一种实现负载的旋转及平移运动协同控制的装置及方法与流程
本发明属于运动控制机械设备,尤其涉及一种实现负载的旋转及平移运动协同控制的装置及方法。
背景技术:
1、在拍摄视频的过程中经常会使用能驱动摄像机平移运动和旋转运动的装置,从而实现理想的拍摄效果,另外市场上还有一类极坐标3d打印机,这类3d打印机包括一个打印平台,也会设计类似的装置来实现打印平台的旋转运动与平移运动的协同控制。目前现有的这类装置一般包含导向组件、滑动组件、安装在滑动组件上的旋转组件、控制板及电源组成,所述摄像头或所述3d打印平台等负载被安装在旋转组件上,一般会在导向组件上安装一个转动源驱动滑动组件在导向组件上做平移运动,另外会在滑动组件上安装另一个转动源驱动旋转组件做旋转运动,最终实现安装在旋转组件上的负载的平移运动和旋转运动的协同控制。要实现分别安装在导向组件和滑动组件上的2个转动源的协同控制,电源必须同时给2个转动源供电,并且通过控制板同时控制2个转动源,解决供电及控制信号传输的现有技术方案包括:其一可在所述的滑动组件和导向组件设置电刷组件来实现供电及控制信号的传输,如中国专利申请cn210106974u描述的设计;其二可在所述导向组件和滑动组件上设置可随着滑动组件运动而折叠或展开的供电及传输控制信号的电线束。
2、在实现本发明过程中,发明人发现,现有技术将转动源设置在滑动组件上,并通过电刷组件或可折叠的电线束实现供电或控制信号传输的技术方案将导致如下问题:
3、(1)在滑动组件上安装重量较大的转动源,会使整个滑动组件的重量较大,同时滑动组件的惯量也较大,导致整个装置的负载能力较小;
4、(2)在滑动组件上安装转动源,并在滑动组件与导向组件之间设计相对复杂的电连接关系,需要较大的生产成本,并且滑动组件与导向组件之间的电连接关系的可靠性相对较低。
技术实现思路
1、发明目的:本发明所要解决的技术问题是针对现有技术的不足,提供一种实现负载的旋转及平移运动协同控制的装置及方法。
2、为了解决上述技术问题,第一方面,公开了一种实现负载的旋转及平移运动协同控制的装置,包括导向组件、第一滑动组件和第一同步带,所述导向组件与第一滑动组件滑动连接,所述第一滑动组件包括旋转组件与滑块,所述旋转组件与所述第一滑动组件的滑块转动连接,所述旋转组件与第一同步带传动连接;所述导向组件包括转动源机构,所述转动源机构与第一同步带传动连接;所述转动源机构通过所述第一同步带驱动旋转组件的旋转和/或平移,从而实现安装在旋转组件上的负载的旋转和/或平移。所述负载可以是摄像机或3d打印机的打印平台等。
3、进一步地,所述旋转组件包括用于输出旋转运动的同步带轮,所述第一同步带与所述用于输出旋转运动的同步带轮传动连接,所述转动源机构通过所述第一同步带驱动所述用于输出旋转运动的同步带轮的旋转和/或平移。
4、进一步地,所述导向组件的一端部包括第一同步带轮组与第三同步带轮组,所述导向组件的另一端部包括第二同步带轮组与第四同步带轮组。即第一同步带轮组与第三同步带轮组的安装位置,与第二同步带轮组与第四同步带轮组的安装位置相对。滑块上设置有零个以上的惰轮同步带轮,所述零个以上的惰轮同步带轮和用于输出旋转运动的同步带轮组成第五同步带轮组;所述的第一同步带为首尾相连的闭口同步带,所述第一同步带与所述的第一同步带轮组、第二同步带轮组、第三同步带轮组、第四同步带轮组和第五同步带轮组按顺序接触连接构成第一闭环传动系统,所述第一闭环传动系统中同步带轮组的排列顺序为:第一同步带轮组、第五同步带轮组、第三同步带轮组、第四同步带轮组、第五同步带轮组和第二同步带轮组。
5、进一步地,所述转动源机构设置于导向组件的端部,包括第一转动源组和第二转动源组,所述第一转动源组和第二转动源组分别包括1个以上的转动源,所述第一转动源组与所述第三同步带轮组连接和/或与第四同步带轮组连接,所述的第二转动源组与所述第一同步带轮组连接和/或与第二同步带轮组连接。
6、进一步地,所述导向组件还包括控制板,所述控制板与所述转动源电连接。
7、进一步地,所述导向组件还包括电源,所述电源与所述控制板电连接。
8、进一步地,所述导向组件端部还安装有控制面板,所述控制面板与所述控制板电连接。
9、进一步地,所述导向组件还包括导轨,所述导轨为中空结构,所述电源为长条结构,所述电源嵌入安装在导轨内部。
10、进一步地,所述旋转组件还包括安装平台;所述用于输出旋转运动的同步带轮与所述安装平台直接连接,或者所述用于输出旋转运动的同步带轮与所述安装平台为一个整体,或者所述用于输出旋转运动的同步带轮与所述安装平台通过变速机构连接。
11、进一步地,所述导向组件上设有至少3个支撑腿,所述支撑腿包括可折叠支撑腿和/或可变长度支撑腿,所述可变长度支撑腿可用于调节整个装置的水平及稳定放置。
12、进一步地,所述实现负载的旋转及平移运动协同控制的装置还包括第二滑动组件和第二同步带,所述第二滑动组件与导向组件滑动连接,所述第二同步带分别与第一滑动组件和第二滑动组件固定连接,所述第二同步带与所述导向组件的两端分别连接。
13、进一步地,所述导向组件的两端安装有第六同步带轮组和第七同步带轮组,所述第二同步带分别与第六同步带轮组和第七同步带轮组接触连接。
14、进一步地,所述第二同步带与所述的第一滑动组件、第二滑动组件、第六同步带轮组和第七同步带轮组按一定顺序连接构成第二闭环传动系统,所述第二闭环传动系统中闭环连接的排列顺序为:第一滑动组件,第六同步带轮组,第二滑动组件,第七同步带轮组。
15、进一步地,所述第二滑动组件设有与支撑装置的连接接口,所述支撑装置可以是三脚架等,采用支撑装置连接第二滑动组件的技术方案相比没有第二滑动组件的技术方案,第一滑动组件可以获得双倍的滑动行程。
16、第二方面,公开了一种实现负载的旋转及平移运动协同控制的方法,用于控制上述实现负载的旋转及平移运动协同控制的装置,控制所述第一转动源组及第二转动源组的输出轴以各自的速度和方向转动,实现安装在旋转组件上的负载的旋转和/或平移。
17、有益效果:相比现有的技术方案,本发明所述的实现负载的旋转及平移运动协同控制的装置及方法,所有所述的转动源均安装在导向组件上,带来如下有益效果:
18、(1)未在滑动组件上安装转动源,降低滑动组件的重量,同时降低滑动组件的惯量,相对现有技术能增加整个装置的负载能力;
19、(2)未在滑动组件上安装转动源,不需要在滑动组件与导向组件之间设计相对复杂的电连接关系,相对现有技术能够降低生产成本,同时能避免在滑动组件与导向组件之间设置不可靠的电连接关系。
技术特征:
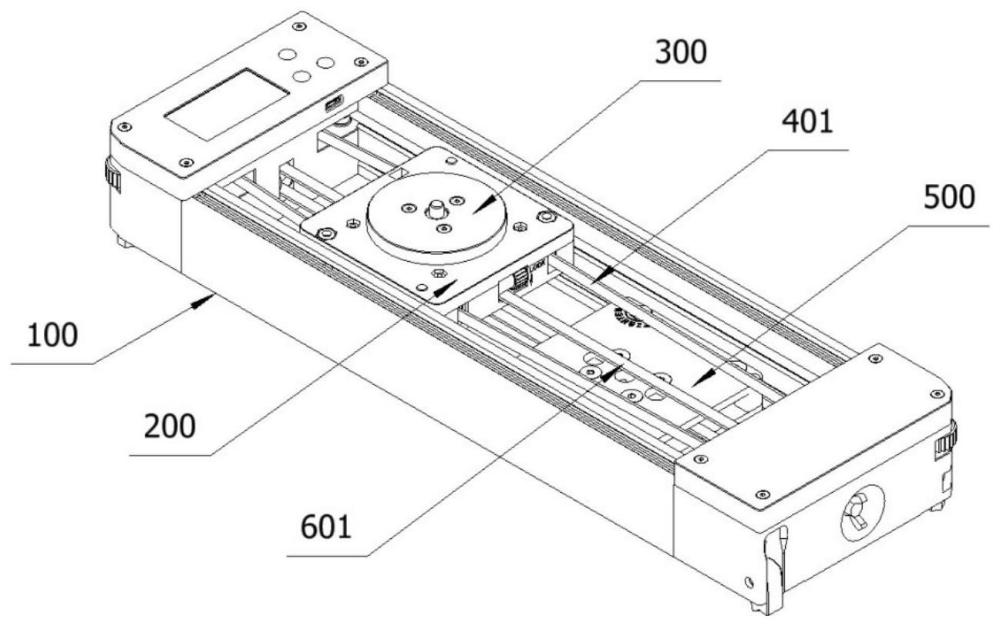
1.一种实现负载的旋转及平移运动协同控制的装置,其特征在于,包括导向组件(100)、第一滑动组件(200)、第一同步带(401),所述导向组件(100)与第一滑动组件(200)滑动连接,所述第一滑动组件(200)包括旋转组件(300)与滑块(210),所述旋转组件(300)与所述滑块(210)转动连接,所述旋转组件(300)与第一同步带(401)传动连接;所述导向组件(100)包括转动源机构(123),所述转动源机构(123)与第一同步带(401)传动连接;所述转动源机构(123)通过所述第一同步带(401)驱动旋转组件(300)的旋转和/或平移。
2.根据权利要求1所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述旋转组件(300)包括用于输出旋转运动的同步带轮(451),所述第一同步带(401)与所述用于输出旋转运动的同步带轮(451)传动连接,所述转动源机构(123)通过所述第一同步带(401)驱动所述用于输出旋转运动的同步带轮(451)的旋转和/或平移。
3.根据权利要求2所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)的一端部包括第一同步带轮组(410)与第三同步带轮组(430),所述导向组件(100)的另一端部包括第二同步带轮组(420)与第四同步带轮组(440),滑块(210)上设置有零个以上的惰轮同步带轮(452),所述零个以上的惰轮同步带轮和用于输出旋转运动的同步带轮(451)组成第五同步带轮组(450);所述的第一同步带(401)为首尾相连的闭口同步带,所述第一同步带(401)与所述的第一同步带轮组(410)、第二同步带轮组(420)、第三同步带轮组(430)、第四同步带轮组(440)和第五同步带轮组(450)按顺序接触连接构成第一闭环传动系统,所述第一闭环传动系统中同步带轮组的排列顺序为:第一同步带轮组(410)、第五同步带轮组(450)、第三同步带轮组(430)、第四同步带轮组(440)、第五同步带轮组(450)和第二同步带轮组(420)。
4.根据权利要求3所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述转动源机构(123)设置于导向组件(100)的端部,包括第一转动源组(121)和第二转动源组(122),所述第一转动源组(121)和第二转动源组(122)分别包括1个以上的转动源(120),所述第一转动源组(121)与所述第三同步带轮组(430)连接和/或与第四同步带轮组(440)连接,所述的第二转动源组(122)与所述第一同步带轮组(410)连接和/或与第二同步带轮组(420)连接。
5.根据权利要求4所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)还包括控制板(130),所述控制板(130)与所述转动源(120)电连接。
6.根据权利要求5所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)还包括电源(112),所述电源(112)与所述控制板(130)电连接。
7.根据权利要求6所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)端部还安装有控制面板(140),所述控制面板(140)与所述控制板(130)电连接。
8.根据权利要求7所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)还包括导轨(111),所述导轨(111)为中空结构,所述电源(112)为长条结构,所述电源(112)嵌入安装在导轨(111)内部。
9.根据权利要求2至8任一项所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述旋转组件(300)还包括安装平台(301);所述用于输出旋转运动的同步带轮(451)与所述安装平台(301)直接连接,或者所述用于输出旋转运动的同步带轮(451)与所述安装平台(301)为一个整体,或者所述用于输出旋转运动的同步带轮(451)与所述安装平台(301)通过变速机构连接。
10.根据权利要求9中任一项所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)上设有至少3个支撑腿,所述支撑腿包括可折叠支撑腿(150)和/或可变长度支撑腿(160)。
11.根据权利要求9中任一项所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,还包括第二滑动组件(500)和第二同步带(601),所述第二滑动组件(500)与导向组件(100)滑动连接,所述第二同步带(601)分别与第一滑动组件(200)和第二滑动组件(500)固定连接,所述第二同步带(601)与所述导向组件(100)的两端分别连接。
12.根据权利要求11所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述导向组件(100)的两端安装有第六同步带轮组(602)和第七同步带轮组(604),所述第二同步带(601)分别与第六同步带轮组(602)和第七同步带轮组(604)接触连接。
13.根据权利要求12所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述第二同步带(601)与所述的第一滑动组件(200)、第二滑动组件(500)、第六同步带轮组(602)和第七同步带轮组(604)按顺序连接构成第二闭环传动系统,所述第二闭环传动系统中闭环连接的排列顺序为:第一滑动组件(200)、第六同步带轮组(602)、第二滑动组件(500)和第七同步带轮组(604)。
14.根据权利要求13所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,所述第二滑动组件(500)设有与支撑装置的连接接口(501)。
15.一种实现负载的旋转及平移运动协同控制的方法,用于控制权利要求1到14任一项所述的一种实现负载的旋转及平移运动协同控制的装置,其特征在于,控制第一转动源组(121)及第二转动源组(122)的输出轴以各自的速度和方向转动,实现旋转组件(300)的旋转和/或平移。
技术总结
本发明提供了一种实现负载的旋转及平移运动协同控制的装置及方法,装置包括导向组件、第一滑动组件和第一同步带,导向组件与第一滑动组件滑动连接,第一滑动组件包括旋转组件与滑块,旋转组件与滑块转动连接,旋转组件与第一同步带传动连接,导向组件包括转动源机构,转动源机构与第一同步带传动连接;转动源机构通过第一同步带驱动旋转组件的旋转和/或平移,旋转组件与负载连接,负载可以是摄像机、3D打印机的打印平台等。整个装置能够驱动负载实现旋转及平移运动的协同控制,相较现有技术,因驱动用的转动源均安装在导向组件上,使得电连接关系设计简单,同时能够降低运动部件整体的惯量。
技术研发人员:陈仙云,信莹莹
受保护的技术使用者:陈仙云
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!