一种磁悬浮系统及其双闭环自抗扰控制器、控制方法
本发明属于磁悬浮系统,特别涉及一种磁悬浮系统及其双闭环自抗扰控制器、控制方法。
背景技术:
1、磁悬浮轴承,通过控制电磁力将磁悬浮转子悬浮于定子中心位置,由于其具有无接触无摩擦且不需要润滑的特点,在高速、航空航天、医疗等领域受到了广泛的关注,发挥着重要的作用。
2、对主动式磁悬浮轴承而言,需要布置电磁线圈来产生电磁力以实现对磁悬浮转子的位置控制,因此,采用合适的电磁力控制方法对磁悬浮轴承在磁悬浮系统中发挥其性能有重要的意义,而针对磁悬浮轴承系统结构设计方案以及控制策略成为了研究的热点问题。
3、目前,常用的磁悬浮轴承系统控制方法主要来自于经典控制理论和现代控制理论两大部分。经典控制理论所提出的pid控制方法不依赖被控对象的模型,在大多数场合发挥着重要的作用,但是由于磁悬浮系统的非线性、不稳定等特点,使得传统的pid控制不能取得较好的控制效果;而现代控制理论所提出的控制方法却过于依赖被控对象的模型,在磁悬浮系统中,由于其非线性、磁路之间互相耦合的特点,系统模型难以建立,导致现代控制方法也难以实际使用于磁悬浮系统。
4、专利cn202210810247.4提出了一种磁悬浮系统及其控制方法,该专利通过给定特定的激励信号作用于磁悬浮转子,然后获取磁悬浮轴承的电磁参数和转子的位置参数,并最终确定转子的数学模型。但是由于磁悬浮系统非线性、不稳定等系统特点,导致转子数学模型难以准确获得,而且该方法的实现需要较高的算力支持,对整个系统的硬件条件提出了较高的要求,难以真正的运用于实际场合。
5、专利cn202210265772.2提出了一种基于扰动到状态系统响应的磁悬浮系统控制方法,但是该方法利用系统的线性模型,导致模型不够准确,而对噪声扰动的估计基于其统计特性,而在实际工作状态下,噪声的产生难以估计,这将使得该方法在实际的情况中很难使用。
6、专利cn201710839078.6提出了一种磁悬浮系统的非线性反步控制器的仿真控制方法,利用磁悬浮系统的数学模型和李雅普诺夫稳定性设计非线性控制器,虽然磁悬浮系统为非线性系统,但是非线性控制器设计方法复杂,并且过度依赖于被控对象的数学模型,而磁悬浮系统的模型参数会随着工况的变化而发生改变,这导致通过该方法设计的控制器难以取得较好的控制效果。
7、综上,现有技术的缺点如下:
8、1.利用经典控制理论设计的pid控制器是一种适用于线性系统的控制方法,而磁悬浮系统是一种非线性系统,导致该控制器难以在磁悬浮系统中取得较好的控制效果。
9、2.专利cn202210810247.4、专利cn202210265772.2、专利cn201710839078.6等利用现代控制理论方法设计的控制器依赖被控对象的实际模型,而磁悬浮系统由于其非线性、强耦合的特点,难以获取准确的数学模型,这导致利用这些方法设计的控制器只能在仿真中取得效果,但是难以真正的应用在实际中。
技术实现思路
1、本发明的目的在于,针对上述现有技术的不足,提供一种磁悬浮系统及其双闭环自抗扰控制器、控制方法,适合于磁悬浮系统的实际运用。
2、为解决上述技术问题,本发明所采用的技术方案是:
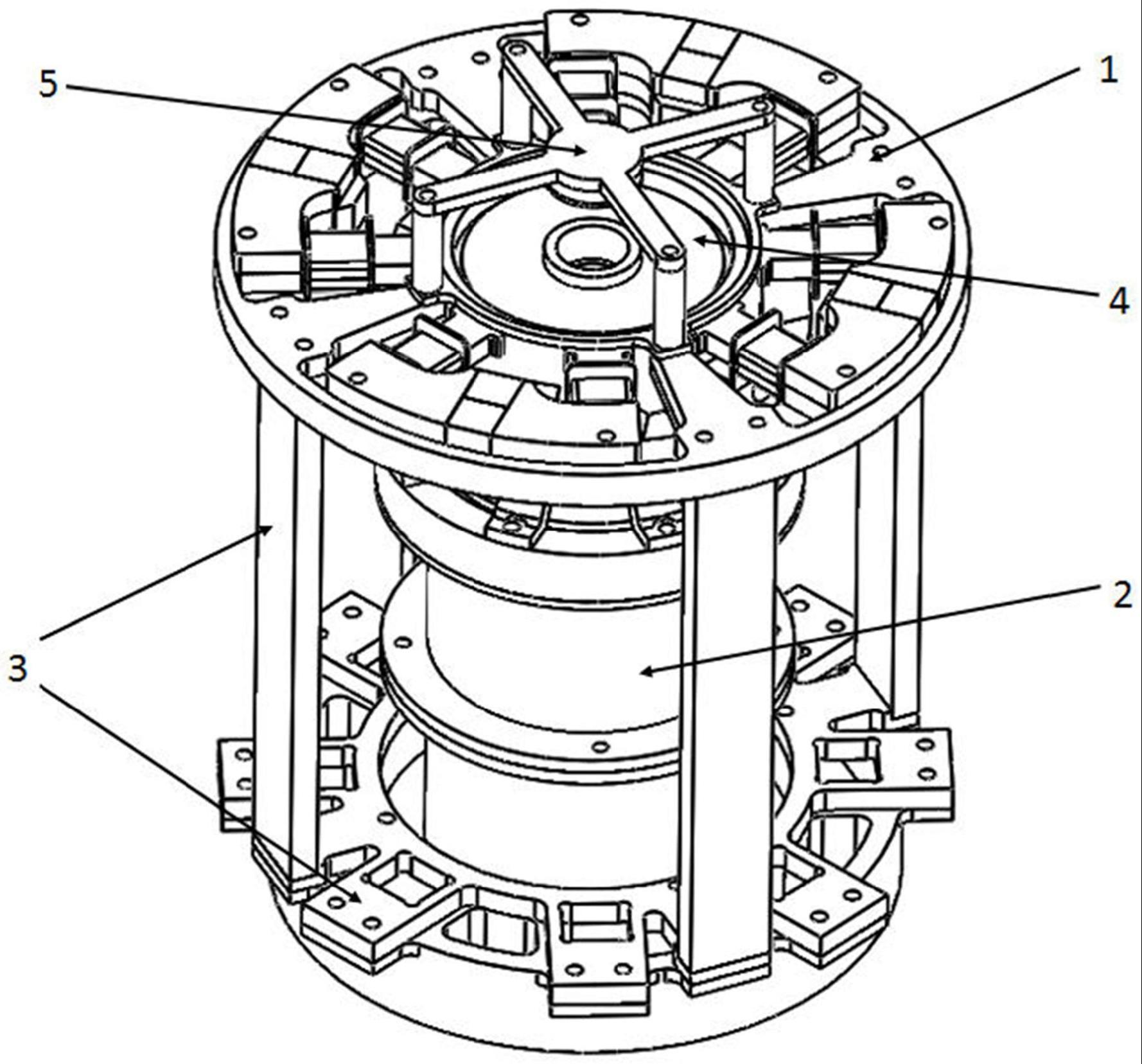
3、一种磁悬浮系统,其特点是包括磁轴承模块、驱动功能模块、磁悬浮转子、位移检测模块,其中:
4、磁轴承模块上设有电磁线圈,电磁线圈用于产生作用于磁悬浮转子的电磁力,以使得磁悬浮转子悬浮于磁轴承模块的中心位置;
5、驱动功能模块用于驱动磁悬浮转子旋转;
6、位移检测模块用于检测磁悬浮转子相对于磁轴承模块的相对位移。
7、进一步地,还包括驱动电机;所述磁悬浮转子的轴向的第一段位于磁轴承模块的中心,磁悬浮转子的轴向的第二段与驱动功能模块轴向磁耦合,驱动电机的输出轴与驱动功能模块相连。
8、作为一种优选方式,所述驱动功能模块上径向均布有多个驱动磁极,所述磁悬浮转子径向具有与驱动磁极一一对应的转子磁极。
9、作为一种优选方式,所述磁轴承模块上周圈分散布置有多组驱动线圈、永磁体及导磁件,每组驱动线圈对应缠绕在导磁件上,每对导磁件间设置一永磁体;所述磁悬浮转子外设置导磁环。
10、作为一种优选方式,所述位移检测模块为非接触式位移传感器,且非接触式位移传感器安装在磁轴承模块上。
11、进一步地,还包括支撑模块,所述支撑模块与磁轴承模块相连。
12、基于同一个发明构思,本发明还提供了一种磁悬浮系统双闭环自抗扰控制器,作用于所述的磁悬浮系统;其特点是所述控制器用于基于位移监测模块的检测结果控制电磁线圈产生的电磁力,以调整磁悬浮转子的位置,直至磁悬浮转子悬浮于磁轴承模块的中心位置。
13、作为一种优选方式,所述控制器为双闭环自抗扰控制器,控制器的外环为位置环,控制器的内环为电流环,位置环的输出为电流环的输入;位置环的控制采用线性自抗扰控制器。
14、作为一种优选方式,所述位置环包括扩张状态观测器,所述扩张状态观测器通过位置环的输出、位移检测模块的检测结果来观测磁悬浮系统的总扰动。
15、基于同一个发明构思,本发明还提供了一种所述的磁悬浮系统双闭环自抗扰控制器的双闭环自抗扰控制方法。
16、与现有技术相比,本发明提出一种新型磁悬浮系统结构,在此基础上,根据其物理模型的特点,同步设计适用于磁悬浮系统的双闭环自抗扰控制器,在利用系统数学模型的前提下,又不过分依赖系统的模型,并且为了便于实际工程实现,本发明采用了线性化的控制器设计方法,该方法在仿真与实验中均取得了较好的控制效果,更适合于磁悬浮系统的实际运用。
技术特征:
1.一种磁悬浮系统,其特征在于,包括磁轴承模块、驱动功能模块、磁悬浮转子、位移检测模块,其中:
2.根据权利要求1所述的磁悬浮系统,其特征在于,还包括驱动电机;所述磁悬浮转子的轴向的第一段位于磁轴承模块的中心,磁悬浮转子的轴向的第二段与驱动功能模块轴向磁耦合,驱动电机的输出轴与驱动功能模块相连。
3.根据权利要求1或2所述的磁悬浮系统,其特征在于,所述驱动功能模块上径向均布有多个驱动磁极,所述磁悬浮转子径向具有与驱动磁极一一对应的转子磁极。
4.根据权利要求1或2所述的磁悬浮系统,其特征在于,所述磁轴承模块上周圈分散布置有多组驱动线圈、永磁体及导磁件,每组驱动线圈对应缠绕在导磁件上,每对导磁件间设置一永磁体;所述磁悬浮转子外设置导磁环。
5.根据权利要求1或2所述的磁悬浮系统,其特征在于,所述位移检测模块为非接触式位移传感器,且非接触式位移传感器安装在磁轴承模块上。
6.根据权利要求1或2所述的磁悬浮系统,其特征在于,还包括支撑模块,所述支撑模块与磁轴承模块相连。
7.一种磁悬浮系统双闭环自抗扰控制器,作用于如权利要求1至6任一项所述的磁悬浮系统;其特征在于,
8.根据权利要求1或2所述的磁悬浮系统,其特征在于,所述控制器为双闭环自抗扰控制器,控制器的外环为位置环,控制器的内环为电流环,位置环的输出为电流环的输入;位置环的控制采用线性自抗扰控制器。
9.根据权利要求8所述的磁悬浮系统,其特征在于,所述位置环包括扩张状态观测器,所述扩张状态观测器通过位置环的输出、位移检测模块的检测结果来观测磁悬浮系统的总扰动。
10.一种如权利要求7至9任一项所述的磁悬浮系统双闭环自抗扰控制器的双闭环自抗扰控制方法。
技术总结
本发明公开了一种磁悬浮系统及其双闭环自抗扰控制器、控制方法,包括磁轴承模块、驱动功能模块、磁悬浮转子、位移检测模块,磁轴承模块上设有电磁线圈,电磁线圈用于产生作用于磁悬浮转子的电磁力,以使得磁悬浮转子悬浮于磁轴承模块的中心位置;驱动功能模块用于驱动磁悬浮转子旋转;位移检测模块用于检测磁悬浮转子相对于磁轴承模块的相对位移。控制器用于基于位移监测模块的检测结果控制电磁线圈产生的电磁力,以调整磁悬浮转子的位置,直至磁悬浮转子悬浮于磁轴承模块的中心位置。本发明在利用系统数学模型的前提下,又不过分依赖系统的模型,在仿真与实验中均取得了较好的控制效果,更适合于磁悬浮系统的实际运用。
技术研发人员:江负成,孙天夫,郑海荣,梁嘉宁,赵子昊,李慧云
受保护的技术使用者:中国科学院深圳先进技术研究院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!