一种无线管道检测机器人的制作方法
本发明涉及检测机器人,具体为一种无线管道检测机器人。
背景技术:
1、在现代社会的发展中,管道作为重要的城市建设用具之一,其具有较重要的意义。在功能上有能作为对液体、气体等进行物质运输的通路,对于线路等作为埋藏的安全护具,保护内部的介质良好状态免受外界的干扰。然而在管道使用较长时间之后,其难免会受到损坏,需要对受损处进行维修,由于管道一般较长,内壁某处损坏时需要先对整个管路进行破损处的定位,从外部难以判断内壁的损坏,因此需要用到检测机器人来进入管道内部进行检测。
2、现如今的检测机器人在管道的内部进行移动时,由于管道内部的情况比较复杂,检测机器人有时无法在管道内部沿管道的特定线路直线移动,移动的过程中不太稳定,所记录的行走路程一般大于管路初始端到缺陷处的距离,使得对于管道缺陷处的位置的判别存在较大误差,不利于维修工作的进行。
技术实现思路
1、(一)解决的技术问题
2、本发明的目的在于提供一种无线管道检测机器人以解决上述背景技术中提出的,现如今的检测机器人在管道的内部进行移动时,由于管道内部的情况比较复杂,检测机器人有时无法在管道内部沿管道的特定线路直线移动,移动的过程中不太稳定,所记录的行走路程一般大于管路初始端到缺陷处的距离,使得对于管道缺陷处的位置的判别存在较大误差,不利于维修工作的进行的问题。
3、(二)技术方案
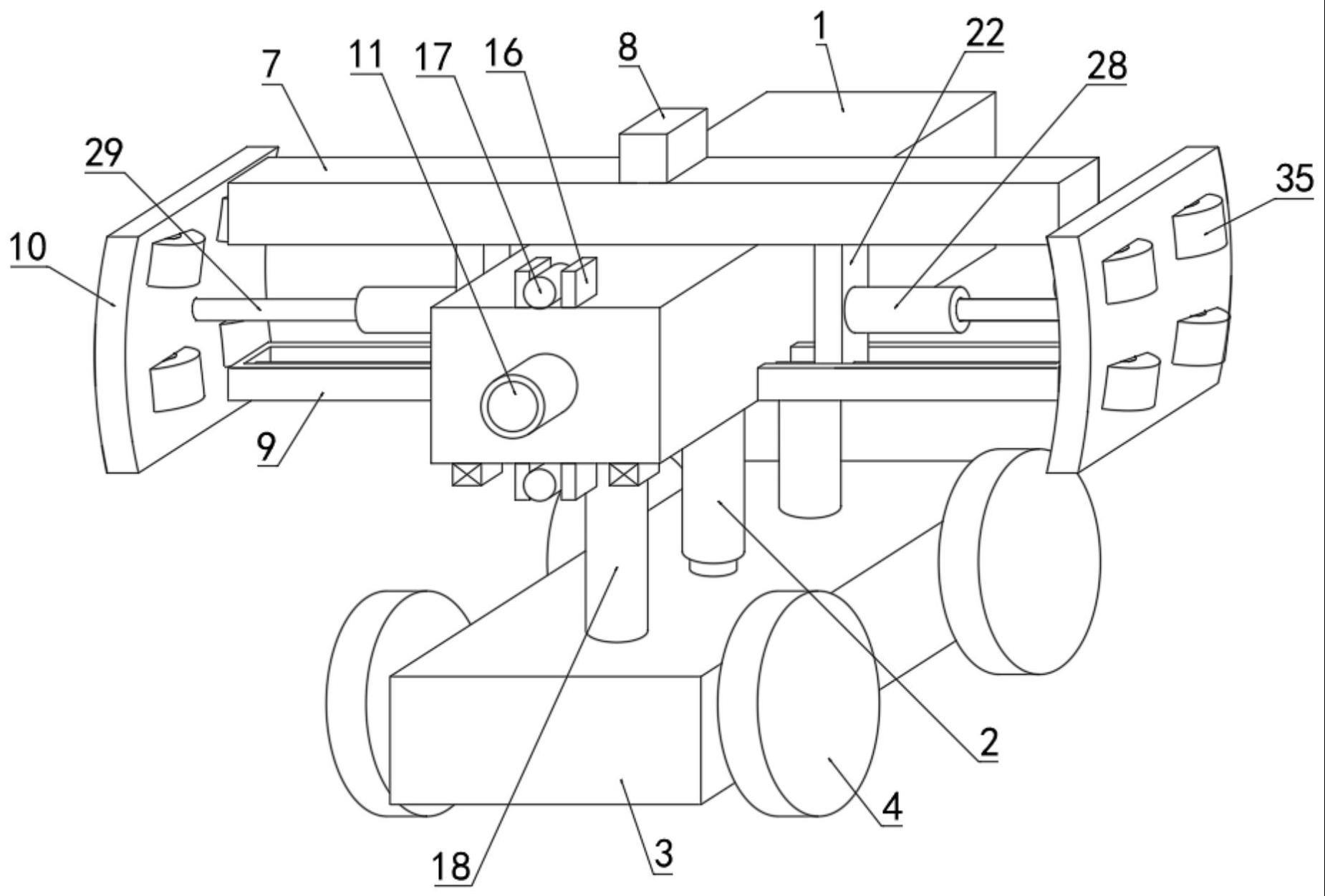
4、为实现上述目的,本发明提供如下技术方案:一种无线管道检测机器人,包括组件箱,所述组件箱的底侧中部固定安装有电动伸缩杆,所述电动伸缩杆的活动端固定安装有行走车,所述行走车的两侧安装有行走轮,所述组件箱的内侧顶部固定安装有视觉里程计,所述行走轮上设置有轮速计,所述组件箱的上端中部固定安装有长体箱,所述长体箱的上端中部固定安装有固定箱,所述组件箱的左右两侧面上的底部对称固定安装有矩形块,所述组件箱的左右两侧对称设置有弧形推送板,所述组件箱的前端固定安装有摄像头。
5、优选的,所述组件箱的内侧底部固定安装有电源和控制处理模块,所述组件箱的外侧底端前侧固定安装有信号发射器和信号接收器,所述电源、摄像头、视觉里程计、信号发射器和信号接收器均与控制处理模块电性连接。
6、通过上述技术方案,控制处理模块控制装置中电力元件的工作,通过信号发射器和信号接收器来接发信号,实现远程终端的控制,视觉里程计可以通过图像推算管道长度,确认管道缺陷处的具体位置。
7、优选的,所述行走车的内部安装有驱动行走轮行走的驱动部件,所述轮速计和驱动部件的电路设备均与控制处理模块电性连接。
8、通过上述技术方案,由控制处理模块控制行走车进行移动,轮速计能够根据检测行走轮在一定时间内行走的距离来推算出管路缺陷的具体位置处,与视觉里程计合作,更加确定具体的位置点。
9、优选的,所述组件箱的上下两端的前侧面上均固定安装有两块固定板,每两块所述固定板之间固定安装有照明灯,两个所述照明灯均与控制处理模块电性连接。
10、通过上述技术方案,上下两个照明灯发出的光源照亮管道内部,利于摄像头对管道内部的情况进行监测。
11、优选的,所述组件箱的底部固定安装有两个导向杆,所述行走车的顶部固定安装有两个导向插筒,且两个所述导向杆分别插入设置在两个导向插筒的内部。
12、通过上述技术方案,行走车在管道内部的下端面,启动电动伸缩杆推动组件箱向上,使组件箱的中心与管道的中心一致,导向杆在导向插筒内移动,保持组件箱和行走车之间的连接稳定性。
13、优选的,所述长体箱的内侧左右两端对称转动安装有两个转动杆,两个所述转动杆相对远离的一端外侧对称设置有旋转方向相反的螺纹,所述长体箱的底部左右两侧对称开设有两个滑动槽,两个所述转动杆的螺纹段外侧对称螺纹连接有移动板。
14、通过上述技术方案,两个转动杆转动时,带动两个移动板相对靠近或者相对远离的运动。
15、优选的,两个所述转动杆相对靠近的一端分别固定安装有锥齿轮一,所述固定箱的内部固定安装有电机,所述电机的输出轴穿过长体箱的上壁且固定安装有锥齿轮二,所述锥齿轮二分别和两个锥齿轮一啮合连接,所述电机和控制处理模块电性连接。
16、通过上述技术方案,启动电机带动锥齿轮二转动,从而带动两个啮合的锥齿轮一进行转动,继而带动两个转动杆转动。
17、优选的,两个所述矩形块的上侧均开设有凹槽,两个所述凹槽内均固定安装有固定杆,两个所述移动板的下端分别穿过两个滑动槽且分别活动套设在两个固定杆的外侧。
18、通过上述技术方案,两个移动板相对运动时,底部同时分别在两个固定杆的外侧滑行,使得两个移动板的移动更加平稳。
19、优选的,两个所述移动板相对远离的一端均固定安装有套筒,两个所述套筒内相对靠近的一侧壁上均固定安装有压缩弹簧,两个所述压缩弹簧相对远离的一端均固定安装有限位块,两个所述限位块相对远离的一端均固定安装有推杆,两个所述推杆相对远离的一端分别穿出套筒且固定安装在两个弧形推送板上。
20、通过上述技术方案,当两个移动板相对远离运动时,推动两个套筒相对远离运动,两个弧形推送板分别与管道的内壁左右端接触,两个推杆向对应的套筒内收缩,压缩弹簧进一步压缩,使得两个弧形推送板上的各个弹性橡胶轮和管道内壁平稳接触,同时弹性橡胶轮可以跟随行走车的移动而在管道内壁上滚动,保持整个装置能够在管道内平稳的向前移动,装置本身可以在一定直径范围内的管道中使用。
21、优选的,两块所述弧形推送板上均对称开设有四个穿槽,每个所述穿槽内均固定安装有固定柱,所述固定柱的外侧均活动套设有钢圈,每个所述钢圈的外侧均固定安装有弹性橡胶轮。
22、通过上述技术方案,弹性橡胶轮跟随行走车的移动而在管道内壁上滚动,保持装置在管道内直线运动,从而测算的行走路程更加准确,对管道内壁缺陷处的判断更加精确。
23、与现有技术相比,本发明提供了一种无线管道检测机器人,具备以下有益效果:
24、本发明通过设置组件箱、电动伸缩杆、行走车、视觉里程计、轮速计、长体箱、固定箱、矩形块、弧形推送板、摄像头、照明灯、转动杆、移动板、套筒、推杆、固定柱、钢圈、弹性橡胶轮等,能够根据不同的内径的管道,启动电动伸缩杆调整组件箱的位置高度,启动电机调整两块弧形推送板之间的距离,弧形推送板上弹性橡胶轮与管道内壁的充分接触,在推动行走车向内移动时在管道内壁上滚动,使装置在管道内充分的展开,控制装置沿管道路线的直线行驶,在管道内更加平稳的向内推进,记录的行驶线路呈直线,有利于记录的路线长度符合管道初始端到缺陷位置处的长度,从而视觉里程计通过图像推算管道长度,确认管道缺陷处的具体位置,轮速计根据检测行走轮在一定时间内行走的距离来推算出管路缺陷的具体位置处,两者相互配合,更加精确的判断管道的缺陷位置,便于工作人员进行维修工作。
技术特征:
1.一种无线管道检测机器人,包括组件箱(1),其特征在于:所述组件箱(1)的底侧中部固定安装有电动伸缩杆(2),所述电动伸缩杆(2)的活动端固定安装有行走车(3),所述行走车(3)的两侧安装有行走轮(4),所述组件箱(1)的内侧顶部固定安装有视觉里程计(5),所述行走轮(4)上设置有轮速计(6),所述组件箱(1)的上端中部固定安装有长体箱(7),所述长体箱(7)的上端中部固定安装有固定箱(8),所述组件箱(1)的左右两侧面上的底部对称固定安装有矩形块(9),所述组件箱(1)的左右两侧对称设置有弧形推送板(10),所述组件箱(1)的前端固定安装有摄像头(11)。
2.根据权利要求1所述的一种无线管道检测机器人,其特征在于:所述组件箱(1)的内侧底部固定安装有电源(12)和控制处理模块(13),所述组件箱(1)的外侧底端前侧固定安装有信号发射器(14)和信号接收器(15),所述电源(12)、摄像头(11)、视觉里程计(5)、信号发射器(14)和信号接收器(15)均与控制处理模块(13)电性连接。
3.根据权利要求2所述的一种无线管道检测机器人,其特征在于:所述行走车(3)的内部安装有驱动行走轮(4)行走的驱动部件,所述轮速计(6)和驱动部件的电路设备均与控制处理模块(13)电性连接。
4.根据权利要求3所述的一种无线管道检测机器人,其特征在于:所述组件箱(1)的上下两端的前侧面上均固定安装有两块固定板(16),每两块所述固定板(16)之间固定安装有照明灯(17),两个所述照明灯(17)均与控制处理模块(13)电性连接。
5.根据权利要求1所述的一种无线管道检测机器人,其特征在于:所述组件箱(1)的底部固定安装有两个导向杆(19),所述行走车(3)的顶部固定安装有两个导向插筒(18),且两个所述导向杆(19)分别插入设置在两个导向插筒(18)的内部。
6.根据权利要求4所述的一种无线管道检测机器人,其特征在于:所述长体箱(7)的内侧左右两端对称转动安装有两个转动杆(20),两个所述转动杆(20)相对远离的一端外侧对称设置有旋转方向相反的螺纹,所述长体箱(7)的底部左右两侧对称开设有两个滑动槽(21),两个所述转动杆(20)的螺纹段外侧对称螺纹连接有移动板(22)。
7.根据权利要求6所述的一种无线管道检测机器人,其特征在于:两个所述转动杆(20)相对靠近的一端分别固定安装有锥齿轮一(23),所述固定箱(8)的内部固定安装有电机(24),所述电机(24)的输出轴穿过长体箱(7)的上壁且固定安装有锥齿轮二(25),所述锥齿轮二(25)分别和两个锥齿轮一(23)啮合连接,所述电机(24)和控制处理模块(13)电性连接。
8.根据权利要求7所述的一种无线管道检测机器人,其特征在于:两个所述矩形块(9)的上侧均开设有凹槽(26),两个所述凹槽(26)内均固定安装有固定杆(27),两个所述移动板(22)的下端分别穿过两个滑动槽(21)且分别活动套设在两个固定杆(27)的外侧。
9.根据权利要求8所述的一种无线管道检测机器人,其特征在于:两个所述移动板(22)相对远离的一端均固定安装有套筒(28),两个所述套筒(28)内相对靠近的一侧壁上均固定安装有压缩弹簧(31),两个所述压缩弹簧(31)相对远离的一端均固定安装有限位块(30),两个所述限位块(30)相对远离的一端均固定安装有推杆(29),两个所述推杆(29)相对远离的一端分别穿出套筒(28)且固定安装在两个弧形推送板(10)上。
10.根据权利要求1所述的一种无线管道检测机器人,其特征在于:两块所述弧形推送板(10)上均对称开设有四个穿槽(32),每个所述穿槽(32)内均固定安装有固定柱(33),所述固定柱(33)的外侧均活动套设有钢圈(34),每个所述钢圈(34)的外侧均固定安装有弹性橡胶轮(35)。
技术总结
本发明涉及检测机器人技术领域,且公开了一种无线管道检测机器人,包括组件箱,所述组件箱的底侧中部固定安装有电动伸缩杆,所述电动伸缩杆的活动端固定安装有行走车,所述行走车的两侧安装有行走轮。本发明通过设置各组件,能够根据不同内径的管道做出调整,使装置在管道内充分的展开,控制装置沿管道路线的直线行驶,在管道内更加平稳的向内推进,记录的行驶线路呈直线,符合管道初始端到缺陷位置处的长度,从而视觉里程计通过图像推算管道长度,确认管道缺陷处的具体位置,轮速计根据检测行走轮在一定时间内行走的距离来推算出管路缺陷的具体位置处,两者相互配合,更加精确的判断管道的缺陷位置,便于工作人员进行维修工作。
技术研发人员:孙忆业,张冬军,李悦
受保护的技术使用者:浙江犀通科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!