曲面爬行机器人
本技术涉及林机器人,具体为曲面爬行机器人。
背景技术:
1、在工农工业生产和日常生活中,管道的应用多种多样,小到天然气管道,大到固体运输,石油运输等,运输管道作为一种重要的物料运输手段,其应用的范围相当广泛。但在应用广泛的基础上,对于管道的检测,保养,维修就显得尤为重要,在管道的使用过程中,如果不及时的进行检测,就容易发生故障,造成不必要的损失。
2、目前,国内外开发的管道机器人种类繁多,按供能方式可分为两类有缆方式和无缆方式。电缆驱动的管道机器人的主要问题是行走距离和转弯多的情况下,电缆与管壁的摩擦力会变得很大,严重影响机器人的最大线路行走距离,而且还会带来安全可靠性等一系列的问题。目前,无电缆能源有两种选择,一种是电池,另一种是燃料,这两种方案都有体积大和增加机器人自身重量的缺点况且储存的能量毕竟有限,受电池质量、充电技术等因素影响,因而对于机器人的行走距离我们仍然受限制。
3、现在管道机器主要分为针对大管道所研制的履带或轮式机器人,这种机器人通常拥有一个较大的底盘可以加装针对不同环境所使用的不同配件。机器人结构复杂,质量较大,不方便在复杂管道内前进。
技术实现思路
1、本实用新型的目的在于提供曲面爬行机器人,有利于实现机器人沿管道爬行。
2、为实现上述目的,本实用新型提供如下技术方案:曲面爬行机器人,包括仿生足组件,仿生足组件,用于实现爬行;所述仿生足组件包括第一舵机;u形板,位于所述第一舵机一侧,所述第一舵机固定连接所述u形板;导向柱,位于所述u形板一侧,固定连接所述u形板,所述导向柱设置有对称的圆孔及对称的导向孔,对称的所述圆孔分别连通对应的所述导向孔;对称的弹簧,分别设置在对应的所述圆孔内,分别固定连接所述u形板;对称的导向杆,分别设置在对应的所述导向孔内,分别固定连接对应的所述弹簧;u板,位于对称的所述导向杆端部,固定连接对称的所述导向杆;第二舵机,一端位于所述u板区域内,所述第二舵机输出轴转动连接所述u板;u形座,位于所述第二舵机一侧,固定连接所述第二舵机,所述u形座固定连接方杆,所述方杆固定连接圆柱,所述圆柱固定连接一组均匀分布的第一摩擦凸起;支撑座,设置有优弧槽,所述圆柱设置在所述优弧槽内,所述圆柱转动连接所述支撑座,所述支撑座对应所述优弧槽设置有第二摩擦凸起,所述第一摩擦凸起匹配所述第二摩擦凸起,用来增加所述圆柱与所述支撑座的摩擦力;接触足,位于所述支撑座一侧,固定连接所述支撑座。
3、作为本技术方案的进一步限定,还包括支撑组件,所述支撑组件包括两个支撑圆板,每个所述支撑圆板分别设置有四个均匀分布的凸形槽,下侧所述支撑圆板固定连接导向圆环,两个所述支撑圆板分别固定连接圆盒。
4、作为本技术方案的进一步限定,还包括升降组件,所述升降组件包括另一组升降舵机,每个所述舵机的输出轴分别固定连接连杆三的一端,每个所述连杆三的另一端分别转动连接连杆二,上侧所述支撑圆板固定连接圆环,所述圆环固定连接一组圆轴,每个所述连杆二的另一端分别转动连接对应的所述圆轴。
5、作为本技术方案的进一步限定,还包括调节组件,所述调节组件包括两个电机,两个所述电机分别固定连接对应的所述圆盒,两个所述电机的输出轴分别固定连接锥齿轮二,两个所述锥齿轮二分别啮合锥齿轮一,两个所述锥齿轮一的输出轴分别轴承连接对应的所述圆盒,两个所述锥齿轮一的输出轴分别固定连接转盘的中心轴,两个所述转盘的中心轴分别轴承连接对应的所述支撑圆板,两个所述转盘分别设置有四个均匀分布的弧形槽。
6、作为本技术方案的进一步限定,每个所述弧形槽内分别设置有圆块,每个所述凸形槽内分别设置有凸形块,每个所述圆块分别固定连接对应的所述第一舵机,每个所述凸形块分别转动连接对应的所述第一舵机的输出轴。
7、作为本技术方案的进一步限定,两个所述转盘的中心轴分别固定连接连杆一的中心,两个所述连杆一的两端分别固定连接重块。
8、与现有技术相比,本实用新型的有益效果如下:
9、1、现在市面上的管道维修等领域的机器人,是受到能源驱动的方式而无法远距离行动,针对以上缺点,我们设计的曲面爬行机器人可以减少以上缺点对于机器人的影响。
10、2、本装置与履带或轮式机器人相比,结构简单,体积小,轻量化设计,更适应复杂的管道。
11、3、管道机器人工作环境为管道内,管径的变化范围为φ500mm-680mm,由于管径的变化,所以要考虑适应转变管径的撑开机构;通过对多种管道机器人的行走机构研究分析比较,考虑管道内的废物阻碍行走,所以机器人采用了可以竖直爬升,并且可以越过障碍的类球式结构。相比于传统的管道机器人,该管道机器人可以在管道中进出分支管道。
技术特征:
1.曲面爬行机器人,其特征在于,包括:
2.根据权利要求1所述的曲面爬行机器人,其特征在于:还包括支撑组件(3),所述支撑组件(3)包括两个支撑圆板(31),每个所述支撑圆板(31)分别设置有四个均匀分布的凸形槽(32),下侧所述支撑圆板(31)固定连接导向圆环(33),两个所述支撑圆板(31)分别固定连接圆盒(34)。
3.根据权利要求2所述的曲面爬行机器人,其特征在于:还包括升降组件(4),所述升降组件(4)包括另一组升降舵机(45),每个所述舵机(45)的输出轴分别固定连接连杆三(44)的一端,每个所述连杆三(44)的另一端分别转动连接连杆二(43),上侧所述支撑圆板(31)固定连接圆环(42),所述圆环(42)固定连接一组圆轴(41),每个所述连杆二(43)的另一端分别转动连接对应的所述圆轴(41)。
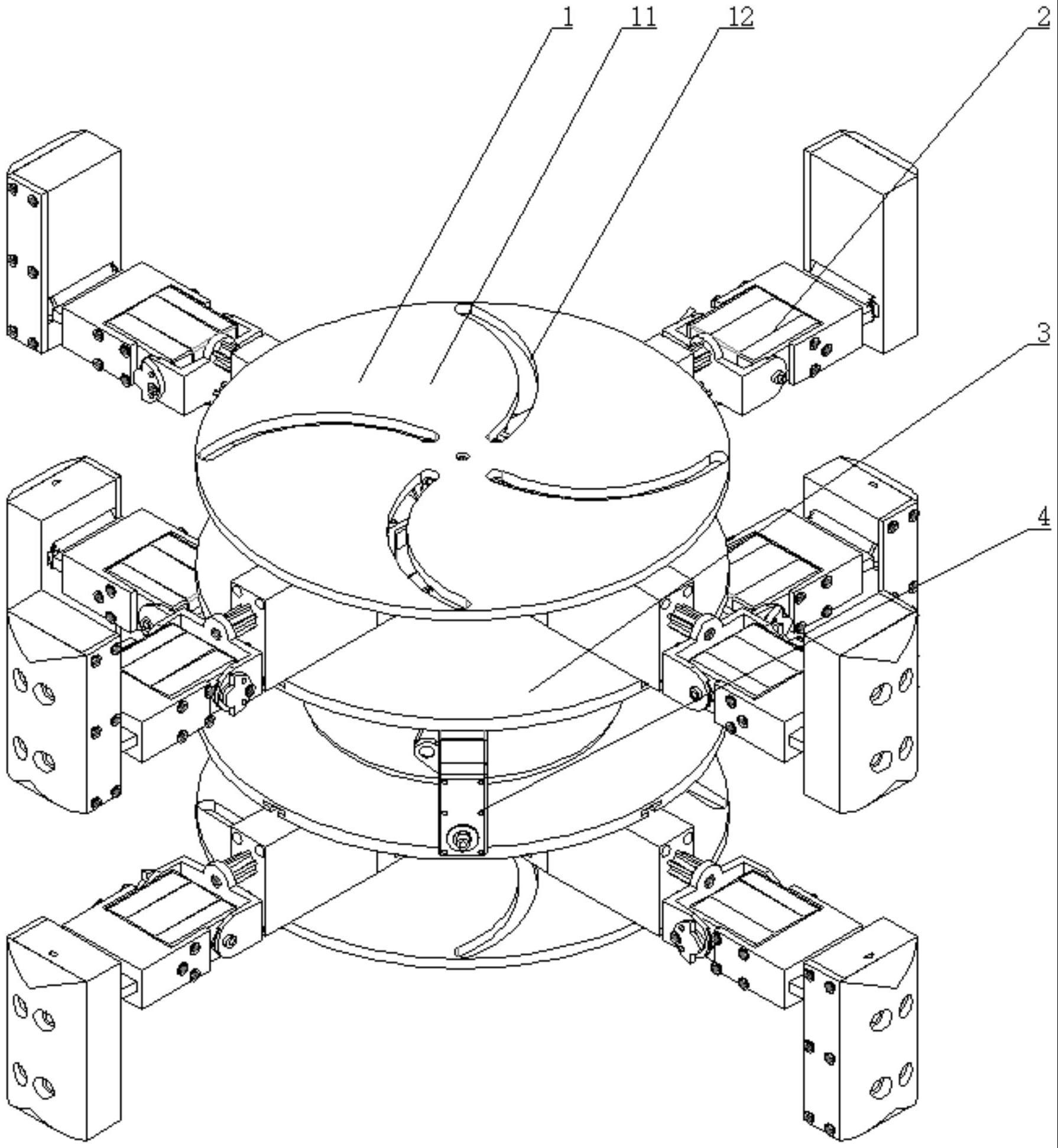
4.根据权利要求3所述的曲面爬行机器人,其特征在于:还包括调节组件(1),所述调节组件(1)包括两个电机(15),两个所述电机(15)分别固定连接对应的所述圆盒(34),两个所述电机(15)的输出轴分别固定连接锥齿轮二(14),两个所述锥齿轮二(14)分别啮合锥齿轮一(13),两个所述锥齿轮一(13)的输出轴分别轴承连接对应的所述圆盒(34),两个所述锥齿轮一(13)的输出轴分别固定连接转盘(11)的中心轴,两个所述转盘(11)的中心轴分别轴承连接对应的所述支撑圆板(31),两个所述转盘(11)分别设置有四个均匀分布的弧形槽(12)。
5.根据权利要求4所述的曲面爬行机器人,其特征在于:每个所述弧形槽(12)内分别设置有圆块(18),每个所述凸形槽(32)内分别设置有凸形块(19),每个所述圆块(18)分别固定连接对应的所述第一舵机(21),每个所述凸形块(19)分别转动连接对应的所述第一舵机(21)的输出轴。
6.根据权利要求4所述的曲面爬行机器人,其特征在于:两个所述转盘(11)的中心轴分别固定连接连杆一(16)的中心,两个所述连杆一(16)的两端分别固定连接重块(17)。
技术总结
本技术公开了曲面爬行机器人,包括仿生足组件,仿生足组件,用于实现爬行;所述仿生足组件包括第一舵机;U形板,位于所述第一舵机一侧,所述第一舵机固定连接所述U形板;导向柱,位于所述U形板一侧,固定连接所述U形板,所述导向柱设置有对称的圆孔及对称的导向孔,对称的所述圆孔分别连通对应的所述导向孔。本技术涉及林机器人技术领域,具体为曲面爬行机器人。本技术的目的在于提供曲面爬行机器人,有利于实现机器人沿管道爬行。
技术研发人员:张春祺,张虹,张家辉,李延玺,马鑫
受保护的技术使用者:山东商业职业技术学院
技术研发日:20230328
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!