一种管道内自爬行机器人防打滑控制方法及装置
本发明涉及管道内自爬行机器人控制,特别是涉及一种管道内自爬行机器人防打滑控制方法及装置。
背景技术:
1、随着工业的发展,管道运输作为一种运量大、成本低的能源运输方式,应用范围越来越广泛。管道往往采用管道机器人进行检测,其行走模式主要包括蠕动式、多足行走式、履带式、轮式等。其中,支撑轮式机器人由于牵引力大、运动速度快、具有通过空间管道潜力等优点,较多应用于管道检测中,但其依然存在易打滑、难于实现长里程检测等缺点。
2、现有相关研究主要集中于支撑轮式机器人电机稳速控制、差动系统控制上,并未对这些缺点做出改进。考虑到检测过程中,运输管道内部状况受残留运输物质、管道变形、裂纹与孔洞影响,较为复杂急需一种防打滑控制方法。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明提出了一种管道内自爬行机器人防打滑控制方法,根据管道情况实时调整支撑轮压力,实现管道内自爬行机器人防打滑的节能运行。
3、本发明的另一个目的在于提出一种管道内自爬行机器人防打滑控制装置。
4、为达上述目的,本发明一方面提出一种管道内自爬行机器人防打滑控制方法,包括:
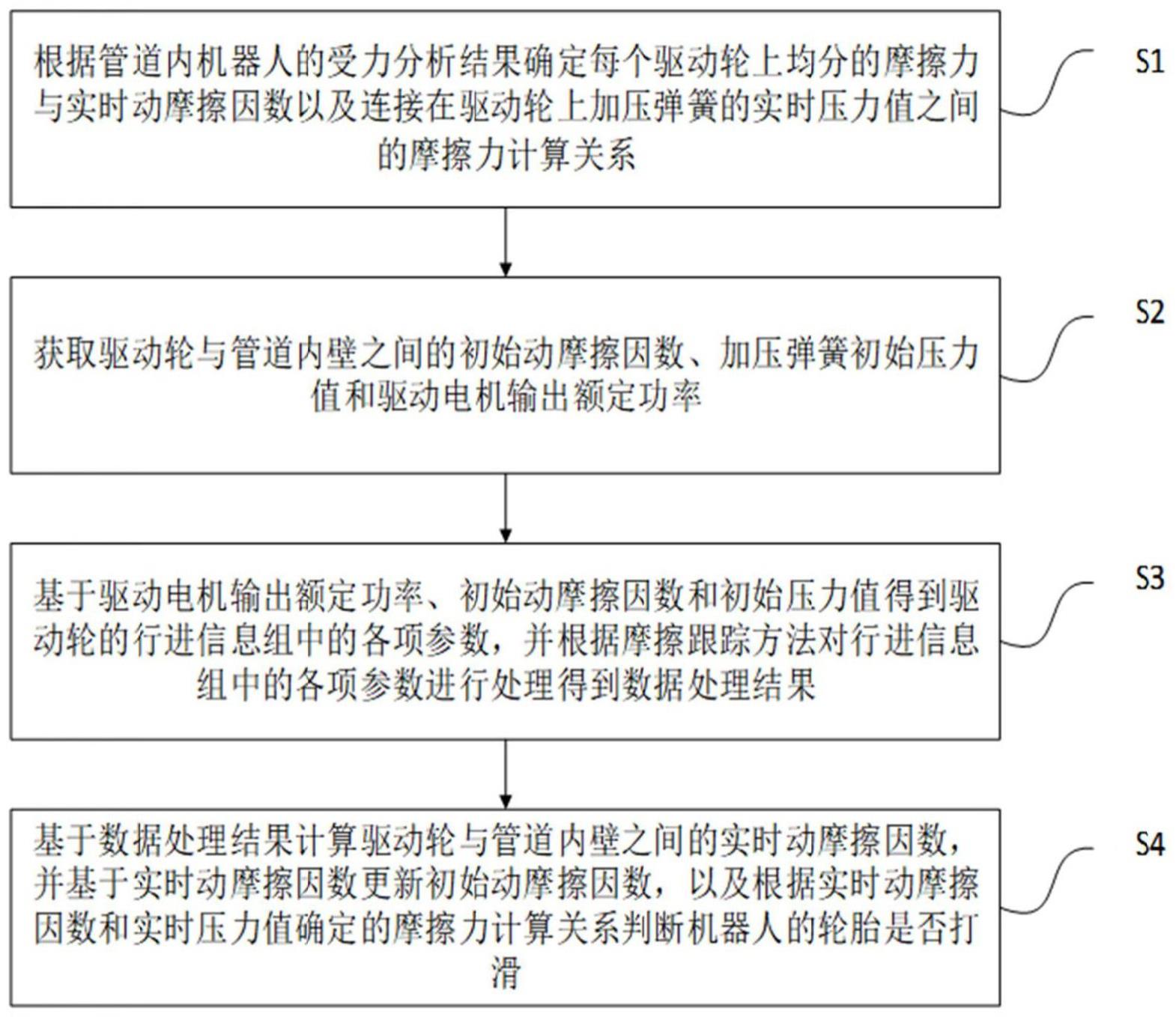
5、根据管道内机器人的受力分析结果确定每个驱动轮上均分的摩擦力与实时动摩擦因数以及连接在驱动轮上加压弹簧的实时压力值之间的摩擦力计算关系;
6、获取驱动轮与管道内壁之间的初始动摩擦因数、加压弹簧初始压力值和驱动电机输出额定功率;
7、基于所述驱动电机输出额定功率、所述初始动摩擦因数和所述初始压力值得到驱动轮的行进信息组中的各项参数,并根据摩擦跟踪方法对所述行进信息组中的各项参数进行处理得到数据处理结果;
8、基于所述数据处理结果计算驱动轮与管道内壁之间的所述实时动摩擦因数,并基于所述实时动摩擦因数更新所述初始动摩擦因数,以及根据所述实时动摩擦因数和所述实时压力值确定的摩擦力计算关系判断机器人的轮胎是否打滑。
9、另外,根据本发明上述实施例的管道内自爬行机器人防打滑控制方法还可以具有以下附加的技术特征:
10、进一步地,在本发明的一个实施例中,根据对管道内机器人的驱动轮个数和驱动轮分布方式进行受力分析,得到常数的受力分析结果。
11、进一步地,在本发明的一个实施例中,所述行进信息组,包括第一压力值n0、第一动摩擦因数μ()、驱动电机输出额定功率p0、电机电枢电动势ea、电枢电流ia、转子角速度ω和机器人轮径r。
12、进一步地,在本发明的一个实施例中,所述摩擦跟踪方法,包括:
13、将机器人放置在管道环境中微动运行;
14、将加压弹簧的初始压力值设为最大,记录驱动轮行进速度v;
15、第一次调节初始压力值至驱动发生打滑,增大初始压力值至恰好不打滑,记录初始压力值为n,修正新的并更新行进信息组中的信息;
16、第m次调节初始压力值至此时驱动轮若打滑,则增大初始压力值至恰好不打滑,记录初始压力值为nm,修正新的并更新行进信息组中的信息;
17、重复调节初始压力值,直到第m次不打滑而第m-1次打滑,取μ=μm,为管道内的实时动摩擦因数;
18、此后迭代中,将上次调节初始压力值得到的实时动摩擦因数作为新的μ。
19、进一步地,在本发明的一个实施例中,所述摩擦力计算关系为:
20、f=kμn
21、其中,f为每个驱动轮上均分的摩擦力,k为常数,μ为实时动摩擦因数,n为加压弹簧的实时压力值。
22、为达上述目的,本发明另一方面提出一种管道内自爬行机器人防打滑控制装置,包括:
23、状态信息采集模块、计算模块、判定模块、防打滑模块和主控模块,
24、状态信息采集模块,用于采集机器人驱动轮的行进信息组;
25、计算模块,用于基于所述行进信息组进行摩擦跟踪方法的计算得到动摩擦因数的计算结果;
26、判定模块,用于根据所述行进信息组得到机器人驱动轮是否打滑的判定结果;
27、防打滑模块,用于调节加压弹簧的压力值,并执行所述动摩擦因数的计算结果;
28、主控模块,用于对所述计算结果和判定结果进行分析,根据分析结果反馈控制信号至所述防打滑模块。
29、本发明实施例的管道内自爬行机器人防打滑控制方法和装置,利用传感器获取行进信息组,利用摩擦跟踪方法求解对应管段的实时动摩擦因数,再进行更新,实现兼顾节能的自适应防打滑控制。解决了管道内爬行机器人续航里程短、在复杂管段中易打滑的问题。
30、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种管道内自爬行机器人防打滑控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述受力分析结果,包括:
3.根据权利要求1所述的方法,其特征在于,所述行进信息组,包括第一压力值n0、第一动摩擦因数μ()、驱动电机输出额定功率p0、电机电枢电动势ea、电枢电流ia、转子角速度ω和机器人轮径r。
4.根据权利要求3所述的方法,其特征在于,所述摩擦跟踪方法,包括:
5.根据权利要求1所述的方法,其特征在于,所述摩擦力计算关系为:
6.一种管道内自爬行机器人防打滑控制装置,其特征在于,包括状态信息采集模块、计算模块、判定模块、防打滑模块和主控模块,
7.根据权利要求6所述的装置,其特征在于,所述行进信息组,包括第一压力值n0、第一动摩擦因数μ()、驱动电机输出额定功率p0、电机电枢电动势ea、电枢电流ia、转子角速度ω和机器人轮径r。
8.根据权利要求6所述的方法,其特征在于,所述状态信息采集模块包括计速轮、压力应变片和电气传感器;所述计速轮通过轮架固定于机器人驱动轮前,所述压力应变片的两面分别与加压弹簧和弹簧支架相连,用于收集加压弹簧向驱动轮施加的压力信息,所述电气传感器与驱动电机连接,用于测量电压电流信息。
9.根据权利要求6所述的方法,其特征在于,所述加压弹簧施加预压力值,所述压力应变片反馈的压力信息为压力增量;所述电气传感器测量得到驱动电机的输入功率小于预设量程阈值。
10.根据权利要求6所述的方法,其特征在于,所述主控模块,包括mcu、mpu和fpga芯片中的一种。
技术总结
本发明公开了一种管道内自爬行机器人防打滑控制方法及装置,该方法包括:获取管道内自爬行机器人正常运行时每个驱动轮上均分的摩擦力与动摩擦因数关系;进入管道前,预设动摩擦因数,微动驱动轮,获取行进信息组,利用摩擦跟踪方法处理信息;计算并记录机器人所处位置的实时动摩擦因数;根据该位置实时动摩擦因数及摩擦跟踪方法,更新摩擦力数值,根据实时动摩擦因数调整加压弹簧压力。本发明不但能适用于常规管道内爬行时防打滑需求,更能使机器人处于最节能工作状态,解决管道内自爬行机器人打滑及长里程续航问题。
技术研发人员:黄松岭,刘杨博,彭丽莎,李世松,温舒智
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!