基于三桥臂的双路双向磁轴承悬浮电流控制电路及方法与流程
本发明涉及磁轴承控制,具体的说是基于三桥臂的双路双向磁轴承悬浮电流控制电路和方法。
背景技术:
1、多个磁感应线圈产生的安培力相互配合是磁轴承稳定悬浮的关键,为了在磁感应线圈上产生不同方向的安培力,需要设计多路驱动组件,从而产生不同方向和大小的悬浮电流。目前,专利(cn115733418a)公开了一种基于桥式电路的双向电机电流控制方法,根据给定电流ig的正负,以及eo和δith之间大小关系的不同,控制桥式拓扑电路中mos管q1、mos管q2、mos管q3和mos管q4的通断,进而控制电流的变化量的大小以及方向。但是,该控制方法只能控制一路电流,若想实现两路电流的控制,则需要两个桥式拓扑电路,增大了驱动组件的体积。
技术实现思路
1、为了解决现有技术中的不足,本发明提供基于三桥臂的双路双向磁轴承悬浮电流控制电路及方法,能够输出双路双向磁轴承悬浮电流,且减小了体积以及降低物料成本。
2、为了实现上述目的,本发明采用的具体方案为:一种基于三桥臂的双路双向磁轴承悬浮电流控制电路,包括:控制单元,用于根据上位的给定电流和磁轴承的反馈电流产生八路控制信号;桥臂组件,包括第一桥臂、第二桥臂和复用桥臂,双路磁轴承的绕组对应连接在复用桥臂和第一桥臂之间以及复用桥臂和第二桥臂之间,第一桥臂、复用桥臂和第二桥臂均包括至少两个mos管;第一桥臂中的所有mos管各由一路控制信号控制,第二桥臂中的mos管各由一路控制信号控制,复用桥臂中的所有mos管各由两路控制信号控制;电压源,用于向桥臂组件供电。
3、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制电路的一种优化方案:所述第一桥臂包括串联的mos管q1和mos管q4,复用桥臂包括串联的mos管q2和mos管q5,第二桥臂包括串联的mos管q3和mos管q6,mos管q1和mos管q4之间、mos管q2和mos管q5之间以及mos管q3和mos管q6之间形成用于连接双路磁轴承绕组的连接点,mos管q1、mos管q2和mos管q3的漏极端并联后与电压源的正极端电性连接,mos管q1、mos管q2和mos管q3的源极端分别与mos管q4、mos管q5和mos管q6的漏极端对应连接,mos管q4、mos管q5和mos管q6的源极端并联后与电压源的负极端电性连接,mos管q1、mos管q2、mos管q3、mos管q4、mos管q5和mos管q6的栅极端均与控制单元对应连接。
4、一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,基于上述的一种基于三桥臂的双路双向磁轴承悬浮电流控制电路,所述方法包括如下步骤:
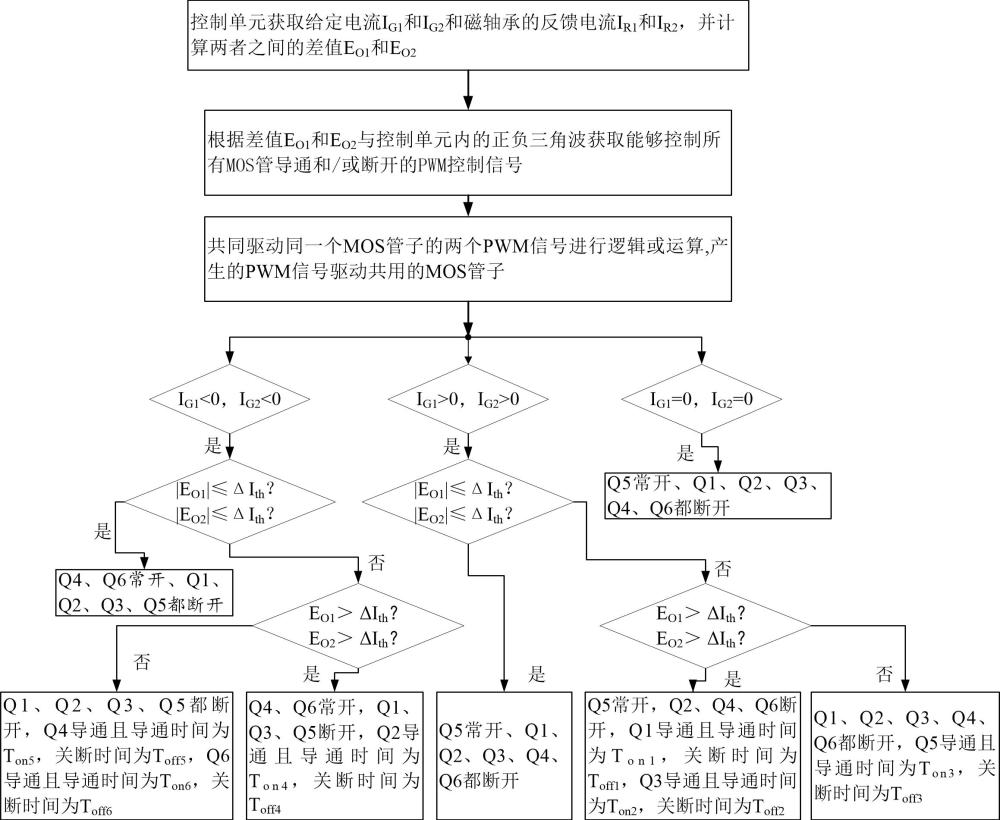
5、控制单元获取给定电流ig1和ig2和磁轴承的反馈电流ir1和ir2,并计算两者之间的差值eo1和eo2。
6、控制单元根据给定电流ig1和ig2的正负以及差值eo1和eo2与预先设定的阈值δith的比较结果对第一桥臂、复用桥臂和第二桥臂进行控制。
7、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的一种优化方案:根据差值eo1和eo2与控制单元内的正负三角波获取能够控制所有mos管导通和/或断开的pwm控制信号;
8、pwm控制信号包括通过eo1与控制单元中的正负三角波得到的pwm1、pwm2、pwm4和pwm5和通过eo2与控制单元中的正负三角波得到的pwm3、pwm6、pwm7和pwm8;
9、其中,pwm1控制mos管q1、pwm2和pwm7控制mos管q2、pwm3控制mos管q3、pwm4控制mos管q4、pwm5和pwm8控制mos管q5、pwm6控制mos管q6。
10、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的另一种优化方案:当ig1>0,ig2>0且|eo1|≤δith,|eo2|≤δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1断开、pwm2和pwm7控制mos管q2断开,pwm4控制mos管q4断开,pwm5和pwm8控制mos管q5常开,pwm3控制mos管q3断开,pwm6控制mos管q6断开。
11、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的另一种优化方案:当ig1>0,ig2>0且eo1>δith,eo2>δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1导通,pwm2和pwm7控制mos管q2断开,pwm4控制mos管q4断开,pwm5和pwm8控制mos管q5常开,pwm3控制mos管q3导通,pwm6控制mos管q6断开。
12、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的另一种优化方案:当ig1>0,ig2>0,且eo1<-δith,eo2<-δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1断开,pwm2和pwm7控制mos管q2断开,pwm3控制mos管q3断开,pwm4控制mos管q4断开,pwm5和pwm8控制mos管q5导通,pwm6控制mos管q6断开。
13、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的另一种优化方案:当ig1<0,ig2<0,且|eo1|≤δith、|eo2|≤δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm4控制mos管q4常开,pwm6控制mos管q6常开,pwm1控制mos管q1断开,pwm2和pwm7控制mos管q2断开,pwm3控制mos管q3断开,pwm5和pwm8控制mos管q5断开。
14、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的另一种优化方案:当ig1<0,ig2<0且eo1>δith、eo2>δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm4控制mos管q4常开,pwm6控制mos管q6常开,pwm1控制mos管q1断开,pwm3控制mos管q3断开,pwm5和pwm8控制mos管q5断开,pwm2和pwm7控制mos管q2导通。
15、作为上述一种基于三桥臂的双路双向磁轴承悬浮电流控制方法的另一种优化方案:当ig1<0,ig2<0且eo1<-δith,eo2<-δith,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1断开,pwm2和pwm7控制mos管q2断开,pwm3控制mos管q3断开,pwm5和pwm8控制mos管q5断开,pwm4控制mos管q4导通,pwm6控制mos管q6导通。
16、与现有技术相比,本发明有如下有益效果:
17、本发明提供了基于三桥臂的双路双向磁轴承悬浮电流控制电路及方法,能够输出双路双向磁轴承悬浮电流,同时,减小产品的体积和降低物料成本。
技术特征:
1.一种基于三桥臂的双路双向磁轴承悬浮电流控制电路,其特征在于,包括:
2.如权利要求1所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制电路,其特征在于:所述第一桥臂包括串联的mos管q1和mos管q4,复用桥臂包括串联的mos管q2和mos管q5,第二桥臂包括串联的mos管q3和mos管q6,mos管q1和mos管q4之间、mos管q2和mos管q5之间以及mos管q3和mos管q6之间形成用于连接双路磁轴承绕组的连接点,mos管q1、mos管q2和mos管q3的漏极端并联后与电压源的正极端电性连接,mos管q1、mos管q2和mos管q3的源极端分别与mos管q4、mos管q5和mos管q6的漏极端对应连接,mos管q4、mos管q5和mos管q6的源极端并联后与电压源的负极端电性连接,mos管q1、mos管q2、mos管q3、mos管q4、mos管q5和mos管q6的栅极端均与控制单元对应连接。
3.一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,该方法基于权利要求2所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制电路,其特征在于,所述方法包括如下步骤:
4.如权利要求3所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:根据差值eo1和eo2与控制单元内的正负三角波获取能够控制所有mos管导通和/或断开的pwm控制信号;
5.如权利要求4所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:当ig1>0,ig2>0且|eo1|≤δith,|eo2|≤δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1断开、pwm2和pwm7控制mos管q2断开,pwm4控制mos管q4断开,pwm5和pwm8控制mos管q5常开,pwm3控制mos管q3断开,pwm6控制mos管q6断开。
6.如权利要求4所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:当ig1>0,ig2>0且eo1>δith,eo2>δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1导通,pwm2和pwm7控制mos管q2断开,pwm4控制mos管q4断开,pwm5和pwm8控制mos管q5常开,pwm3控制mos管q3导通,pwm6控制mos管q6断开。
7.如权利要求4所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:当ig1>0,ig2>0,且eo1<-δith,eo2<-δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm1控制mos管q1断开,pwm3控制mos管q3断开,pwm5和pwm8控制mos管q5导通。
8.如权利要求4所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:当ig1<0,ig2<0,且|eo1|≤δith、|eo2|≤δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm4控制mos管q4常开,pwm6控制mos管q6常开,pwm1控制mos管q1断开,pwm2和pwm7控制mos管q2断开,pwm3控制mos管q3断开,pwm5和pwm8控制mos管q5断开。
9.如权利要求4所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:当ig1<0,ig2<0且eo1>δith、eo2>δith时,在一个控制周期t内,控制单元生成pwm控制信号,pwm4控制mos管q4常开,pwm6控制mos管q6常开,pwm1控制mos管q1断开,pwm3控制mos管q3断开,pwm5和pwm8控制mos管q5断开,pwm2和pwm7控制mos管q2导通。
10.如权利要求4所述的一种基于三桥臂的双路双向磁轴承悬浮电流控制方法,其特征在于:当ig1<0,ig2<0且eo1<-δith,eo2<-δith,在一个控制周期t内,控制单元生成pwm控制信号,pwm2和pwm7控制mos管q2断开,pwm4控制mos管q4导通。
技术总结
基于三桥臂的双路双向磁轴承悬浮电流控制电路及方法,包括:控制单元,用于根据上位的给定电流和磁轴承的反馈电流产生八路控制信号;桥臂组件,包括第一桥臂、第二桥臂和复用桥臂,双路磁轴承的绕组对应连接在复用桥臂和第一桥臂之间以及复用桥臂和第二桥臂之间,第一桥臂、复用桥臂和第二桥臂均包括至少两个MOS管;第一桥臂中的所有MOS管各由一路控制信号控制,第二桥臂中的所有MOS管各由一路控制信号控制,复用桥臂中的MOS管由两路控制信号控制;电压源,用于向桥臂组件供电。本发明,能够输出双路双向磁轴承悬浮电流,且减小了体积以及降低物料成本。
技术研发人员:郭辉,张家书,蔡大明
受保护的技术使用者:洛阳嘉盛电控技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!