一种曲率自适应风机塔筒扫查架的制作方法
本发明涉及风机塔筒焊缝检测领域,特别是涉及一种曲率自适应风机塔筒扫查架。
背景技术:
1、通常,在风机塔筒焊缝检测的过程中,需要伴随有人力的参与,因此成本会有很大程度的提高。将扫查架应用在风机塔筒焊缝检测中,可以降低成本,普通的扫查架可检测的焊缝是固定的,因此需要设计一种可以调节焊缝扫查宽度以及适应不同尺寸塔筒的扫查架。
2、基于以上问题,本发明提供了一种曲率自适应风机塔筒扫查架,包括:扫查模块、驱动模块、轮胎升降模块、旋转模块;本发明采用轮胎升降模块来调节轮胎与壳体之间的距离,保证扫查模块的探头始终贴合焊缝上进行检测;驱动模块带动旋转模块整体进行运动,用于调节扫查模块与旋转模块之间的角度;旋转模块通过两个旋转臂之间的交错长度来调节两个扫查模块之间的距离。
技术实现思路
1、本发明的目的是提供一种曲率自适应风机塔筒扫查架,实现对不同尺寸塔筒焊缝检测的适应性。
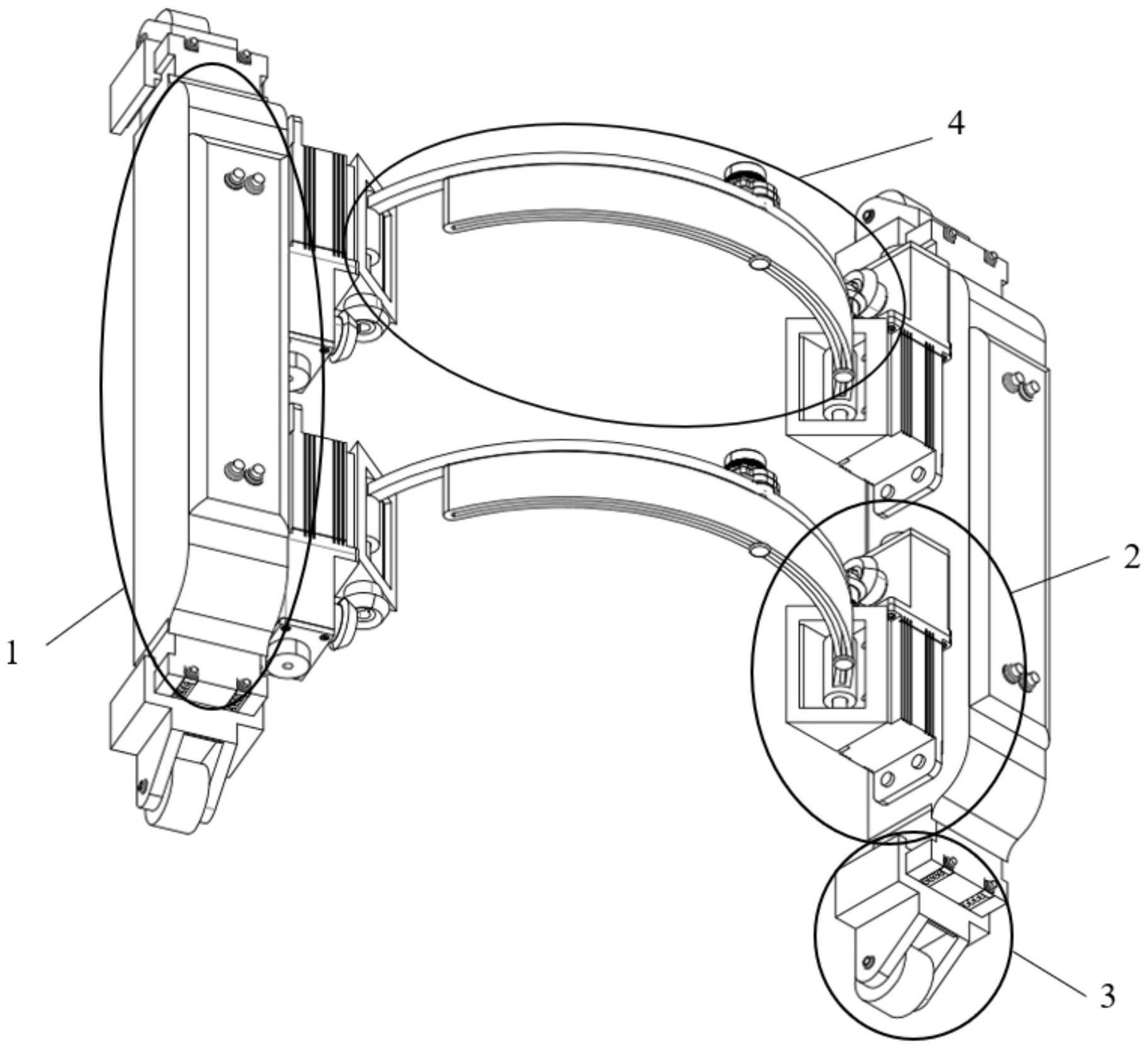
2、为实现上述目的,本发明采用如下技术方案:一种曲率自适应风机塔筒扫查架,其特征在于,包括有:扫查模块1、驱动模块2、轮胎升降模块3、旋转模块4;扫查模块1有两个,对称分布在旋转模块4的两侧,用于对风机塔筒外壁焊缝的检测;驱动模块2有四个,分别通过螺栓固定在扫查模块1的内壁,用于调节扫查模块1与旋转模块4之间的角度;旋转模块4有两个,两者之间相互平行固定在驱动模块2上并用于连接两个扫查模块1,旋转模块4的两端分别同心套装在驱动模块2的轴上,用于调节两个扫查模块1之间的距离;轮胎升降模块3有四个,分别安装在两个扫查模块1的两端,用于调节扫查模块1和塔筒壁面之间的距离。
3、进一步,作为优选,所述的扫查模块1由壳体1-1、永磁铁1-2、固定套杆1-3、弹簧1-4、连杆1-5、探头1-6组成;永磁铁1-2通过固定套杆1-3和弹簧1-4安装在壳体1-1内部,连杆1-5将所述的同一扫查模块1的两个轮胎升降模块3同永磁铁1-2连接在一起,保证永磁铁1-2运动时所述的轮胎升降模块3同步运动。
4、进一步,作为优选,所述的驱动模块2由伺服电机2-1、楔形块2-2、从动轴2-3、锥形齿轮2-4和锥形齿轮2-5组成;楔形块2-2通过伺服电机2-1固定在所述扫查模块1上,锥形齿轮2-4同心安装在楔形块2-2内部的从动轴2-3上,锥形齿轮2-5同心安装在伺服电机2-1的输出轴上,锥形齿轮2-4和锥形齿轮2-5相互啮合。
5、进一步,作为优选,所述的旋转模块4由驱动电机4-1、驱动轴4-2、旋转臂4-3和旋转臂4-4组成,旋转臂4-3和旋转臂4-4依靠所述从动轴2-3固定在所述扫查模块1之间,旋转臂4-3和旋转臂4-4同心相切固定在一起,驱动电机4-1固定在旋转臂4-3上并带动旋转臂4-4运动,用于调节两个扫查模块1之间的距离。
6、本发明的有益效果在于:
7、本发明提供了一种曲率自适应风机塔筒扫查架,包括:扫查模块、驱动模块、轮胎升降模块、旋转模块;本发明采用轮胎升降模块来调节轮胎与壳体之间的距离,保证扫查模块的探头始终贴合焊缝上进行检测;驱动模块带动旋转模块整体进行运动,用于调节扫查模块与旋转模块之间的角度;旋转模块通过两个旋转臂之间的交错长度来调节两个扫查模块之间的距离。
技术特征:
1.一种曲率自适应风机塔筒扫查架,其特征在于,包括有:扫查模块1、驱动模块2、轮胎升降模块3、旋转模块4;扫查模块1有两个,对称分布在旋转模块4的两侧,用于对风机塔筒外壁焊缝的检测;驱动模块2有四个,分别通过螺栓固定在扫查模块1的内壁,用于调节扫查模块1与旋转模块4之间的角度;旋转模块4有两个,两者之间相互平行固定在驱动模块2上并用于连接两个扫查模块1,旋转模块4的两端分别同心套装在驱动模块2的轴上,用于调节两个扫查模块1之间的距离;轮胎升降模块3有四个,分别安装在两个扫查模块1的两端,用于调节扫查模块1和塔筒壁面之间的距离。
2.根据权利要求1所述的一种曲率自适应风机塔筒扫查架,其特征在于,扫查模块1由壳体1-1、永磁铁1-2、固定套杆1-3、弹簧1-4、连杆1-5、探头1-6组成;永磁铁1-2通过固定套杆1-3和弹簧1-4安装在壳体1-1内部,连杆1-5将所述的同一扫查模块1的两个轮胎升降模块3同永磁铁1-2连接在一起,保证永磁铁1-2运动时所述的轮胎升降模块3同步运动。
3.根据权利要求1所述的一种曲率自适应风机塔筒扫查架,其特征在于,驱动模块2由伺服电机2-1、楔形块2-2、从动轴2-3、锥形齿轮2-4和锥形齿轮2-5组成;楔形块2-2通过伺服电机2-1固定在所述扫查模块1上,锥形齿轮2-4同心安装在楔形块2-2内部的从动轴2-3上,锥形齿轮2-5同心安装在伺服电机2-1的输出轴上,锥形齿轮2-4和锥形齿轮2-5相互啮合。
4.根据权利要求1所述的一种曲率自适应风机塔筒扫查架,其特征在于,旋转模块4由驱动电机4-1、驱动轴4-2、旋转臂4-3和旋转臂4-4组成,旋转臂4-3和旋转臂4-4依靠所述从动轴2-3固定在所述扫查模块1之间,旋转臂4-3和旋转臂4-4同心相切固定在一起,驱动电机4-1固定在旋转臂4-3上并带动旋转臂4-4运动,用于调节两个扫查模块1之间的距离。
技术总结
本发明提供了一种曲率自适应风机塔筒扫查架,包括有:扫查模块1、驱动模块2、轮胎升降模块3、旋转模块4;扫查模块1有两个,对称分布在旋转模块4的两侧,用于检测焊缝;驱动模块2有四个,分别通过螺栓固定在扫查模块1的内壁,用于调节扫查模块1与旋转模块4之间的角度;旋转模块4有两个,两者之间相互平行固定在驱动模块2上并用于连接两个扫查模块1,旋转模块4的两端同心安装在驱动模块2的轴上,用于调节两个扫查模块1之间的距离;轮胎升降模块3有四个,分别安装在两个扫查模块1的两端,用于调节扫查模块1和塔筒壁面之间的距离。本发明解决了扫查角度、距离单一的问题,扫查架具有角度、距离可任意调节的特点。
技术研发人员:金洪光,齐城龙,王再飞
受保护的技术使用者:大唐兴安盟新能源有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!