一种石油管道检修机器人的制作方法
本发明涉及石油管道,具体为一种石油管道检修机器人。
背景技术:
1、石油管道(也称管线、管路)是由油管及其附件所组成,并按照工艺流程的需要,配备相应的油泵机组,设计安装成一个完整的管道系统,用于完成油料接卸及输转任务,当石油管道在长时间使用后,其内壁会出现腐蚀的情况,而管道内壁出现腐蚀可能会导致石油的泄露,因此,工作人员为了防止因管道出现腐蚀发生石油泄露,都会定期使用检修机器人对其石油管道进行检查,以防止此类事件的出现。
2、现有的石油管道用检修机器人在实际使用过程中,虽然可以对石油管道内壁进行检查操作,并将检查到的图像传输到操控者面前的显示屏上,进行观察,但是不能对石油管道检查到的腐蚀位置进行维修处理,即导致后期工作人员还需用专门工具将其管道位置打开,进行维修,工作量大,还增加成本的支出,继而降低检修机器人的使用效率。
3、因此,需要提出新型的一种石油管道检修机器人,以便于解决上述中提出的问题。
技术实现思路
1、本发明的目的在于提供一种石油管道检修机器人,以解决检修机器人不能对石油管道检查到的腐蚀位置进行维修处理,即导致后期工作人员还需用专门工具将其管道位置打开,进行维修,工作量大,还增加成本的支出,继而降低检修机器人使用效率的问题。
2、为实现上述目的,本发明提供如下技术方案:一种石油管道检修机器人,包括爬行器,所述爬行器的顶部设置有检修机构;
3、所述检修机构包括控制器、两个圆柱槽、连接板和电池盒,两个所述圆柱槽的内壁底部均安装有电推杆,两个所述电推杆的伸缩端顶端之间安装有安装板,所述安装板的顶部开设有限位孔,所述限位孔的内壁一侧转动嵌设有转杆,所述安装板的内壁一侧安装有电机,所述转杆的外表面转动连接有转块,所述转块的顶部安装有钢丝板,所述转块的正表面开设有安装孔,所述安装孔的内部安装有第一电动伸缩杆,所述第一电动伸缩杆的伸缩端固定有空心块,所述空心块的内部安装有圆管,所述圆管的输出端安装有喷头,所述控制器的顶部安装有无线传输模块,所述连接板的上侧斜面安装有全景摄像头,所述电池盒的内部设置有电池本体,所述安装板的顶部安装有水泵,所述安装板的顶部固定有储液壳,所述储液壳的顶部安装有壳盖,所述储液壳的正表面固定贯穿有进液管,所述水泵的输出端安装有软管。
4、优选的,所述控制器安装在爬行器的顶部,两个所述圆柱槽均开设于爬行器的顶部,所述转杆的另一端活动贯穿限位孔的内壁另一侧,所述电机的输出端与转杆的另一端相安装。
5、优选的,所述控制器分别与两个电推杆电性连接,所述控制器与电机电性连接,所述控制器与第一电动伸缩杆电性连接,所述控制器与无线传输模块电性连接,所述控制器与全景摄像头电性连接,所述控制器与电池本体电性连接,所述控制器与水泵电性连接。
6、优选的,所述连接板的底部与爬行器的顶部相固定,所述电池盒的底部与爬行器的顶部相固定,所述进液管的输入端靠近储液壳内部底部位置,所述进液管的输出端与水泵的输入端相连接,所述软管的输出端与圆管的输入端相连接。
7、优选的,所述电池盒的内壁等距分布开设有多个散热孔,所述电池盒的内部安装有两个固定架,且两个固定架的底部均与电池本体的顶部相接触,所述电池盒的顶部安装有电池盖,两个所述电推杆的外表面均设置有稳定架,两个所述稳定架均通过螺栓安装在爬行器的顶部。
8、优选的,所述爬行器的顶部设置有稳定机构,所述稳定机构包括两个第二电动伸缩杆、两个安装槽和四个矩形孔,两个所述第二电动伸缩杆分别安装在两个安装槽的内壁底部,两个所述安装槽均开设于爬行器的顶部,每个所述矩形孔均开设于爬行器的顶部,每个所述矩形孔的内部均活动套接有凹型柱。
9、优选的,四个所述凹型柱共分为两组,每组所述凹型柱的相对一侧之间均固定有矩形板,两个所述矩形板的底部均通过第一螺丝分别与两个第二电动伸缩杆的伸缩端顶端相安装,每组所述凹型柱的相对一侧均开设有卡槽,每个所述卡槽的内部均设置有支撑板,四个所述支撑板共分为两组,每组所述支撑板均通过第二螺丝分别安装在每个矩形板的底部,每组所述凹型柱的相对一侧之间均固定有矩形块。
10、优选的,每个所述凹型柱的内部均设置有多孔柱,每个所述多孔柱的顶部均粘接连接有防滑垫,每组所述凹型柱的同一面均活动贯穿有固定螺栓,每个所述固定螺栓的一端分别活动贯穿每个多孔柱上其中一个通孔的内部,每个所述固定螺栓的一端分别螺纹贯穿每个凹型柱的内壁。
11、与现有技术相比,本发明的有益效果是:
12、1、本发明通过设置检修机构,可以对石油管道内壁的腐蚀位置进行打磨除锈,并可以对打磨除锈后的石油管壁进行缓蚀剂喷涂,操作简单,工作量小,成本低,有效的提高了检修机器人的使用效率,在电推杆、安装板和转块的配合下,可以调节钢丝板的高度,在水泵、进液管、软管和圆管的配合下,可以将储液壳内部的缓蚀剂液体吸出,传输到喷头的内部,在电池盖和电池盒的配合下,可以对电池本体进行保护,在全景摄像头、无线传输模块和控制器的配合下,可以将检修机器人经过的区域图像传输到地面控制台上。
13、2、本发明通过设置稳定机构,可以保证钢丝板对石油管道内壁腐蚀位置打磨时的稳定性,在第二电动伸缩杆、矩形板、矩形块和矩形孔的配合下,可以带动所对应的凹型柱进行稳定垂直移动,在卡槽和支撑板的配合下,可以提高矩形板与凹型柱之间连接的稳定性,在固定螺栓和凹型柱的配合下,可以将移动后的多孔板进行固定。
技术特征:
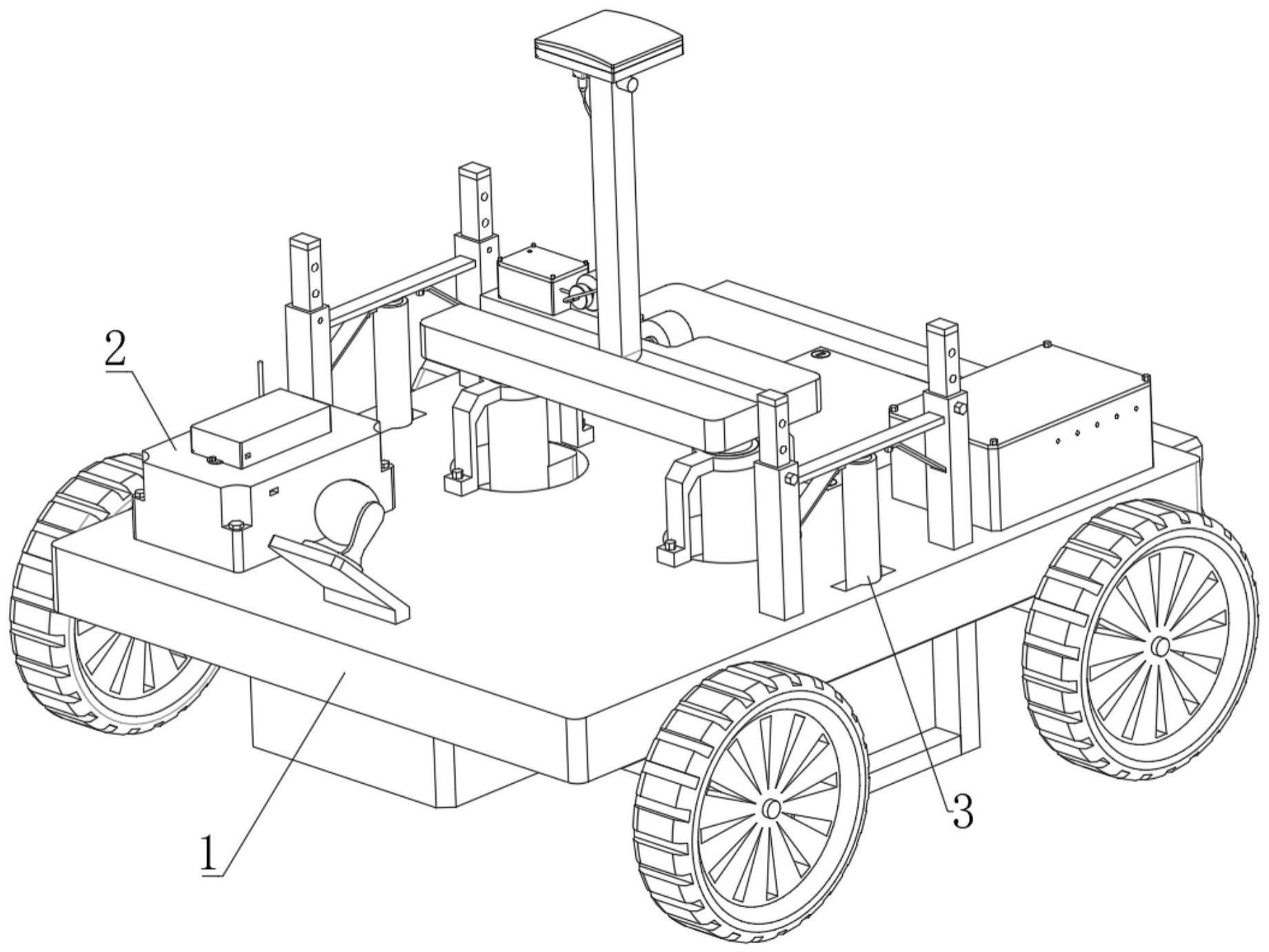
1.一种石油管道检修机器人,包括爬行器(1),其特征在于:所述爬行器(1)的顶部设置有检修机构(2);
2.根据权利要求1所述的石油管道检修机器人,其特征在于:所述控制器(201)安装在爬行器(1)的顶部,两个所述圆柱槽(202)均开设于爬行器(1)的顶部,所述转杆(206)的另一端活动贯穿限位孔(205)的内壁另一侧,所述电机(207)的输出端与转杆(206)的另一端相安装。
3.根据权利要求1所述的石油管道检修机器人,其特征在于:所述控制器(201)分别与两个电推杆(203)电性连接,所述控制器(201)与电机(207)电性连接,所述控制器(201)与第一电动伸缩杆(212)电性连接,所述控制器(201)与无线传输模块(216)电性连接,所述控制器(201)与全景摄像头(218)电性连接,所述控制器(201)与电池本体(220)电性连接,所述控制器(201)与水泵(221)电性连接。
4.根据权利要求1所述的石油管道检修机器人,其特征在于:所述连接板(217)的底部与爬行器(1)的顶部相固定,所述电池盒(219)的底部与爬行器(1)的顶部相固定,所述进液管(223)的输入端靠近储液壳(222)内部底部位置,所述进液管(223)的输出端与水泵(221)的输入端相连接,所述软管(224)的输出端与圆管(214)的输入端相连接。
5.根据权利要求1所述的石油管道检修机器人,其特征在于:所述电池盒(219)的内壁等距分布开设有多个散热孔(225),所述电池盒(219)的内部安装有两个固定架(226),且两个固定架(226)的底部均与电池本体(220)的顶部相接触,所述电池盒(219)的顶部安装有电池盖(227),两个所述电推杆(203)的外表面均设置有稳定架(228),两个所述稳定架(228)均通过螺栓安装在爬行器(1)的顶部。
6.根据权利要求1所述的石油管道检修机器人,其特征在于:所述爬行器(1)的顶部设置有稳定机构(3),所述稳定机构(3)包括两个第二电动伸缩杆(301)、两个安装槽(302)和四个矩形孔(303),两个所述第二电动伸缩杆(301)分别安装在两个安装槽(302)的内壁底部,两个所述安装槽(302)均开设于爬行器(1)的顶部,每个所述矩形孔(303)均开设于爬行器(1)的顶部,每个所述矩形孔(303)的内部均活动套接有凹型柱(307)。
7.根据权利要求6所述的石油管道检修机器人,其特征在于:四个所述凹型柱(307)共分为两组,每组所述凹型柱(307)的相对一侧之间均固定有矩形板(304),两个所述矩形板(304)的底部均通过第一螺丝分别与两个第二电动伸缩杆(301)的伸缩端顶端相安装,每组所述凹型柱(307)的相对一侧均开设有卡槽(305),每个所述卡槽(305)的内部均设置有支撑板(306),四个所述支撑板(306)共分为两组,每组所述支撑板(306)均通过第二螺丝分别安装在每个矩形板(304)的底部,每组所述凹型柱(307)的相对一侧之间均固定有矩形块(308)。
8.根据权利要求6所述的石油管道检修机器人,其特征在于:每个所述凹型柱(307)的内部均设置有多孔柱(309),每个所述多孔柱(309)的顶部均粘接连接有防滑垫(310),每组所述凹型柱(307)的同一面均活动贯穿有固定螺栓(311),每个所述固定螺栓(311)的一端分别活动贯穿每个多孔柱(309)上其中一个通孔的内部,每个所述固定螺栓(311)的一端分别螺纹贯穿每个凹型柱(307)的内壁。
技术总结
本发明公开了一种石油管道检修机器人,包括爬行器,所述检修机构包括控制器、两个圆柱槽、连接板和电池盒,两个所述圆柱槽的内壁底部均安装有电推杆,两个所述电推杆的伸缩端顶端之间安装有安装板,所述限位孔的内壁一侧转动嵌设有转杆,所述安装板的内壁一侧安装有电机,所述转杆的外表面转动连接有转块,所述转块的顶部安装有钢丝板,所述控制器的顶部安装有无线传输模块,所述连接板的上侧斜面安装有全景摄像头,所述安装板的顶部安装有水泵,本发明通过设置检修机构,可以对石油管道内壁的腐蚀位置进行打磨除锈,并可以对打磨除锈后的石油管壁进行缓蚀剂喷涂,操作简单,工作量小,成本低,有效的提高了检修机器人的使用效率。
技术研发人员:王德利
受保护的技术使用者:天津市万全设备安装有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!