用于无人水下滑翔机的电磁减振装置及无人水下滑翔机
本发明涉及水下滑翔机,特别是涉及一种用于无人水下滑翔机的电磁减振装置及无人水下滑翔机。
背景技术:
1、传统的无人水下滑翔机利用净浮力和姿态角调整获得推进力,能源消耗极小,并且具有效率高、航程远的特点。虽然水下滑翔机的航行速度较慢,但其制造成本和维护费用低、可重复使用、并可大量投放等特点,满足了长时间、大范围海洋探索的需要。
2、水下无人滑翔机一般由推进和控制系统、通信系统和任务载荷系统组成。其中推进和控制系统主要负责推动无人滑翔机前进以及姿态控制。常见的推进系统有传统的浮力驱动,也有增设了螺旋桨的混合驱动。通信系统主要负责与母船的信息联络和数据传输。任务载荷主要配备侦察、探测、信标、测量等仪器,完成主要的航行任务任务。对于不同的航行任务,水下无人滑翔机均可通过搭载不同的任务载荷模块来实现。
3、与传统的水面舰艇和与水下潜航器相比相比,水下无人滑翔机具有诸多优势,例如:一、体积小,构造简单,造价低廉,因此执行任务的费用大大低于传统水面舰艇;二、无人操控,节省人力成本,并且由于其无人特性,可以到水下较危险的区域执行任务,适用范围广。三、水下无人滑翔机航程较远,因此可执行任务的范围更广,使用限制更少,因此具有极其重要的军事价值和民用价值。目前水下无人滑翔机已成为世界各国备受关注的热点。
4、虽然水下无人滑翔机的前景颇为看好,目前已有浮力驱动,混合驱动等多种新型水下无人滑翔机,但是由于结构振动,其较大的航程任务下会不可避免的带来结构损伤。因此,追求减振以避免结构损伤就成为水下无人滑翔机迫切需要解决的问题。
5、在水下无人滑翔机的航行过程,由于粘性流体流过水下无人滑翔机表面时,其表面形成的边界层会出现流动分离的现象。流动分离会导致涡的周期性脱落,并产生周期变化的升阻力,最终结构周期性振动,这种现象称为涡激振动(vortex-inducedvibration,简称viv)。这种流固耦合现象不仅会对滑翔机周围的流场产生影响,还会导致滑翔机本身结构,特别是翼型结构的疲劳损伤、断裂以及冲刷等问题。因此,有效的控制其绕流流场从而对边界层分离进行控制,抑制涡激振动的产生对于水下无人滑翔机的减振和结构保护都具有重要的意义。
6、对于控制边界层流动的方法,按照是否需要能量的输入分为主动控制和被动控制方法。电磁力控制作为一种主动控制方式因其安装简单,使用方便备受关注,基本原理是通过电磁激活板产生的电磁场改变流场涡脱落的模式,进而达到抑制涡激振动,起到减振的效果。在弱电解质溶液比如海水中,按照电极磁极交替排布电磁及激活板,当海水流过时,会产生且沿电磁激活版切向排布的电磁力,通过给予边界层动量的方式控制流动,进而达到控制涡激振动减振目的。
7、中国专利200910024984.6公开了一种用于运动体边界层流动控制的电磁流体控制器,适用于运动体边界层流体的分离控制,通过特殊的电磁板布置方式,提供法向的电磁力来对平板上的边界层流体进行分离控制。该专利使用法向定常电磁力进行减阻减振,所需电磁力较大,控制效果较差。
8、中国专利201710242837.0公开了一种用于带有尾翼的高速水下航行体的电磁控制装置,通过对磁体排布方式的设计使磁场对通电的方式使磁场能对通电的海水产生向航行体尾部的推力,从而增加航行体的动力。但需要供电装置来保证对海水持续的电离作用,能耗较大,且减振效果一般。
技术实现思路
1、本发明的目的是提供一种用于无人水下滑翔机的电磁减振装置及无人水下滑翔机,以解决上述现有技术存在的问题,提高减振效果,减少能耗。
2、为实现上述目的,本发明提供了如下方案:
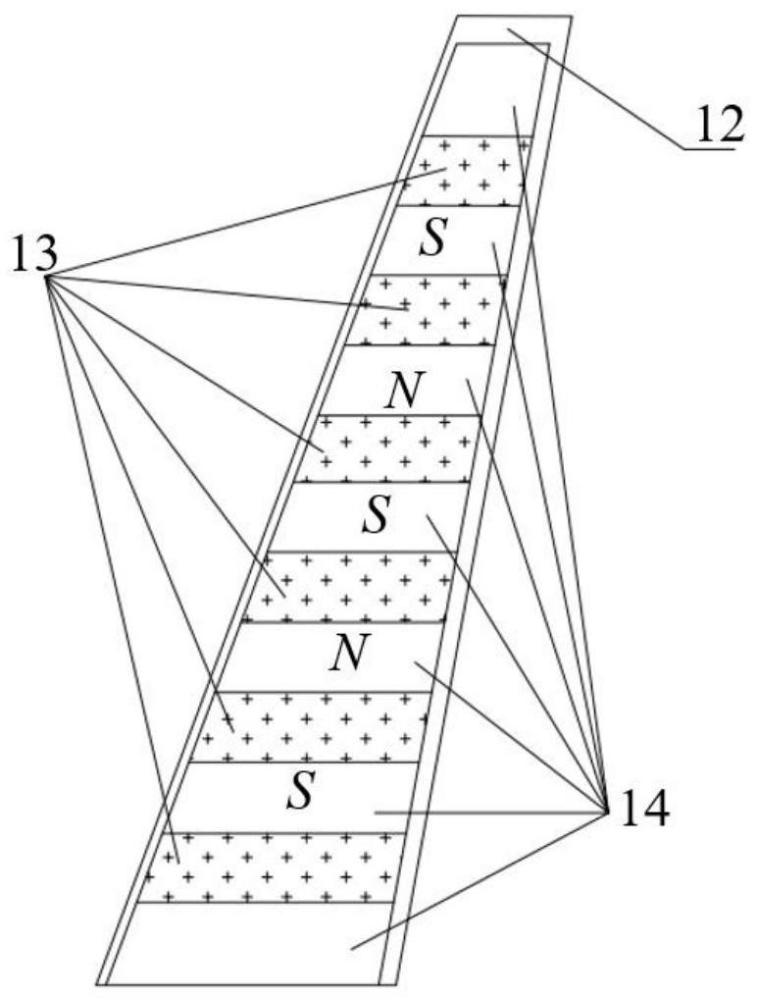
3、本发明提供一种用于无人水下滑翔机的电磁减振装置,包括:交流电源、多个电极板和多个磁体;所述电极板和所述磁体依次交叉布设于翼面上,相邻的两个所述磁体的磁极排列相反,所述交流电源包括火线和零线,任意相邻的两个所述电极板分别与所述火线和所述零线相接。
4、优选的,所述电极板和所述磁体均为薄片结构。
5、本发明还提供了一种无人水下滑翔机,在所述无人水下滑翔机的侧翼和尾翼表面均布置有如上所述的电极板和磁体。
6、优选的,还包括推进系统、机体和发电模块,所述发电模块设置于所述机体上,所述推进系统推进所述机体移动,所述发电模块用于利用推进系统的余能进行发电。
7、优选的,所述侧翼的上下表面均布设有所述电极板和所述磁体。
8、优选的,所述尾翼上的所述电极板和所述磁体呈环形结构,所述电极板和所述磁体套于所述尾翼外。
9、优选的,所述发电模块包括发电机叶轮、固定支架、传动机构、逆变器、整流器、蓄电池和发电机组,所述发电机组和所述固定支架固定于所述机体上,所述传动机构和所述发电机叶轮设置于所述固定支架上,所述发电机叶轮用于收集利用推进系统余能,所述传动机构用于将所述发电机组和所述发电机叶轮进行传动连接,所述交流电源、所述逆变器、所述整流器和所述蓄电池依次电连接。
10、优选的,所述电极板和所述磁体粘合于所述侧翼和所述尾翼表面,所述电极板和所述磁体形成的电磁激活板外围设有一个固定框架。
11、优选的,所述电极板和所述磁体均为薄片结构,所述电极板和所述磁体的厚度不大于所述固定框的厚度,所述电极板的外表面与所述磁体外表面处于同一曲面或平面上。
12、本发明相对于现有技术取得了以下技术效果:
13、第一、本发明对已有的常电磁力控制所用的电磁激活板电极进行改进,将电极正极与负极改为交流电级并与交流电源的火线和零线相连,通过正弦形式的交流电产生变化的电磁场和电磁力。本发明通过周期性电磁力向边界层周期性输入动量,采用改变尾涡脱落频率,避免结构共振的新原理来减振。相比于常电磁力控制控制技术,本发明无需将尾涡脱落完全抑制,而仅仅只需改变其脱落频率,向边界层提供的动量需求较少,在较小的电磁力下即可达到减振目的,更为节能。
14、第二、本发明采用整流器与逆变器调节交流电频率,可产生不同频率的交流电。可以满足不同海水流速(雷诺数不同)、不同翼型材料(材料自振频率不同)的减振需求,减振方法普适性强,运用范围广。
15、第三、本发明通过收集无人滑翔机推进系统余能来发电,提供电磁减振装置所需要的电能,无需添加外部能量装置,可以保证无人滑翔机在航程较大、工作时间较长的使用特性下,减振模块的持续稳定工作。
16、第四、本发明安装便捷,使用方便,仅需要在外侧包覆电磁激活板即可,而无需改变水下滑翔机的固有外形结构,不会因外形变化导致滑翔机阻力增加。
技术特征:
1.一种用于无人水下滑翔机的电磁减振装置,其特征在于:包括:交流电源、多个电极板和多个磁体;所述电极板和所述磁体依次交叉布设于翼面上,相邻的两个所述磁体的磁极排列相反,所述交流电源包括火线和零线,任意相邻的两个所述电极板分别与所述火线和所述零线相接。
2.根据权利要求1所述的用于无人水下滑翔机的电磁减振装置,其特征在于:所述电极板和所述磁体均为薄片结构。
3.一种无人水下滑翔机,其特征在于:在所述无人水下滑翔机的侧翼和尾翼表面均布置有权利要求1~2任意一项所述的电磁减振装置中的电极板和磁体。
4.根据权利要求3所述的无人水下滑翔机,其特征在于:还包括推进系统、机体和发电模块,所述发电模块设置于所述机体上,所述推进系统推进所述机体移动,所述发电模块用于利用推进系统的余能进行发电。
5.根据权利要求3所述的无人水下滑翔机,其特征在于:所述侧翼的上下表面均布设有所述电极板和所述磁体。
6.根据权利要求5所述的无人水下滑翔机,其特征在于:所述尾翼上的所述电极板和所述磁体呈环形结构,所述电极板和所述磁体套于所述尾翼外。
7.根据权利要求4所述的无人水下滑翔机,其特征在于:所述发电模块包括发电机叶轮、固定支架、传动机构、逆变器、整流器、蓄电池和发电机组,所述发电机组和所述固定支架固定于所述机体上,所述传动机构和所述发电机叶轮设置于所述固定支架上,所述发电机叶轮用于收集利用推进系统余能,所述传动机构用于将所述发电机组和所述发电机叶轮进行传动连接,所述交流电源、所述逆变器、所述整流器和所述蓄电池依次电连接。
8.根据权利要求5所述的无人水下滑翔机,其特征在于:所述电极板和所述磁体粘合于所述侧翼和所述尾翼表面,所述电极板和所述磁体形成的电磁激活板外围设有一个固定框架。
9.根据权利要求8所述的无人水下滑翔机,其特征在于:所述电极板和所述磁体均为薄片结构,所述电极板和所述磁体的厚度不大于所述固定框的厚度,所述电极板的外表面与所述磁体外表面处于同一曲面或平面上。
技术总结
本发明提供一种用于无人水下滑翔机的电磁减振装置及无人水下滑翔机,涉及水下滑翔机技术领域,用于无人水下滑翔机的电磁减振装置包括:交流电源、多个电极板和多个磁体;电极板和磁体依次交叉布设于翼面上,相邻的两个磁体的磁极排列相反,交流电源包括火线和零线,任意相邻的两个电极板分别与火线和零线相接。相比于现有技术,本发明通过周期性电磁力向边界层周期性输入动量,采用改变尾涡脱落频率,避免结构共振的新原理来减振。相比于常电磁力控制控制技术,本发明无需将尾涡脱落完全抑制,而仅仅只需改变其脱落频率,向边界层提供的动量需求较少,在较小的电磁力下即可达到减振目的,更为节能。
技术研发人员:张辉,贾晓宇
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!