一种用于商用车AMT的车辆控制方法及装置与流程
本申请涉及汽车,尤其涉及一种用于商用车amt的车辆控制方法及装置。
背景技术:
1、目前,商用车多数安装电控机械式自动变速器(automatedmechanicaltransmission,amt),amt能够依据与选挡、换挡、插分挡、范围挡分别对应的位置传感器反馈的位置值对当前挡位记性判断。
2、在商用车实际驾驶使用场景中,伴随着车辆使用时长增加,司机可以根据车辆保养习惯或实际车况,对车辆的保养,维护挡位相关的位置传感器。若司机因未及时保养车辆或突发性地,在车辆行驶过程中位置传感器故障,商用车可能出现换挡错误,使得正常行驶中的车辆失去动力,威胁到车内人员或车辆附近人员的生命安全。
技术实现思路
1、本申请实施例提供了一种用于商用车amt的车辆控制方法及装置,用于解决商用车amt内部的位置传感器出现故障,将导致车辆失去动力,影响车辆驾驶体验,甚至威胁车辆使用者或相关人员的人身安全的问题。
2、一方面,本申请实施例提供了一种用于商用车amt的车辆控制方法,该方法包括:
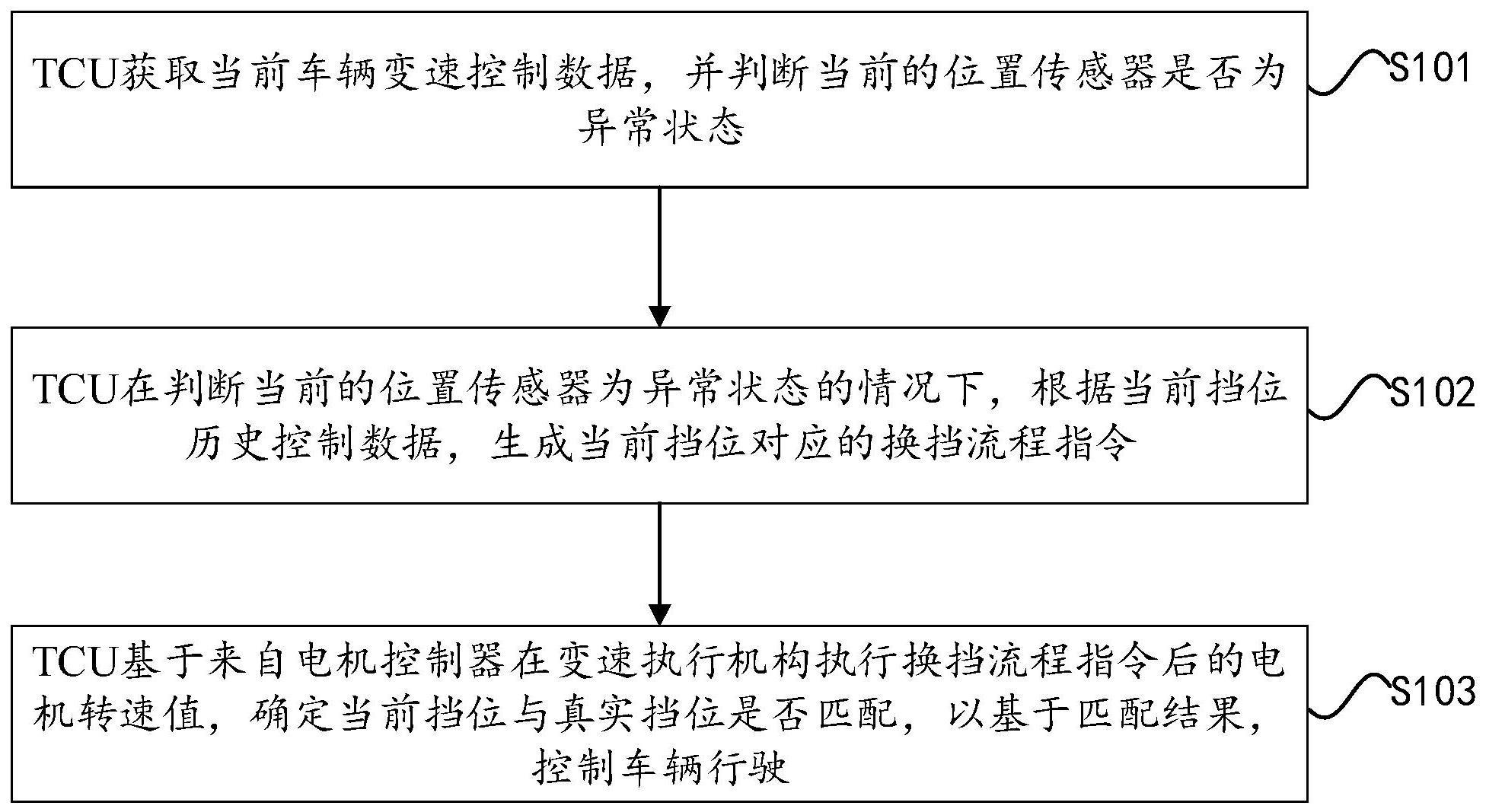
3、自动变速箱控制单元tcu获取当前车辆变速控制数据,并判断当前的位置传感器是否为异常状态;
4、若是,根据当前挡位历史控制数据,生成当前挡位对应的换挡流程指令;
5、基于来自电机控制器在变速执行机构执行所述换挡流程指令后的电机转速值,确定所述当前挡位与真实挡位是否匹配,以基于匹配结果,控制车辆行驶。
6、在本申请的一种实现方式中,所述当前车辆变速控制数据至少包括:换挡状态、需求挡位、换挡指令执行信息、所述位置传感器的反馈位置值;所述需求挡位基于车辆状态确定的;所述车辆状态至少包括以下一项或多项:动力经济模式、加速踏板开度、制动踏板开度、车速、手柄信号、载重状态、外部环境状态。
7、在本申请的一种实现方式中,获取当前车辆变速控制数据,并判断当前的位置传感器是否为异常状态,具体包括:
8、将所述当前车辆变速控制数据分别与相应的异常验证条件匹配;其中,所述异常验证条件至少包括:所述换挡状态不处于换挡中状态、所述需求挡位不等于空挡且未进入换挡状态、所述变速执行机构无驱动指令、所述反馈位置值未处于预置位置值区间;
9、在相应的匹配结果均为匹配成功的情况下,确定当前的所述位置传感器为异常状态。
10、在本申请的一种实现方式中,所述方法还包括:
11、在判断当前的所述位置传感器为异常状态的情况下,获取所述异常状态对应的前一时刻的所处挡位,为当前挡位;
12、确定所述变速执行机构将挡位置入所述当前挡位的控制数据,为所述当前挡位历史控制数据;所述当前挡位历史控制数据至少包括所述变速执行机构各挡位控制阀的执行操作数据。
13、在本申请的一种实现方式中,根据当前挡位历史控制数据,生成当前挡位对应的换挡流程指令,具体包括:
14、根据所述执行操作数据,确定与所述当前挡位对应的各所述挡位控制阀依次的执行操作时间及相应的执行操作;所述执行操作包括对所述挡位控制阀开阀;
15、根据所述执行操作时间及所述执行操作,生成与各所述挡位控制阀对应的执行操作序列,以根据所述执行操作序列,确定所述执行操作序列对应的所述换挡流程指令。
16、在本申请的一种实现方式中,基于来自电机控制器在变速执行机构执行所述换挡流程指令后的电机转速值,确定所述当前挡位与真实挡位是否匹配,具体包括:
17、在所述变速执行机构执行所述换挡流程指令后,获取来自所述电机控制器的所述电机转速值;
18、将所述电机转速值与预设转速比对值比对,以根据比对结果,确定所述当前挡位与真实挡位是否匹配;所述转速比对值基于第一参数、所述当前挡位对应的传动比、主减速比、轮胎半径及第二参数计算得到;所述第一参数对应于车速;所述第二参数用于转换转速的运算单位。
19、在本申请的一种实现方式中,所述方法还包括:
20、在所述电机转速值小于或等于所述转速比对值的情况下,确定所述当前挡位与所述真实挡位匹配,并将所述当前挡位作为所述真实挡位。
21、在本申请的一种实现方式中,所述方法还包括:
22、在所述电机转速值大于所述转速比对值的情况下,实时获取来自转速传感器的输出轴转速值;
23、根据实时的所述电机转速值与所述输出轴转速值的比值,分别确定预设时间段内,所述比值与预设传动比序列中的各元素值的差值曲线;所述传动比序列基于多个挡位的传动比生成;所述差值曲线的纵坐标为所述比值与所述元素值的差值,横坐标为时间;
24、基于各所述差值曲线的曲线斜率、曲线值及相应的预设差值区间,确定与所述当前挡位对应的真实挡位。
25、在本申请的一种实现方式中,基于各所述差值曲线的曲线斜率、曲线值及相应的预设差值区间,确定与所述当前挡位对应的真实挡位,具体包括:
26、在所述预设时间段内,所述差值曲线的所述曲线斜率小于预设值且所述曲线值在所述差值区间内的情况下,根据所述传动比序列,确定所述差值曲线对应的挡位,为所述真实挡位。
27、另一方面,本申请实施例还提供了一种用于商用车amt的车辆控制装置,所述装置包括:
28、判断模块,用于自动变速箱控制单元tcu获取当前车辆变速控制数据,并判断当前的位置传感器是否为异常状态;
29、生成模块,用于若是,根据当前挡位历史控制数据,生成当前挡位对应的换挡流程指令;
30、确定模块,用于基于来自电机控制器在变速执行机构执行所述换挡流程指令后的电机转速值,确定所述当前挡位与真实挡位是否匹配,以基于匹配结果,控制车辆行驶。
31、本申请通过上述方案,能够进行位置传感器异常的判断,并在异常的情况下,使变速执行机构按照异常状态下的换挡流程指令,进行执行控制挡位相关操作,避免车辆行驶中因位置传感器异常导致的脱挡问题。其次,能够对当前挡位的真实性进行确定,保证当前挡位判断的准确性。而且,本申请在发生位置传感器异常时,将禁止车辆进入正常情况下的换挡流程,能够进一步保证车辆不会发生动力中断的问题。从而解决商用车amt内部的位置传感器出现故障,将导致车辆失去动力,影响车辆驾驶体验,甚至威胁车辆使用者或相关人员的人身安全的问题。
32、此外,tcu能够基于电机实际转速的高低,对当前挡位进行分类判断,避免车辆电机实际转速在低速情况下转速传感器不准带来的判断失误,以及保证在高速情况下利用电机实际转速及输出轴转速进行挡位判断的准确度。
技术特征:
1.一种用于商用车amt的车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种用于商用车amt的车辆控制方法,其特征在于,所述当前车辆变速控制数据至少包括:换挡状态、需求挡位、换挡指令执行信息、所述位置传感器的反馈位置值;所述需求挡位基于车辆状态确定的;所述车辆状态至少包括以下一项或多项:动力经济模式、加速踏板开度、制动踏板开度、车速、手柄信号、载重状态、外部环境状态。
3.根据权利要求2所述的一种用于商用车amt的车辆控制方法,其特征在于,获取当前车辆变速控制数据,并判断当前的位置传感器是否为异常状态,具体包括:
4.根据权利要求1所述的一种用于商用车amt的车辆控制方法,其特征在于,所述方法还包括:
5.根据权利要求4所述的一种用于商用车amt的车辆控制方法,其特征在于,根据当前挡位历史控制数据,生成当前挡位对应的换挡流程指令,具体包括:
6.根据权利要求1所述的一种用于商用车amt的车辆控制方法,其特征在于,基于来自电机控制器在变速执行机构执行所述换挡流程指令后的电机转速值,确定所述当前挡位与真实挡位是否匹配,具体包括:
7.根据权利要求6所述的一种用于商用车amt的车辆控制方法,其特征在于,所述方法还包括:
8.根据权利要求6所述的一种用于商用车amt的车辆控制方法,其特征在于,所述方法还包括:
9.根据权利要求8所述的一种用于商用车amt的车辆控制方法,其特征在于,基于各所述差值曲线的曲线斜率、曲线值及相应的预设差值区间,确定与所述当前挡位对应的真实挡位,具体包括:
10.一种用于商用车amt的车辆控制装置,其特征在于,所述装置包括:
技术总结
本申请提供了一种用于商用车AMT的车辆控制方法及装置,属于汽车技术领域。该方法自动变速箱控制单元TCU获取当前车辆变速控制数据,并判断当前的位置传感器是否为异常状态。在判断当前的位置传感器为异常状态的情况下,根据当前挡位历史控制数据,生成当前挡位对应的换挡流程指令。基于来自电机控制器在变速执行机构执行换挡流程指令后的电机转速值,确定当前挡位与真实挡位是否匹配,以基于匹配结果,控制车辆行驶。通过上述方案,解决商用车AMT内部的位置传感器出现故障,将导致车辆失去动力,影响车辆驾驶体验,甚至威胁车辆使用者或相关人员的人身安全的问题。
技术研发人员:姜良超,邓金涛,齐向超,吕文香,耿鑫
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!