一种管道内爬行机器人爬立管控制方法及装置
本发明涉及管道内爬行机器人,特别是涉及一种管道内爬行机器人爬立管控制方法及装置。
背景技术:
1、为保障油气管道的安全、可靠运行,投产前与检修期的检测工作必不可少。而由于油气管道往往深埋地下,人员无法直接进行检测,常使用管道内检测机器人实现检测目的。目前管道内检测机器人主要以空压机作为动力源,利用压缩空气推动检测器运行。该传统检测器主要存在动力不足、速度不稳、耗能较大,费效比低等缺陷,更难以应对立管、弯管等复杂工况。
2、相关技术中,依靠爬行足实现爬立管、过弯管为主要方法。比如,利用电磁铁与弹簧的配合,通过吸附管壁实现爬行与越障,但该方法爬行速度极慢,控制复杂,机构故障率高;再比如,利用伸缩组件与蠕动组件支撑管壁,进行蠕动爬行,但该方法对管道状况要求较高,爬行速度更慢。而依靠轮式足的爬行机器人,往往无法在立管或弯管的复杂工况下运行。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
2、为此,本发明提出了一种管道内爬行机器人爬立管控制方法,由此实现管道内爬行机器人长距离,多工况下的立管爬行,提高检测效率与覆盖范围。
3、本发明的另一个目的在于提出一种管道内爬行机器人爬立管控制装置。
4、为达上述目的,本发明一方面提出一种管道内爬行机器人爬立管控制方法,包括:
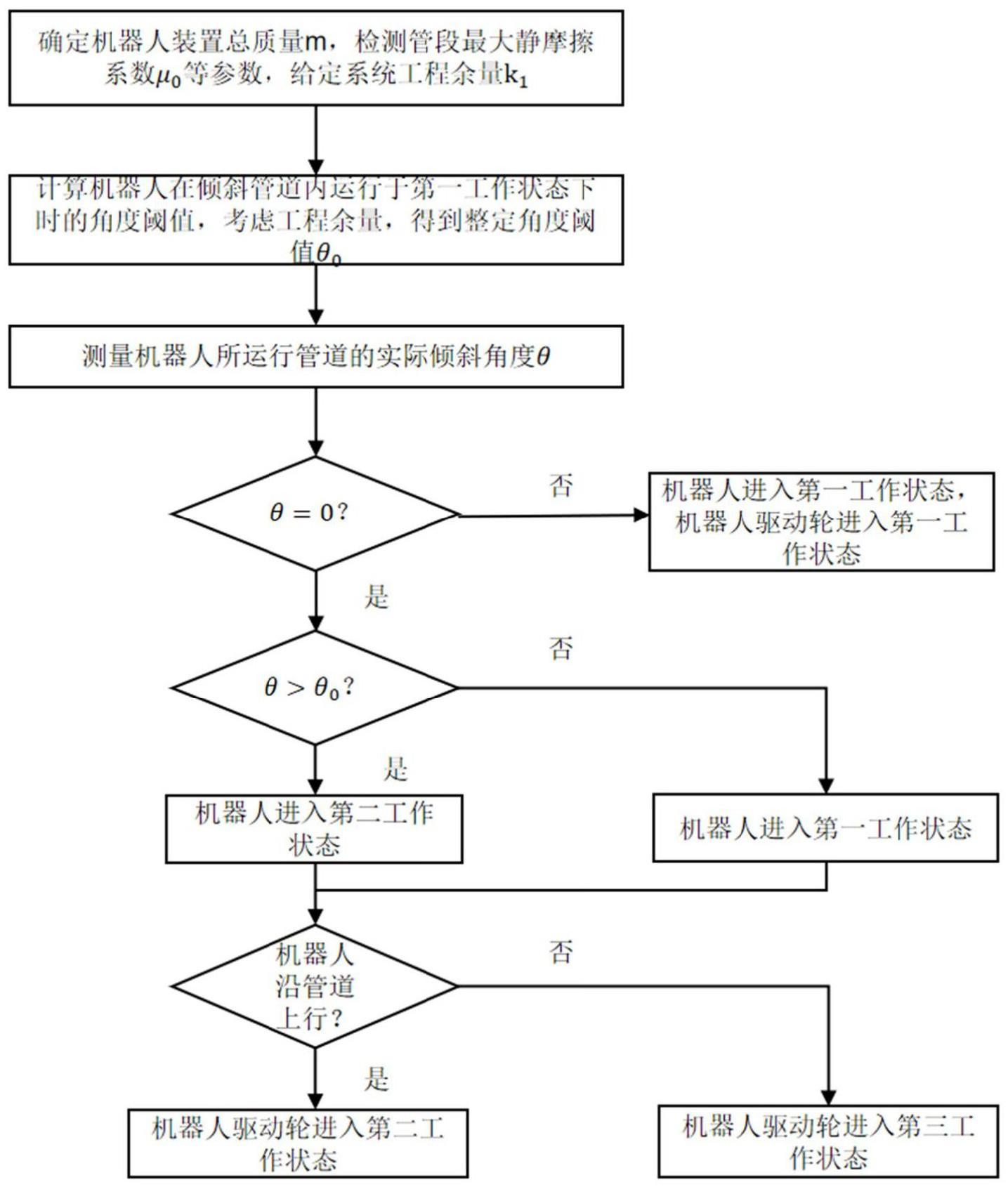
5、获取管道内机器人的相关参数;其中,所述相关参数包括机器人质量、管段最大静摩擦系数和系统工程余量;
6、基于所述相关参数计算在倾斜管道内机器人运行于第一工作状态下时的整定角度阈值;
7、获取机器人的实际运行管道倾角;
8、判断所述实际运行管道倾角是否为零以及和所述整定角度阈值的大小关系以根据第一判断结果确定机器人运行的工作状态,并判断机器人是否沿管道上行,以根据第二判断结果确定机器人驱动轮的工作状态。
9、另外,根据本发明上述实施例的管道内爬行机器人爬立管控制方法还可以具有以下附加的技术特征:
10、进一步地,在本发明的一个实施例中,所述判断所述实际运行管道倾角是否为零以及和所述整定角度阈值的大小关系以根据第一判断结果确定机器人运行的工作状态,并判断机器人是否沿管道上行,以根据第二判断结果确定机器人驱动轮的工作状态,包括:
11、若判断实际运行管道倾角为零,控制机器人运行于所述第一工作状态,以及机器人驱动轮运行于所述第一工作状态;
12、若判断实际运行管道倾角不为零,且实际运行管道倾角小于整定角度阈值,机器人维持第一工作状态,判断机器人是否沿管道上行,若判断沿管道上行,则机器人驱动轮通过驱动轮电机进入第二工作状态,若判断沿管道下行,则机器人驱动轮通过驱动轮电机运行状态变化进入第三工作状态;
13、若判断实际运行管道倾角不为零,且实际运行管道倾角大于整定角度阈值,机器人通过运行机械装置进入第二工作状态,判断机器人是否沿管道上行,若判断沿管道上行,则机器人驱动轮通过驱动轮电机运行状态变化进入第二工作状态,若判断沿管道下行,则机器人驱动轮通过驱动轮电机运行状态变化进入第三工作状态。
14、进一步地,在本发明的一个实施例中,所述第一工作状态,为机器人运行于水平管道或倾斜角度小于等于整定角度阈值的管道的情况;所述第二工作状态为机器人运行于倾斜角度大于整定角度阈值管道的情况,此时机器人全部驱动轮均与管壁接触且有正压力阈值;所述机器人驱动轮第三工作状态,为沿管道下行情况下机器人驱动轮的工作状态。
15、进一步地,在本发明的一个实施例中,所述整定角度阈值的计算公式为:
16、
17、其中,θ0为整定角度阈值,μ0为最大静摩擦系数,k1为系统工程余量。
18、进一步地,在本发明的一个实施例中,所述正压力阈值的最小值在沿管道上行和沿管道下行时计算公式不同,沿管道上行时计算公式为:
19、
20、沿管道下行时计算公式为:
21、
22、为达上述目的,本发明另一方面提出一种管道内爬行机器人爬立管控制装置,包括:固定装置、传动装置、步进电机、驱动轮、姿态传感器和中央处理器,
23、所述固定装置,用于固定机器人整体的机械结构;
24、所述传动装置,用于使得驱动轮向管壁施加正压力;
25、所述步进电机,用于向传动装置提供动力;
26、所述驱动轮,用于驱动机器人沿管运行,并在爬立管时提供摩擦力;
27、所述姿态传感器,用于获取管道实际倾角和沿管道上下行状态,并向中央处理器发送;
28、所述中央处理器,用于判定管道实际倾角与预设倾角的大小关系和选择工作模式。
29、本发明实施例的管道内爬行机器人爬立管控制方法和装置,实现管道内爬行机器人长距离,多场景下的立管爬行,提高了检测效率与覆盖范围。
30、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种管道内爬行机器人爬立管控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述判断所述实际运行管道倾角是否为零以及和所述整定角度阈值的大小关系以根据第一判断结果确定机器人运行的工作状态,并判断机器人是否沿管道上行,以根据第二判断结果确定机器人驱动轮的工作状态,包括:
3.根据权利要求1所述的方法,其特征在于,所述第一工作状态,为机器人运行于水平管道或倾斜角度小于等于整定角度阈值的管道的情况;所述第二工作状态为机器人运行于倾斜角度大于整定角度阈值管道的情况,此时机器人全部驱动轮均与管壁接触且有正压力阈值;所述机器人驱动轮第三工作状态,为沿管道下行情况下机器人驱动轮的工作状态。
4.根据权利要求1所述的方法,其特征在于,所述整定角度阈值的计算公式为:
5.根据权利要求3所述的方法,其特征在于,所述正压力阈值的最小值在沿管道上行和沿管道下行时计算公式不同,沿管道上行时计算公式为:
6.一种管道内爬行机器人爬立管控制装置,其特征在于,包括固定装置、传动装置、步进电机、驱动轮、姿态传感器和中央处理器,
7.根据权利要求6所述的装置,其特征在于,所述中央处理器,还用于:
8.根据权利要求7所述的装置,其特征在于,所述第一工作状态,为机器人运行于水平管道或倾斜角度小于等于整定角度阈值的管道的情况;所述第二工作状态为机器人运行于倾斜角度大于整定角度阈值管道的情况,此时机器人全部驱动轮均与管壁接触且有正压力阈值;所述机器人驱动轮第三工作状态,为沿管道下行情况下机器人驱动轮的工作状态。
9.根据权利要求8所述的装置,其特征在于,所述整定角度阈值的计算公式为:
10.根据权利要求8所述的装置,其特征在于,所述正压力阈值的最小值在沿管道上行和沿管道下行时计算公式不同,沿管道上行时计算公式为:
技术总结
本发明公开了一种管道内爬行机器人爬立管控制方法及装置,该方法包括:获取管道内机器人的相关参数;其中,相关参数包括机器人质量、管段最大静摩擦系数和系统工程余量;基于相关参数计算在倾斜管道内机器人运行于第一工作状态下时的整定角度阈值;获取机器人的实际运行管道倾角;判断实际运行管道倾角是否为零以及和整定角度阈值的大小关系以根据第一判断结果确定机器人运行的工作状态,并判断机器人是否沿管道上行,以根据第二判断结果确定机器人驱动轮的工作状态。本发明可以实现管道内爬行机器人长距离,多场景下的立管爬行,提高了检测效率与覆盖范围。
技术研发人员:黄松岭,孔祥博,彭丽莎,李世松,温舒智,刘杨博
受保护的技术使用者:清华大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!