一种走行机构、管道机器人底盘及管道机器人的制作方法
本发明属于管道机器人领域,尤其涉及一种走行机构、管道机器人底盘及管道机器人。
背景技术:
1、管道cctv检测技术是一种非常有效的管道检测方法,它可以快速、准确地检测出管道内部的问题,帮助人们更好地维护和管理管道系统,管道检测机器人作为cctv检测单元的载体,广泛的运用于cctv检测中,市面是最常见的管道检测机器人是轮式机器人,机器人的驱动形式为轮式行走机构,也有一些使用了履带行走机构,一般轮轴与水平面平行,当然,如文献号为cn109483561a《一种模块化支撑履带式管道内机器人》也公开了一种履带呈倾斜设置以提高履带与管道内壁更充分的接触,但其各履带件均是分别由独立匹配的直线模组匹配对应的连杆组件涨缩以满足不同管道直径的需要(个履带件对应的连杆组件涨缩时的同步性不佳),但其连杆件的结构稳定性不佳,同时其直线模组为往复丝杆时,驱动较为繁琐。
技术实现思路
1、为了解决上述技术问题,本发明的目的之一在于提供一种结构简单,且调节方便的走行机构。
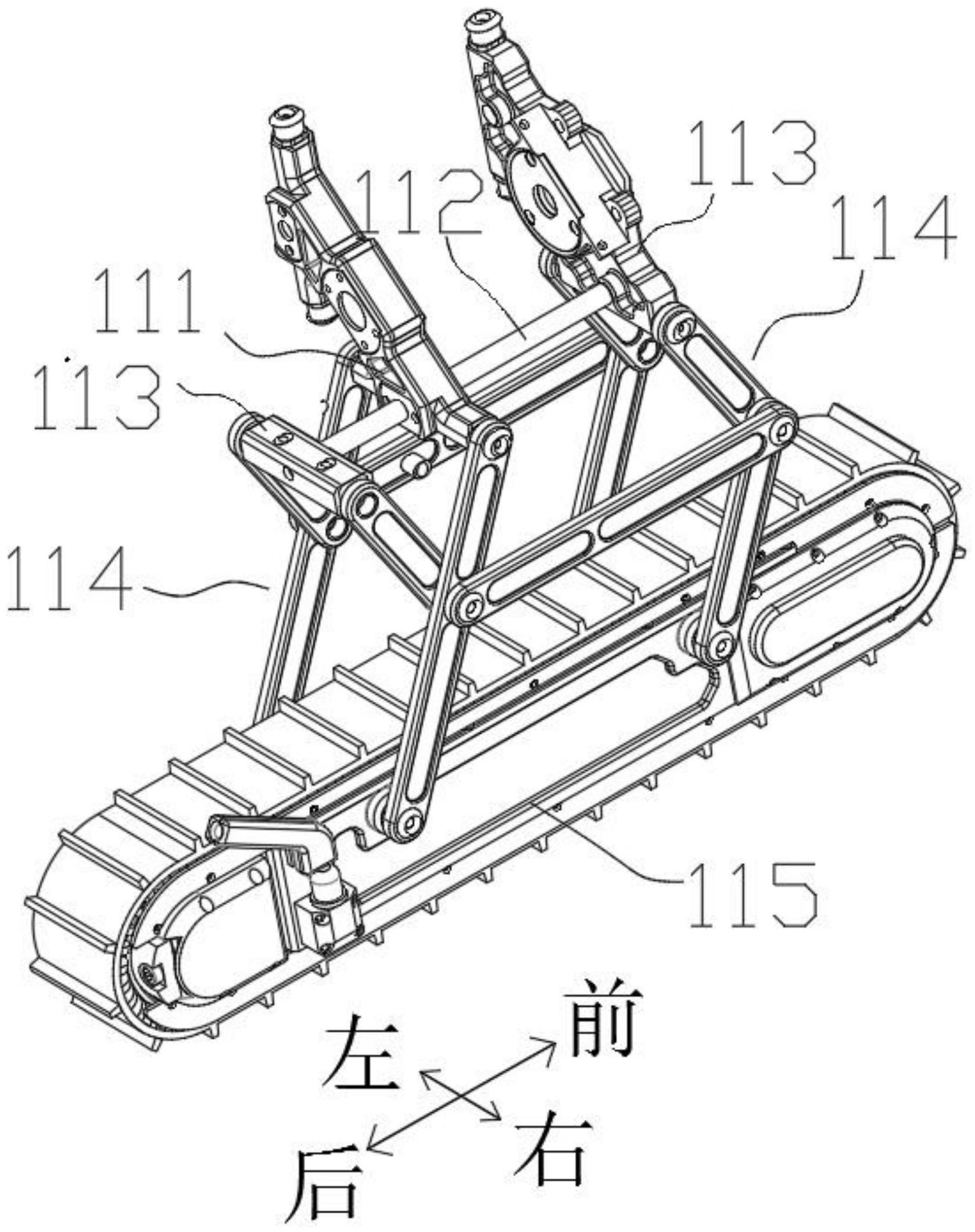
2、为了实现上述目的,本发明的技术方案如下:一种走行机构,包括活动座、滑杆、两个固定座、两个连杆架和两个走行件,两个固定座沿前后方向间隔分布,且所述滑杆和活动座均设置在两个所述固定座之前,所述滑杆沿前后方向设置,且其两端分别与两个所述固定座连接,所述滑杆滑动贯穿所述活动座,两个所述连杆架均沿前后方向竖向设置在所述滑杆的两侧,所述走行件沿前后方向水平设置在两个所述连杆架之间的下方,且两个所述连杆架的下端分别与所述走行件的两侧的连接,两个所述连杆架的上方分别与所述活动座和两个固定座的对应侧连接,所述活动座前后移动以由两个所述连杆架带动所述走行件上下移动。
3、上述技术方案的有益效果在于:其结构简单,且所述活动座在相对于所述滑杆前后滑移时可通过带动两个连杆件收缩或展开以调节对于的走行件相对于滑杆上下移动。
4、上述技术方案中所述走行件为电动履带式走行总成。
5、上述技术方案的有益效果在于:其结构简单。
6、上述技术方案中所述连杆架包括第一连杆、第二连杆、第三连杆、第四连杆和第五连杆,所述第一连杆、第二连杆、第三连杆和第四连杆均竖向设置,所述第五连杆沿前后方向设置,所述第一连杆的上端位于所述第二连杆的下方,且所述第一连杆和第二连杆相互靠近的一端均与所述第五连杆的后端竖向摆转连接,所述第二连杆的上端与位于后方所述固定座的对应侧前后摆转连接,所述第一连杆的下端与所述走行件对应侧的后端前后摆转连接,且所述第三连杆的上端与所述活动座的对应侧前后摆转连接,所述第三连杆的下端与所述走行件对应侧的前端前后摆转连接,所述第四连杆的上端与位于前方的所述固定座的对应侧前后摆转连接,所述第四连杆的下端和第五连杆的前端均与所述第三连杆长度方向对应的中部竖向摆转连接,所述活动座前后移动以由两根所述第三连杆带动对应所述连杆架竖向同步展开或收缩以带动所述走行件上下移动。
7、上述技术方案的有益效果在于:其结构简单,第三连杆的上端在所述活动座的带动下可向前或向后移动以带动对应的连杆件收纳或展开。
8、本发明的目的之二在于提供一种结构简单,且走行机构同步调节性佳的管道机器人底盘。
9、为了实现上述目的,本发明的技术方案如下:一种管道机器人底盘,包括底盘本体、直线模组和两个如上所述的走行机构,所述直线模组沿前后方向设置在所述底盘本体下端中部,两个所述走行机构均沿前后方向设置在所述底盘本体下方的两侧,且呈“八”字形分布,四个所述固定座均与所述底盘本体的下端连接,并在前后方向呈矩形分布,所述直线模组位于四个所述固定座之间的中部,两个所述活动座均与所述直线模组的驱动端连接,所述直线模组驱动两个所述活动座同步沿前后方向移动。
10、上述技术方案的有益效果在于:其结构简单,且可在不同管径的管道内移动,两个走行件均与可管道内壁充分的接触,从而使得其在管道内移动时更为稳定。
11、上述技术方案中所述直线模组为丝杆驱动件。
12、上述技术方案的有益效果在于:其结构简单。
13、上述技术方案中两个所述走行机构之间的夹角为90°-120°。
14、上述技术方案的有益效果在于:这样使得走行件与管道接触效果最佳。
15、本发明的目的之三在于提供一种结构简单,且在管道内移动灵活,可进行拍摄的管道机器人。
16、为了实现上述目的,本发明的技术方案如下:一种管道机器人,包括摄像头和如上所述的管道机器人底盘,所述摄像头安装在所述底盘本体的上方,且其摄像部朝前。
17、上述技术方案的有益效果在于:其在管道内移动稳定,且可使用多种不同管径的管道内移动。
18、上述技术方案中还包括声呐探头,所述声呐探头沿前后方向置于两个所述走行机构之间,并与所述底盘本体的下端连接。
19、上述技术方案的有益效果在于:如此使得管道内有水时,可由声呐探头对水下情况进行探测。
20、上述技术方案中还包括升降机构,所述摄像头通过所述升降机构安装在所述底盘本体的前上端,所述升降机构用以调节所述摄像头的水平高度。
21、上述技术方案的有益效果在于:如此可通过升降机构调节摄像头在管道内的高低,以在管道内有水时,确保摄像头处于水面上。
技术特征:
1.一种走行机构,其特征在于,包括活动座(111)、滑杆(112)、两个固定座(113)、两个连杆架(114)和两个走行件(115),两个固定座(113)沿前后方向间隔分布,且所述滑杆(112)和活动座(111)均设置在两个所述固定座(113)之前,所述滑杆(112)沿前后方向设置,且其两端分别与两个所述固定座(113)连接,所述滑杆(112)滑动贯穿所述活动座(111),两个所述连杆架(114)均沿前后方向竖向设置在所述滑杆(112)的两侧,所述走行件(115)沿前后方向水平设置在两个所述连杆架(114)之间的下方,且两个所述连杆架(114)的下端分别与所述走行件(115)的两侧的连接,两个所述连杆架(114)的上方分别与所述活动座(111)和两个固定座(113)的对应侧连接,所述活动座(111)前后移动以由两个所述连杆架(114)带动所述走行件(115)上下移动。
2.根据权利要求1所述的走行机构,其特征在于,所述走行件(115)为电动履带式走行总成。
3.根据权利要求1或2所述的走行机构,其特征在于,所述连杆架(114)包括第一连杆(1141)、第二连杆(1142)、第三连杆(1143)、第四连杆(1144)和第五连杆(1145),所述第一连杆(1141)、第二连杆(1142)、第三连杆(1143)和第四连杆(1144)均竖向设置,所述第五连杆(1145)沿前后方向设置,所述第一连杆(1141)的上端位于所述第二连杆(1142)的下方,且所述第一连杆(1141)和第二连杆(1142)相互靠近的一端均与所述第五连杆(1145)的后端竖向摆转连接,所述第二连杆(1142)的上端与位于后方所述固定座(113)的对应侧前后摆转连接,所述第一连杆(1141)的下端与所述走行件(115)对应侧的后端前后摆转连接,且所述第三连杆(1143)的上端与所述活动座(111)的对应侧前后摆转连接,所述第三连杆(1143)的下端与所述走行件(115)对应侧的前端前后摆转连接,所述第四连杆(1144)的上端与位于前方的所述固定座(113)的对应侧前后摆转连接,所述第四连杆(1144)的下端和第五连杆(1145)的前端均与所述第三连杆(1143)长度方向对应的中部竖向摆转连接,所述活动座(111)前后移动以由两根所述第三连杆(1143)带动对应所述连杆架(114)竖向同步展开或收缩以带动所述走行件(115)上下移动。
4.一种管道机器人底盘,其特征在于,包括底盘本体(12)、直线模组(13)和两个如权利要求1-3任一项所述的走行机构(11),所述直线模组(13)沿前后方向设置在所述底盘本体(12)下端中部,两个所述走行机构(11)均沿前后方向设置在所述底盘本体(12)下方的两侧,且呈“八”字形分布,四个所述固定座(113)均与所述底盘本体(12)的下端连接,并在前后方向呈矩形分布,所述直线模组(13)位于四个所述固定座(113)之间的中部,两个所述活动座(111)均与所述直线模组(13)的驱动端连接,所述直线模组(13)驱动两个所述活动座(111)同步沿前后方向移动。
5.根据权利要求4所述的管道机器人底盘,其特征在于,所述直线模组(13)为丝杆驱动件。
6.根据权利要求4所述的管道机器人底盘,其特征在于,两个所述走行机构(11)之间的夹角为90°-120°。
7.一种管道机器人,其特征在于,包括摄像头(2)和如权利要求4-6任一项所述的管道机器人底盘(1),所述摄像头(2)安装在所述底盘本体(12)的上方,且其摄像部朝前。
8.根据权利要求7所述的管道机器人,其特征在于,还包括声呐探头(3),所述声呐探头(3)沿前后方向置于两个所述走行机构(11)之间,并与所述底盘本体(12)的下端连接。
9.根据权利要求7或8所述的管道机器人,其特征在于,还包括升降机构(4),所述摄像头(2)通过所述升降机构(4)安装在所述底盘本体(12)的前上端,所述升降机构(4)用以调节所述摄像头(2)的水平高度。
技术总结
本发明公开了一种走行机构、管道机器人底盘及管道机器人,走行机构包括活动座、滑杆、两个固定座、两个连杆架和两个走行件,两个固定座沿前后方向间隔分布,滑杆沿前后方向设置,且其两端分别与两个固定座连接,滑杆滑动贯穿活动座,两个连杆架均沿前后方向竖向设置在滑杆的两侧,走行件沿前后方向水平设置在两个连杆架之间的下方,且两个连杆架的下端分别与走行件的两侧的连接,两个连杆架的上方分别与活动座和两个固定座的对应侧连接,活动座前后移动以由两个连杆架带动走行件上下移动,其结构简单,且活动座在相对于滑杆前后滑移时可通过带动两个连杆件收缩或展开以调节对于的走行件相对于滑杆上下移动。
技术研发人员:王殿常,贾伯阳,王超
受保护的技术使用者:长江生态环保集团有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!