一种基于PLC对滚珠丝杠反向间隙补偿系统及方法与流程
本发明涉及plc,具体而言,特别涉及一种基于plc对滚珠丝杠反向间隙补偿系统及方法。
背景技术:
1、现有技术中,在机械设备中,因为丝杠和螺母之间肯定存在一定的间隙,所以在正转后变换成反转的时候,在一定的角度内,尽管丝杠转动,但是螺母还要等间隙消除以后才能带动工作台运动,这个间隙就是反向间隙;由于反向间隙的存在,会对传动精度和加工精度有着一定的影响,在高精度的应用场合需对反向间隙进行测量与补偿,特别是采用半闭环控制的程控机床,反向间隙会影响到定位精度和重复定位精度;滚珠丝杠在长期使用过程中,反向间隙会不断增加,经常更换滚丝杠会导致企业成本增加;所以有必要对这一问题进行解决。
技术实现思路
1、本发明旨在至少在一定程度上解决现有技术中的上述技术问题之一。为此,本发明的一个目的在于提出一种在丝杠转动时能自动把反向间隙值的距离补偿进螺母的移动距离中,提升加工精度的基于plc对滚珠丝杠反向间隙补偿系统及方法。
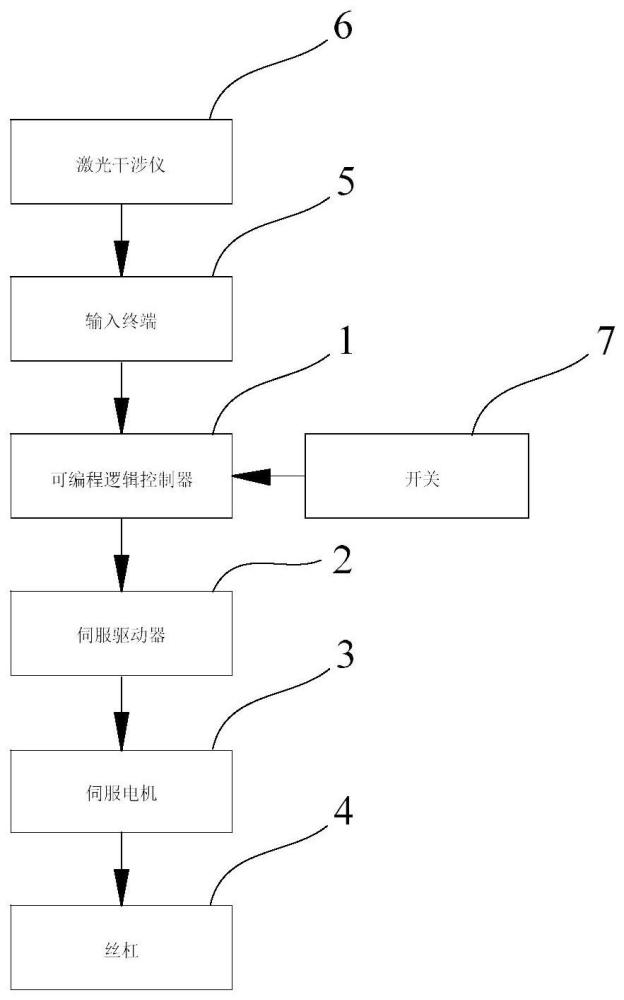
2、本发明解决上述技术问题的技术方案如下:一种基于plc对滚珠丝杠反向间隙补偿系统,包括可编程逻辑控制器、伺服驱动器和伺服电机;
3、所述可编程逻辑控制器的信号输出端与所述伺服驱动器的信号输入端连接,所述可编程逻辑控制器用于接入含有反向间隙值的第一输入信号;所述可编程逻辑控制器还用于根据第一输入信号生成驱动信号传输至伺服驱动器;
4、所述伺服驱动器的信号输出端与所述伺服电机的信号输入端连接,所述伺服驱动器用于根据驱动信号驱动所述伺服电机进行运转,所述伺服电机驱动丝杠进行转动,丝杠带动螺母进行移动;螺母的移动距离包含需要补偿的反向间隙值的距离。
5、在上述技术方案的基础上,本发明还可以做如下改进。
6、进一步,还包括输入终端,所述输入终端与所述可编程逻辑控制器电性连接;所述输入终端还用于输入螺母的移动距离值,生成第二输入信号;所述输入终端用于输入需要补偿的反向间隙值,将螺母的移动距离值和反向间隙值进行数值计算,利用计算结果生成含有反向间隙值的第一输入信号传输至可编程逻辑控制器。
7、进一步,所述可编程逻辑控制器还用于根据第一输入信号或第二输入信号判断伺服驱动器和伺服电机控制丝杠的转动方向;当丝杠的转动方向与其上次的转动方向一致时,所述可编程逻辑控制器根据第二输入信号生成驱动信号传输至伺服驱动器;当丝杠的转动方向与其上次的转动方向相反时,所述可编程逻辑控制器根据第一输入信号生成驱动信号传输至伺服驱动器。
8、进一步,还包括激光干涉仪,所述激光干涉仪与所述输入终端电性连接,所述激光干涉仪用于测量丝杠和螺母之间的间隙值,生成含有间隙值的测量信号传输至输入终端;
9、所述输入终端还用于根据丝杠和螺母之间的间隙值计算出丝杠和螺母之间需要补偿的反向间隙值,生成含有反向间隙值的第一输入信号。
10、进一步,还包括开关,所述开关与所述可编程逻辑控制器电性连接;所述开关用于接受手动调控,进行导通或断开,并生成启动信号或关闭信号传输至可编程逻辑控制器;所述可编程逻辑控制器根据启动信号进行启动开机;所述可编程逻辑控制器根据关闭信号进行关机。
11、本发明的有益效果是:在丝杠转动时能自动把反向间隙值的距离补偿进螺母的移动距离中,避免因反向间隙的原因偏差过大,提升加工精度。
12、本发明解决上述技术问题的另一技术方案如下:一种基于plc对滚珠丝杠反向间隙补偿方法,包括以下步骤:
13、可编程逻辑控制器接入含有反向间隙值的第一输入信号;还根据第一输入信号生成驱动信号传输至伺服驱动器;
14、伺服驱动器根据驱动信号驱动所述伺服电机进行运转,所述伺服电机驱动丝杠进行转动,丝杠带动螺母进行移动;螺母的移动距离包含需要补偿的反向间隙值的距离。
15、在上述技术方案的基础上,本发明还可以做如下改进。
16、进一步,还包括以下步骤:
17、所述输入终端输入螺母的移动距离值,生成第二输入信号;所述输入终端还输入需要补偿的反向间隙值,将螺母的移动距离值和反向间隙值进行数值计算,利用计算结果生成含有反向间隙值的第一输入信号传输至可编程逻辑控制器。
18、进一步,还包括以下步骤:
19、所述可编程逻辑控制器还根据第一输入信号或第二输入信号判断伺服驱动器和伺服电机控制丝杠的转动方向;当丝杠的转动方向与其上次的转动方向一致时,所述可编程逻辑控制器根据第二输入信号生成驱动信号传输至伺服驱动器;当丝杠的转动方向与其上次的转动方向相反时,所述可编程逻辑控制器根据第一输入信号生成驱动信号传输至伺服驱动器。
20、本发明的有益效果是:在丝杠转动时能自动把反向间隙值的距离补偿进螺母的移动距离中,避免因反向间隙的原因偏差过大,提升加工精度。
技术特征:
1.一种基于plc对滚珠丝杠反向间隙补偿系统,其特征在于:包括可编程逻辑控制器(1)、伺服驱动器(2)和伺服电机(3);
2.根据权利要求1所述的基于plc对滚珠丝杠反向间隙补偿系统,其特征在于:还包括输入终端(5),所述输入终端(5)与所述可编程逻辑控制器(1)电性连接;所述输入终端(5)还用于输入螺母的移动距离值,生成第二输入信号;所述输入终端(5)用于输入需要补偿的反向间隙值,将螺母的移动距离值和反向间隙值进行数值计算,利用计算结果生成含有反向间隙值的第一输入信号传输至可编程逻辑控制器(1)。
3.根据权利要求2所述的基于plc对滚珠丝杠反向间隙补偿系统,其特征在于:所述可编程逻辑控制器(1)还用于根据第一输入信号或第二输入信号判断伺服驱动器(2)和伺服电机(3)控制丝杠(4)的转动方向;当丝杠(4)的转动方向与其上次的转动方向一致时,所述可编程逻辑控制器(1)根据第二输入信号生成驱动信号传输至伺服驱动器(2);当丝杠(4)的转动方向与其上次的转动方向相反时,所述可编程逻辑控制器(1)根据第一输入信号生成驱动信号传输至伺服驱动器(2)。
4.根据权利要求1至3任一项所述的基于plc对滚珠丝杠反向间隙补偿系统,其特征在于:还包括激光干涉仪(6),所述激光干涉仪(6)与所述输入终端(5)电性连接,所述激光干涉仪(6)用于测量丝杠(4)和螺母之间的间隙值,生成含有间隙值的测量信号传输至输入终端(5);
5.根据权利要求1所述的基于plc对滚珠丝杠反向间隙补偿系统,其特征在于:还包括开关(7),所述开关(7)与所述可编程逻辑控制器(1)电性连接;所述开关(7)用于接受手动调控,进行导通或断开,并生成启动信号或关闭信号传输至可编程逻辑控制器(1);所述可编程逻辑控制器(1)根据启动信号进行启动开机;所述可编程逻辑控制器(1)根据关闭信号进行关机。
6.一种基于plc对滚珠丝杠反向间隙补偿方法,其特征在于:包括以下步骤:
7.根据权利要求6所述的基于plc对滚珠丝杠反向间隙补偿方法,其特征在于:还包括以下步骤:
8.根据权利要求7所述的基于plc对滚珠丝杠反向间隙补偿方法,其特征在于:还包括以下步骤:
技术总结
本发明涉及一种基于PLC对滚珠丝杠反向间隙补偿系统及方法,基于PLC对滚珠丝杠反向间隙补偿系统包括可编程逻辑控制器、伺服驱动器和伺服电机;可编程逻辑控制器的信号输出端与伺服驱动器的信号输入端连接,可编程逻辑控制器接入含有反向间隙值的第一输入信号;可编程逻辑控制器还根据第一输入信号生成驱动信号传输至伺服驱动器;伺服驱动器的信号输出端与伺服电机的信号输入端连接,伺服驱动器根据驱动信号驱动伺服电机进行运转,伺服电机驱动丝杠进行转动,丝杠带动螺母进行移动;螺母的移动距离包含需要补偿的反向间隙值的距离。相对现有技术,本发明在丝杠转动时能自动把反向间隙值的距离补偿进螺母的移动距离中,提升加工精度。
技术研发人员:张福磊,陈弘,邓绍龙,张琳,王建卫,周明,周晶
受保护的技术使用者:桂林海威科技股份有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!