一种管道行走机器人的制作方法
本发明涉及机器人,尤其涉及一种管道行走机器人。
背景技术:
1、气体、液体的输送管道普遍采用圆形钢管,输送管道长期使用后,如果钢管连接部位以及管底没有得到保养和维护,容易出现锈蚀等问题。而大部分管道埋地敷设,难以从外表检查,因此管道机器人成为最佳选择,但由于管道爬坡、转弯,截面的变化给管道机器人行走带来极大障碍,同时也限制了管道机器人的发展,遂有此发明。
技术实现思路
1、本发明的目的在于提供一种管道行走机器人,其具有良好的过弯能力。
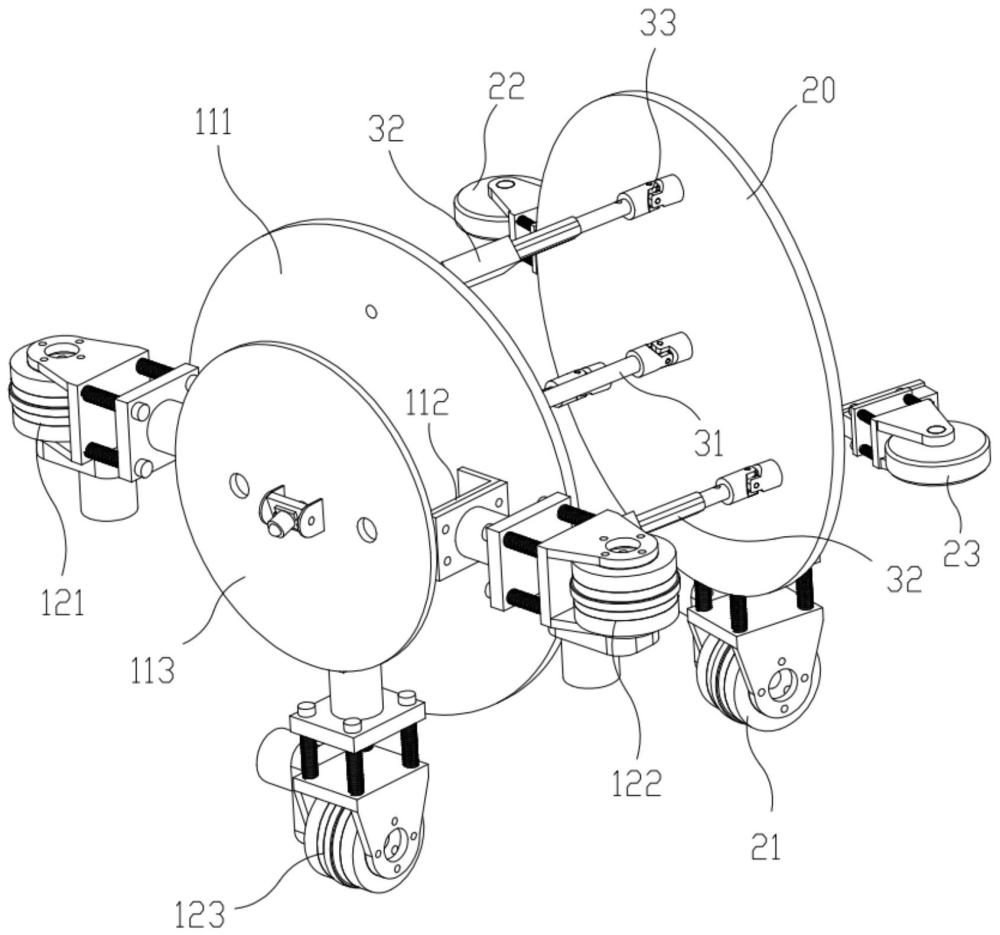
2、为达到上述目的,本发明公开了一种管道行走机器人,其包括控制器、第一行走机构、第二行走机构以及伸缩连接机构;
3、所述第一行走机构和第二行走机构均包括安装座以及至少三滚轮,所述滚轮设置在安装座的外周,所有所述滚轮的轮底位于以所述安装座为圆心的圆周上;至少有一个所述滚轮为磁轮,且至少有一个所述磁轮传动连接有驱动件,所述驱动件连接控制器;
4、所述伸缩连接机构包括连轴以及至少三组伸缩杆,所述伸缩杆连接控制器;所述连轴的一端转动连接第一行走机构对应的安装座中心,所述连轴的另一端转动连接第二行走机构对应的安装座中心;所述伸缩杆包括固定部和活动部,所述固定部与第一行走机构对应的安装座转动连接,所述活动部与第二行走机构对应的安装座转动连接;所述第一行走机构对应的安装座与第二行走机构对应的安装座平行时,所述伸缩杆平行于连轴。
5、优选地,还包括用于检测所述滚轮压力的压力传感器,所述压力传感器连接控制器;所述第一行走机构对应的滚轮中包括第一滚轮、第二滚轮和第三滚轮,所述第二行走机构对应的滚轮中包括第四滚轮、第五滚轮和第六滚轮,所述第一行走机构对应的安装座与第二行走机构对应的安装座平行时,所述第三滚轮与第四滚轮位置相互对应;至少所述第一滚轮、第二滚轮、第三滚轮和第四滚轮对应设置有压力传感器。
6、优选地,所述管道行走机器人置于管道内时,所有所述滚轮抵贴管道的内壁,且所述第一滚轮和第二滚轮的连线与管道内圆的水平直径线吻合,所述第三滚轮与管道内圆圆心的连线垂直于管道内圆的水平直径线,所述第五滚轮和第六滚轮的连线与管道内圆的水平直径线吻合,所述第四滚轮与管道内圆圆心的连线垂直于管道内圆的水平直径线;所述第一滚轮、第二滚轮、第三滚轮和第四滚轮均为磁轮,且所述第一滚轮、第二滚轮、第三滚轮和第四滚轮均配置有驱动件并与之传动连接。
7、优选地,还包括与所述滚轮一一对应的缓冲组件,所述安装座上固定有与滚轮一一对应的轮柄,所述滚轮均通过缓冲组件连接轮柄。
8、优选地,所述缓冲组件包括轮架、四根带帽滑杆、四个弹性件和压板,所述带帽滑杆与弹性件一一对应,所述带帽滑杆依次穿过压板和弹性件后连接轮架,所述弹性件压缩于压板和轮架之间;所述压板连接轮柄,所述滚轮转动连接轮架。
9、优选地,还包括用于检测所述滚轮压力的压力传感器,所述压力传感器连接控制器,所述压力传感器嵌装在缓冲组件与轮柄的接触面上。
10、优选地,所述安装座包括支撑圆盘、连接圆盘和至少三个支座,所述支撑圆盘和连接圆盘通过支座连接,所述支座与轮柄一一对应,且所述轮柄连接支座。
11、优选地,视线往正对所述安装座的方向上看,所述滚轮的轮底到安装座中心的距离等于管道内径的0.5~0.51倍。
12、优选地,所述磁轮的周向上还设有至少一圈辅助行走环,所述辅助行走环由具有弹性的隔磁材料制成,所述辅助行走环突出磁轮的轮面1~2mm,所述辅助行走环宽5~7mm。
13、优选地,所述连轴和伸缩杆均通过万向节连接安装座。
14、优选地,所述安装座为圆盘,定义圆盘的直径为n,定义管道的内径为d,定义所述安装座与管道内壁的安全距离为r,定义所述滚轮直径为a,定义所述连轴的长度为l1,定义所述伸缩杆的最大长度为l2max,定义所述伸缩杆的最小长度为l2min,则
15、n=0.4~0.6d,r=0.03~0.1d,
16、,
17、,
18、。
19、本发明具有以下有益效果:
20、1、本发明通过伸缩连接机构连接第一行走机构和第二行走机构,可以形成一个稳定的行走结构,保证机器人在管道内稳定行走。通过控制伸缩杆的伸缩,可以调整第一行走机构和第二行走机构相对位置,给予转弯的导向,同时控制驱动件运转给予行走动力,使得机器人实现转弯行走。另外,通过设置磁轮吸附管壁,可以进一步保证机器人在管道内稳定行走,且磁轮的吸附作用还可以使得机器人进行立向行走。
21、2、机器人在管道内行走时,第一滚轮和第二滚轮处于同一水平,通过设置压力传感器检测滚轮压力,机器人在水平转弯时,第一滚轮和第二滚轮的压力会出现差值变化,机器人在竖直转弯时,第三滚轮和第四滚轮的压力会出现差值变化,通过控制器比对这两组压力差值,进而自动控制伸缩杆的伸缩,实现机器人形态的自适应调整,保证机器人更顺畅地通过弯道。
技术特征:
1.一种管道行走机器人,其特征在于:包括控制器、第一行走机构、第二行走机构以及伸缩连接机构;
2.根据权利要求1所述的管道行走机器人,其特征在于:还包括用于检测所述滚轮压力的压力传感器,所述压力传感器连接控制器;所述第一行走机构对应的滚轮中包括第一滚轮、第二滚轮和第三滚轮,所述第二行走机构对应的滚轮中包括第四滚轮、第五滚轮和第六滚轮,所述第一行走机构对应的安装座与第二行走机构对应的安装座平行时,所述第三滚轮与第四滚轮位置相互对应;至少所述第一滚轮、第二滚轮、第三滚轮和第四滚轮对应设置有压力传感器。
3.根据权利要求2所述的管道行走机器人,其特征在于:所述管道行走机器人置于管道内时,所有所述滚轮抵贴管道的内壁,且所述第一滚轮和第二滚轮的连线与管道内圆的水平直径线吻合,所述第三滚轮与管道内圆圆心的连线垂直于管道内圆的水平直径线,所述第五滚轮和第六滚轮的连线与管道内圆的水平直径线吻合,所述第四滚轮与管道内圆圆心的连线垂直于管道内圆的水平直径线;所述第一滚轮、第二滚轮、第三滚轮和第四滚轮均为磁轮,且所述第一滚轮、第二滚轮、第三滚轮和第四滚轮均配置有驱动件并与之传动连接。
4.根据权利要求1~3任一项所述的管道行走机器人,其特征在于:还包括与所述滚轮一一对应的缓冲组件,所述安装座上固定有与滚轮一一对应的轮柄,所述滚轮均通过缓冲组件连接轮柄。
5.根据权利要求4所述的管道行走机器人,其特征在于:所述缓冲组件包括轮架、四根带帽滑杆、四个弹性件和压板,所述带帽滑杆与弹性件一一对应,所述带帽滑杆依次穿过压板和弹性件后连接轮架,所述弹性件压缩于压板和轮架之间;所述压板连接轮柄,所述滚轮转动连接轮架。
6.根据权利要求4所述的管道行走机器人,其特征在于:还包括用于检测所述滚轮压力的压力传感器,所述压力传感器连接控制器,所述压力传感器嵌装在缓冲组件与轮柄的接触面上。
7.根据权利要求4所述的管道行走机器人,其特征在于:所述安装座包括支撑圆盘、连接圆盘和至少三个支座,所述支撑圆盘和连接圆盘通过支座连接,所述支座与轮柄一一对应,且所述轮柄连接支座。
8.根据权利要求4所述的管道行走机器人,其特征在于:视线往正对所述安装座的方向上看,所述滚轮的轮底到安装座中心的距离等于管道内径的0.5~0.51倍。
9.根据权利要求1所述的管道行走机器人,其特征在于:所述磁轮的周向上还设有至少一圈辅助行走环,所述辅助行走环由具有弹性的隔磁材料制成,所述辅助行走环突出磁轮的轮面1~2mm,所述辅助行走环宽5~7mm。
10.根据权利要求1所述的管道行走机器人,其特征在于:所述安装座为圆盘,定义圆盘的直径为n,定义管道的内径为d,定义所述安装座与管道内壁的安全距离为r,定义所述滚轮直径为a,定义所述连轴的长度为l1,定义所述伸缩杆的最大长度为l2max,定义所述伸缩杆的最小长度为l2min,则
技术总结
本发明涉及一种管道行走机器人,其包括控制器、第一行走机构、第二行走机构以及伸缩连接机构;第一行走机构和第二行走机构均包括安装座以及至少三滚轮,滚轮设置在安装座的外周,所有滚轮的轮底位于以所述安装座为圆心的圆周上;至少有一个滚轮为磁轮,且至少有一个磁轮传动连接有驱动件,驱动件连接控制器;伸缩连接机构包括连轴以及至少三组伸缩杆,伸缩杆连接控制器;连轴和伸缩杆的一端转动连接一安装座,连轴和伸缩杆的另一端转动连接另一安装座;两安装座平行时,伸缩杆平行于连轴,且伸缩杆以连轴为轴心圆周均布。本发明具有良好的管道过弯能力,且能够进行立向行走。
技术研发人员:陈思鑫,刘志杰
受保护的技术使用者:厦门华蔚物联网科技有限公司
技术研发日:
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!