蜈蚣型管道机器人
本技术涉及管道机器人领域,具体是指一种蜈蚣型管道机器人。
背景技术:
1、燃气管道顾名思义就是用于燃气运输的管道,运行久了的管道内会出现阻塞物,例如管道的内壁会由于长时间的湿气腐蚀,导致产生一些锈斑,这些锈斑产生的锈块会出现脱落的现象,从而影响装置内部的清洁程度,所以需要对管道内部进行定时的清理;也存在管道内部可燃气体堵塞引起浓度超标问题,甚至引起爆炸的问题。
2、传统的燃气管道施工维护用的清理装置在使用时还存在以下问题:
3、传统的施工维护用的清理装置,普遍是贴地行走及沿着管道底部行走的管道机器人,行动方式受限,无法适应不同状况下的特殊环境;
4、传统的清理装置不能根据燃气管道的内壁直径,进行相应的调节,不同的管径,需要更换不同的相关零部件,工作繁琐,整机适应相差。
技术实现思路
1、本实用新型要解决的技术问题是克服上述技术的缺陷,提供一种蜈蚣型管道机器人。
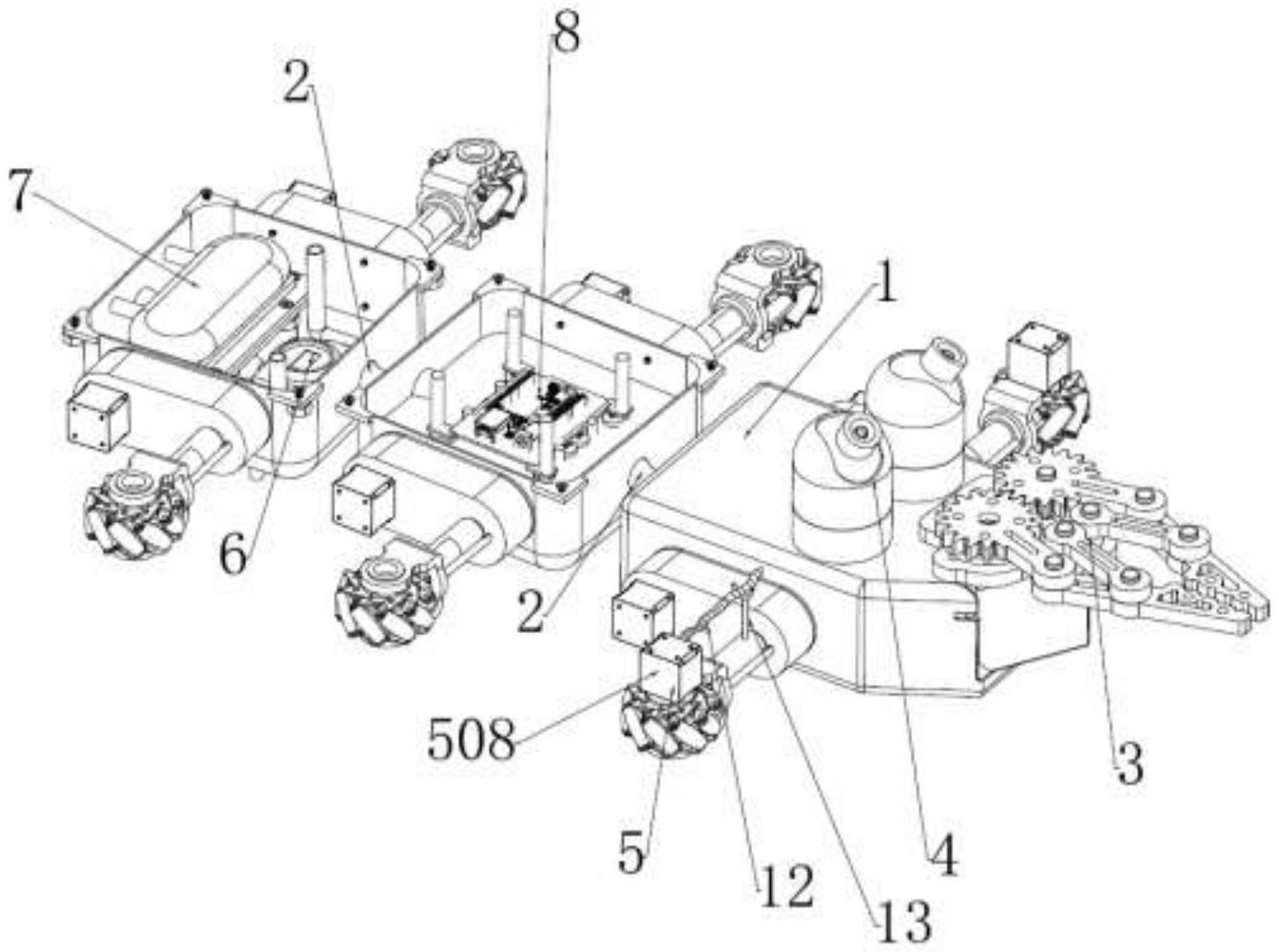
2、蜈蚣型管道机器人,包括若干通过万向连接器连接的若干小车,位于首端的小车的前端设有夹取装置,位于首端的小车的顶部设有摄像装置,每个小车的两则均设有伸缩行走装置,所述伸缩行走装置包括壳体,所述壳体上设有由丝杠电机驱动转动的丝杠,所述丝杠的外侧螺接有套筒,所述套筒远离丝杠一端连接有行走轮,所述套筒的外侧设有导向槽,所述壳体上设有与导向槽匹配的导向柱,所述丝杠电机控制丝杠来回转动,套筒沿着丝杠的轴线方向来回移动,位于首端的小车两侧的行走轮均连接有驱动电机。
3、进一步地,所述夹取装置包括法兰盘,所述法兰盘上侧设有两个对称设置的夹臂组件,下侧设有舵机,每个夹臂组件均包括夹臂、连杆和齿轮杆,所述齿轮杆的一端设有齿轮盘,另一端铰接于夹臂,所述连杆的一端铰接于夹臂,另一端铰接于法兰盘,所述舵机的输出端通过舵机盘与一个齿轮杆的齿轮盘连接,另一个齿轮杆的齿轮盘连接于法兰盘,连接在法兰盘上的齿轮盘能够围绕自身轴线转动。
4、进一步地,其中一个小车内安装有用于检测管道内可燃气体的浓度的气体检测装置和存储惰性气体的储气装置,所述气体检测装置检测的管道内可燃气体浓度超标,控制储气装置释放惰性气体,降低可燃气体浓度。
5、进一步地,其中一个小车内安装有控制系统,所述控制系统包括单片机。
6、进一步地,所述行走轮的轮体采用麦克纳姆轮。
7、进一步地,所述丝杠电机的输出端通过齿传动连接于丝杠。
8、进一步地,首端的小车两侧的驱动电机与小车之间设有伸缩线管,所述套筒上设有支撑伸缩线管的支撑架。
9、本实用新型优点:本实用新型结构合理,外形美观、多功能于一体,操作方便,能够有效帮助管道内部的维护,提高维护工作效率;采用行走轮在管道内壁两侧的方式运动,相对于市面上普遍的贴地行走管道机器人,行动方式更加多样,更能适应不同状况下的特殊环境,依靠麦克纳姆轮,甚至能够实现在管道内部的螺旋向前运动,真正做到在管道内部的多方位运动;内部有储气装置装有一定的惰性气体,在检测出可燃气体浓度超标时可做应急处理。
技术特征:
1.蜈蚣型管道机器人,其特征在于:包括若干通过万向连接器(2)连接的若干小车(1),位于首端的小车(1)的前端设有夹取装置(3),位于首端的小车(1)的顶部设有摄像装置(4),每个小车(1)的两则均设有伸缩行走装置(5),所述伸缩行走装置(5)包括壳体(501),所述壳体(501)上设有由丝杠电机(502)驱动转动的丝杠(503),所述丝杠(503)的外侧螺接有套筒(504),所述套筒(504)远离丝杠(503)一端连接有行走轮(505),所述套筒(504)的外侧设有导向槽(506),所述壳体(501)上设有与导向槽(506)匹配的导向柱(507),所述丝杠电机(502)控制丝杠(503)来回转动,套筒(504)沿着丝杠(503)的轴线方向来回移动,位于首端的小车(1)两侧的行走轮(505)均连接有驱动电机(508)。
2.根据权利要求1所述的蜈蚣型管道机器人,其特征在于:所述夹取装置(3)包括法兰盘(301),所述法兰盘(301)上侧设有两个对称设置的夹臂组件,下侧设有舵机(302),每个夹臂组件均包括夹臂(303)、连杆(304)和齿轮杆(305),所述齿轮杆(305)的一端设有齿轮盘(3051),另一端铰接于夹臂(303),所述连杆(304)的一端铰接于夹臂(303),另一端铰接于法兰盘(301),所述舵机(302)的输出端通过舵机盘(306)与一个齿轮杆(305)的齿轮盘(3051)连接,另一个齿轮杆(305)的齿轮盘(3051)连接于法兰盘(301),连接在法兰盘(301)上的齿轮盘(3051)能够围绕自身轴线转动。
3.根据权利要求1所述的蜈蚣型管道机器人,其特征在于:其中一个小车(1)内安装有用于检测管道内可燃气体的浓度的气体检测装置(6)和存储惰性气体的储气装置(7),所述气体检测装置(6)检测的管道内可燃气体浓度超标,控制储气装置(7)释放惰性气体,降低可燃气体浓度。
4.根据权利要求1所述的蜈蚣型管道机器人,其特征在于:其中一个小车(1)内安装有控制系统,所述控制系统包括单片机(8)。
5.根据权利要求1所述的蜈蚣型管道机器人,其特征在于:所述行走轮(505)的轮体采用麦克纳姆轮。
6.根据权利要求1所述的蜈蚣型管道机器人,其特征在于:所述丝杠电机(502)的输出端通过齿传动连接于丝杠(503)。
技术总结
本技术具体是指一种蜈蚣型管道机器人,包括若干通过万向连接器连接的若干小车,位于首端的小车的前端设有夹取装置,位于首端的小车的顶部设有摄像装置,每个小车的两则均设有伸缩行走装置,所述伸缩行走装置包括壳体,所述壳体上设有由丝杠电机驱动转动的丝杠,所述丝杠的外侧螺接有套筒,所述套筒远离丝杠一端连接有行走轮,所述套筒的外侧设有导向槽,所述壳体上设有与导向槽匹配的导向柱,所述丝杠电机控制丝杠来回转动,套筒沿着丝杠的轴线方向来回移动,位于首端的小车两侧的行走轮均连接有驱动电机。本技术结构合理,外形美观、多功能于一体,操作方便,能够有效帮助管道内部的维护,提高维护工作效率,适应性强。
技术研发人员:李伟强,李佳甜,郭宝琦,徐梓喆
受保护的技术使用者:太原理工大学
技术研发日:20230210
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!