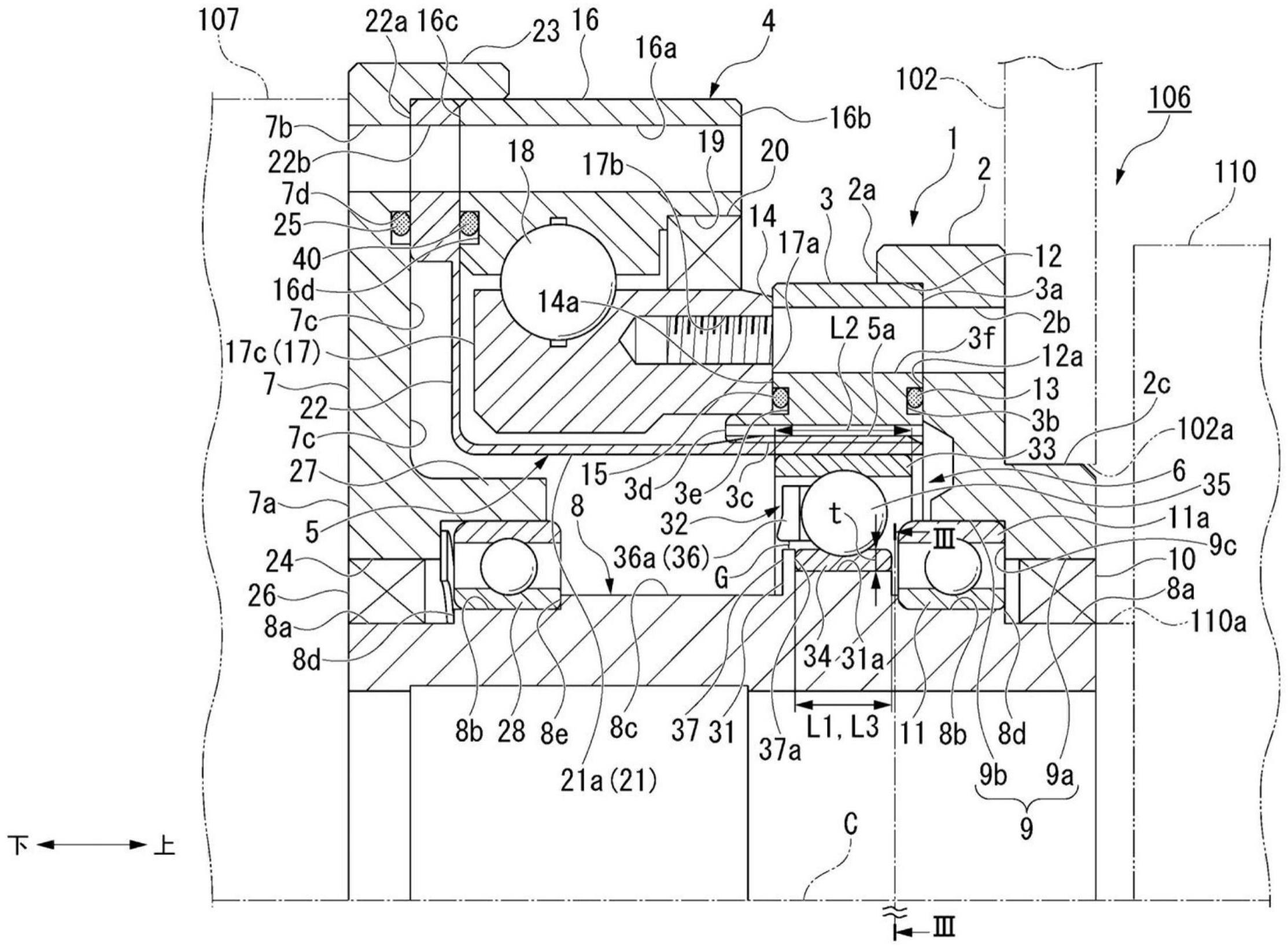
本发明提供谐波齿轮装置和工业机器人。本发明的一形态的谐波齿轮装置具备内齿轮(3)、外齿轮(5)以及谐波发生器(6)。谐波发生器(6)具备:凸轮(31),其具有非圆形的外周面(31a);和第4轴承(32),其配置于外齿轮(5)的内周面(21a)与凸轮31的外周面(31a)之间。第4轴承32具备外圈(33)、内圈(34)、多个球体(35)以及保持器(36)。该谐波齿轮装置具备限制部(37),该限制部(37)以避免该限制部(37)与保持器36之间的接触的方式设置,用于限制第4轴承(32)的旋转轴线(C)方向上的移动。
技术研发人员:和中雄大
受保护的技术使用者:纳博特斯克有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!