一种用于不同口径反射镜粘接的工装
本技术属于光机系统安装,具体涉及用于不同口径反射镜粘接的工装。
背景技术:
1、为减轻反射镜组件的重量,胶接作为反射镜与粘接块常用的装配方式。镜片的粘接精度会直接影响高端光学设备的性能,在建立某空间小型反射镜与支撑结构之间的连接关系时,要求达到标准的面形精度指标。因此根据反射镜的结构特点及尺寸限制,选用中心支撑方式,同时要求中心支撑结构实现精准安装。
2、现有技术中,一方面,由于机械结构固定,反射镜粘接装置不能适应各种不同尺寸的反射镜,不能进行灵活调整;另一方面,反射镜与粘接块定位方式存在一定问题,如:(1)定位不准确:现有技术常用定位方式是机械夹持和手工定位,这种方式容易受到操作人员技能水平和经验的影响,定位精度低;(2)难以保证粘接厚度:目前方法采用等径颗粒放入胶层中达到理想的粘接厚度,导致反射镜和粘接块之间胶层分布不均匀,粘接应力不一致,进而影响粘接质量。
技术实现思路
1、本实用新型针对现有技术存在的不能适应不同尺寸反射镜粘接、粘接应力分布不均匀、定位精度低的问题,提出了一种用于不同口径反射镜粘接的工装。
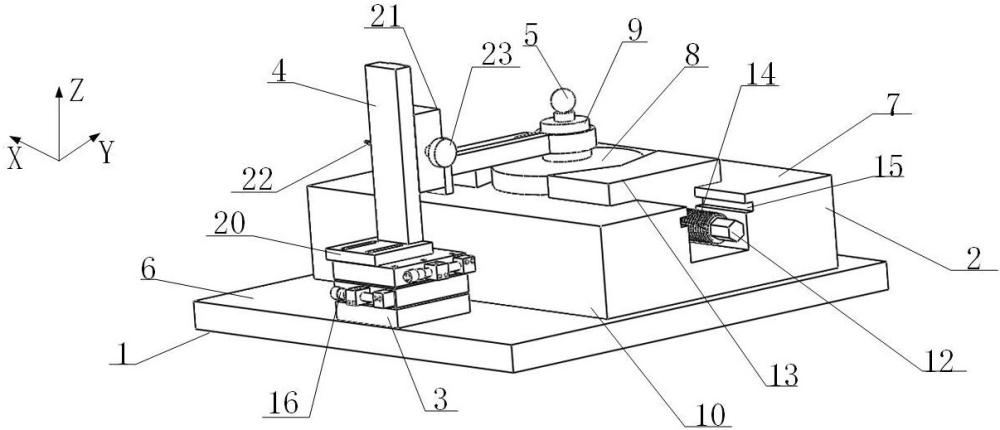
2、为实现上述目的,本实用新型采用的技术方案如下:一种反射镜粘接工装,其特征在于,所述粘接工装包括:工装底座(1)、 自动定心虎钳(2)、光学移动平台(3)、垂直升降平台(4)、基准球(5)。所述工装底座(1)上有承载面(6),用于承载自动定心虎钳(2)、光学移动平台(3);自动定心虎钳(2)通过定位销固定在工装底座(1)上,使位于承载面(7)上的反射镜(8)自动定心夹紧,以反射镜(8)背部粘接面为定位基准建立激光定位仪模式下的坐标系,进而得到反射镜(8)背部粘接面的中心坐标;自动定心虎钳(2)上设有反射镜承载面(7);光学移动平台(3)位于工装底座(1)上,用于连接垂直升降平台(4),可实现x、y轴方向平动调节;垂直升降平台(4)通过螺栓固定于光学位移平台(3)上,通过夹持器(5)将粘接块(9)夹紧,可实现沿z轴移动,从而控制粘接块(9)与反射镜(8)的粘接距离;基准球(5)位于粘接块(9)上部,用于实现粘接块(9)与反射镜(8)定位。
3、所述自动定心虎钳(2)包括虎钳座(10)、支撑座(11)、正反螺旋丝杠(12)、v型夹紧块(13);虎钳座(10)通过u型槽(15)连接承载面(7)上的v型夹紧块(13);支撑座(11)位于虎钳座(10)上,用于承载正反螺旋丝杠(12);正反螺旋丝杠(12)与v型夹紧块(13)通过螺纹(14)配合,用以驱使v型夹紧块(13)沿着u型槽(15)同时向中间移动,实现反射镜(8)夹紧与定心,可应用于不同口径的反射镜。
4、所述光学移动平台(3)包括微分头(16)、紧锁螺丝(17)、工作台面(18)、底座(19);微分头(16)位于光学移动平台(3)的一侧,用以调节工作台面(18)在x、y轴方向的移动距离;工作台面(18)与上部的垂直升降平台(4)通过螺栓固定连接;紧缩螺丝(17)可以控制工作台面(18)的复位;底座(19)通过螺栓固定于工装底座(1)上,光学移动平台(3)可调节垂直升降平台x、y轴方向的位置,进而调整粘接块(9)与反射镜(8)相对位置。
5、所述垂直升降平台(4)包括固定座(20)、滑块(21)、锁紧装置(22)、调节螺丝(23)、燕尾槽导轨(24)、夹持器(25)、基准球(5);垂直升降平台(4)通过固定座(20)通过螺栓固定于光学移动平台(3)上;锁紧装置(22)用于固定所述滑块(21)在燕尾槽导轨(24)上的任意位置;调节螺丝(23)位于滑块(21)一侧,用于调节滑块(21)的移动;夹持器(25)通过拧紧螺栓将粘接块(9)夹紧,便于移动粘接块(9),夹持器(25)通过螺栓固定于滑块(21)上,实现沿z轴升降,从而控制粘接块(9)与反射镜(8)的粘接距离;基准球(5)位于粘接块(9)上部,用于实现粘接块(9)与反射镜(8)定位。
6、本实用新型的反射镜粘接装置有益效果是:反射镜粘接装置为可调式,适用于不同口径反射镜粘接,粘接精度高,能够有效保障反射镜与粘接块的中心一致性,反射镜背部粘接面与粘接块底部粘接面之间胶层均匀。
技术特征:
1.一种用于不同口径反射镜粘接的工装,其特征在于,所述粘接工装包括:
2.根据权利要求1所述的一种用于不同口径反射镜粘接的工装,其特征在于,所述自动定心虎钳(2)包括虎钳座(10)、支撑座(11)、正反螺旋丝杠(12)、v型夹紧块(13);虎钳座(10)通过u型槽(15)连接反射镜承载面(7)上的v型夹紧块(13);支撑座(11)位于虎钳座(10)上,用于承载正反螺旋丝杠(12);正反螺旋丝杠(12)与v型夹紧块(13)通过螺纹(14)配合,用以驱使v型夹紧块(13)沿着u型槽(15)同时向中间移动,实现反射镜(8)夹紧与定心,可应用于不同口径的反射镜。
3.根据权利要求1所述的一种用于不同口径反射镜粘接的工装,其特征在于,所述光学移动平台(3)包括微分头(16)、紧锁螺丝(17)、工作台面(18)、底座(19);微分头(16)位于光学移动平台(3)的一侧,用以调节工作台面(18)在x、y轴方向的移动距离;工作台面(18)与上部的垂直升降平台(4)通过螺栓固定连接;紧锁螺丝(17)可以控制工作台面(18)的复位;底座(19)通过螺栓固定于工装底座(1)上;光学移动平台(3)可调节垂直升降平台x、y轴方向的位置,进而调整粘接块(9)与反射镜(8)相对位置。
4.根据权利要求1所述的一种用于不同口径反射镜粘接的工装,其特征在于,所述垂直升降平台(4)包括固定座(20)、滑块(21)、锁紧装置(22)、调节螺丝(23)、燕尾槽导轨(24)、夹持器(25)、基准球(5);垂直升降平台(4)的固定座(20)通过螺栓固定于光学移动平台(3)上;锁紧装置(22)用于固定所述滑块(21)在燕尾槽导轨(24)上的任意位置;调节螺丝(23)位于滑块(21)一侧,用于调节滑块(21)的移动;夹持器(25)通过拧紧螺栓将粘接块(9)夹紧,便于移动粘接块(9),夹持器(25)通过螺栓固定于滑块(21)上,实现沿z轴升降,从而控制粘接块(9)与反射镜(8)的粘接距离。
技术总结
本技术提出了一种用于不同口径反射镜粘接的工装,实现反射镜与粘接块之间的粘接。该粘接工装包括工装底座、自动定心虎钳、光学移动平台、垂直升降平台、基准球。工装底座上有承载面,用于承载自动定心虎钳、光学移动平台;自动定心虎钳固定在工装底座上,使反射镜自动定心夹紧;自动定心虎钳上设有反射镜承载面;光学移动平台位于工装底座上,用于连接垂直升降平台,可实现X、Y轴方向平动调节;垂直升降平台固定于光学位移平台,可实现沿Z轴移动;基准球位于粘接块背部,用于实现粘接块与反射镜定位。本技术的反射镜粘接装置可提高不同口径反射镜与粘接块之间的粘接精度。
技术研发人员:程晓辉,关英俊,孙宝玉,韩强
受保护的技术使用者:长春工业大学
技术研发日:20230629
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!