电子水阀控制装置的制作方法
本技术属于新能源汽车电子水阀,具体涉及一种电子水阀控制装置。
背景技术:
1、目前新能源汽车的整车热管理单元正在向集成模块方向发展,这样有助于减小整车热管理单元的体积、减轻该单元的重量以及方便整车布置。热管理集成模块上通常由一个热管理域控制器以及电动水泵、电子水阀执行器、温度传感器、液位传感器、水壶等零部件组成,热管理域控制器控制模块内各零部件的动作并向上一层控制器反馈各零部件的状态。电子水阀执行器内设置有电机,电机驱动水阀的阀芯转动,以调整电子水阀的工作状态。
2、当需要对电子水阀进行状态调节时,需要根据水阀阀芯转动的目标位置和当前位置进行计算,以确定阀芯的转动角度,因此就必须获取阀芯的实时位置。当前的解决方法是在电子水阀执行器内设置位置传感器,利用位置传感器实时监测电机的转动脉冲,或监测电机输出轴的转动圈数或转动角度,或监测阀芯的转动角度,并通过计算获取阀芯的实际位置。这种情况下,由于电子水阀执行器与热管理域控制器分体设置,二者之间需要设置至少四根连接线,其中至少两根为电机的驱动线,另外至少两根为位置传感器的电源线和信号线。由于热管理域控制器与电子水阀执行器之间的连接线束较多,且由于电子水阀执行器内需要设置位置传感器及配套电路,因此整体成本较高,也不利于电子水阀控制部件的小型化。
技术实现思路
1、本实用新型所要解决的技术问题是,针对现有技术的不足,提供一种电子水阀控制装置。
2、为解决上述技术问题,本实用新型所采用的技术方案是:
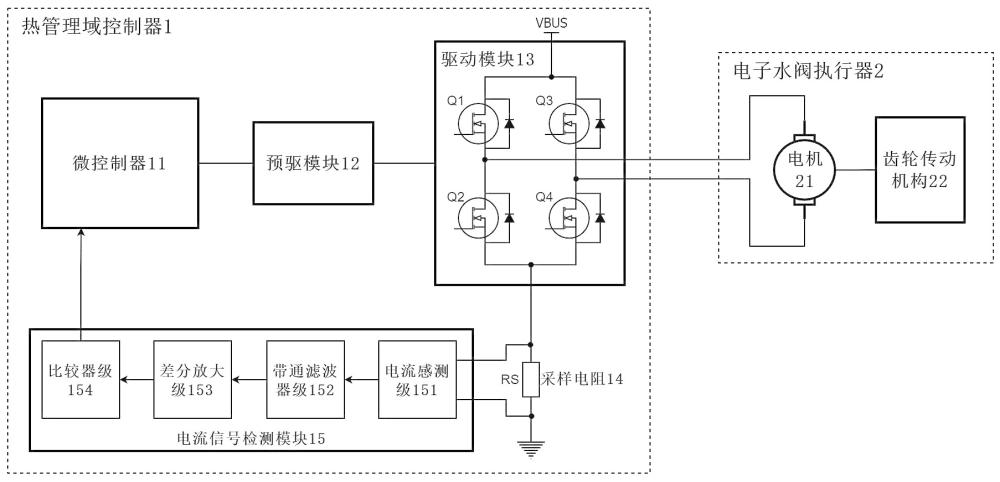
3、一种电子水阀控制装置,包括热管理域控制器和电子水阀执行器,所述热管理域控制器包括微控制器和驱动模块,所述驱动模块与所述电子水阀执行器内直流电机电性连接,所述热管理域控制器还包括电流信号检测模块,所述电流信号检测模块输入端与所述驱动模块电性连接,输出端与所述微控制器电性连接,用于监测所述电机的电流信号。
4、进一步的,所述电流信号检测模块包括按照信号传输方向依次电性连接的电流感测级、带通滤波器级、差分放大级和比较器级,所述电流感测级的输入端与所述驱动模块中串联的采样电阻的两端电性连接,所述比较器级的输出端与所述微控制器电性连接。
5、进一步的,所述电流感测级用于放大电流信号;所述带通滤波器级用于消除电流信号中的dc分量和外部噪声;所述差分放大级用于在保留纹波频率分量的同时消除高电流尖峰的影响;所述比较器级用于输出0v或5v的信号脉冲。
6、进一步的,所述微控制器用于计数所述比较器级输出的信号脉冲。
7、进一步的,所述采样电阻串联在所述驱动模块的接地端。
8、进一步的,所述差分放大级设置有电容器。
9、进一步的,所述比较器级采用反相迟滞结构。
10、进一步的,所述驱动模块中包括h桥驱动电路。
11、进一步的,所述h桥驱动电路包括四个功率mosfet。
12、进一步的,所述微控制器与所述驱动模块之间还串联有预驱模块。
13、进一步的,所述预驱模块包括用于驱动所述驱动模块中所述功率mosfet的mosfet驱动单元。
14、与现有技术相比,本实用新型有益效果如下:
15、本实用新型用于驱动电子水阀的电机为直流电机,同时电子水阀执行器内无需设置位置传感器,因此本实用新型的热管理域控制器与电子水阀执行器之间仅需要通过两根连接线连接,减少了连接线束的数量;本实用新型利用热管理域控制器中设置的电流信号检测模块对电机工作电流信号进行监测,以获取水阀阀芯的实时位置,电流信号检测模块可由运放及阻容元件等组成,结构简单,成本较低且易于小型化。
16、本实用新型在电机驱动模块中串联采样电阻,电流信号检测模块连接采样电阻的两端,用于通过采样电阻获取驱动模块的干净清晰的电流波形,将电流纹波信号处理转化为脉冲信号,通过对电流波形脉冲信号进行计数,结合电机的电刷数量和换相器数量,即可获得电机输出轴的转动圈数,随后结合齿轮传动机构的传动减速比,即可获得电子水阀执行器驱动水阀阀芯转动的角度信息,能够获取阀芯的实时位置,能够获取电子水阀的当前状态,便于根据阀芯当前位置对水阀状态进行调整。
技术特征:
1.一种电子水阀控制装置,包括热管理域控制器和电子水阀执行器,所述热管理域控制器包括微控制器和驱动模块,所述驱动模块与所述电子水阀执行器内直流电机电性连接,其特征在于:所述热管理域控制器还包括电流信号检测模块,所述电流信号检测模块输入端与所述驱动模块电性连接,输出端与所述微控制器电性连接,用于监测所述电机的电流信号。
2.根据权利要求1所述的电子水阀控制装置,其特征在于:所述电流信号检测模块包括按照信号传输方向依次电性连接的电流感测级、带通滤波器级、差分放大级和比较器级,所述电流感测级的输入端与所述驱动模块中串联的采样电阻的两端电性连接,所述比较器级的输出端与所述微控制器电性连接。
3.根据权利要求2所述的电子水阀控制装置,其特征在于:所述电流感测级用于放大电流信号;所述带通滤波器级用于消除电流信号中的dc分量和外部噪声;所述差分放大级用于在保留纹波频率分量的同时消除高电流尖峰的影响;所述比较器级用于输出0v或5v的信号脉冲。
4.根据权利要求2所述的电子水阀控制装置,其特征在于:所述微控制器用于计数所述比较器级输出的信号脉冲。
5.根据权利要求2所述的电子水阀控制装置,其特征在于:所述采样电阻串联在所述驱动模块的接地端。
6.根据权利要求2所述的电子水阀控制装置,其特征在于:所述比较器级采用反相迟滞结构。
7.根据权利要求1所述的电子水阀控制装置,其特征在于:所述驱动模块中包括h桥驱动电路。
8.根据权利要求7所述的电子水阀控制装置,其特征在于:所述h桥驱动电路包括四个功率mosfet。
9.根据权利要求8所述的电子水阀控制装置,其特征在于:所述微控制器与所述驱动模块之间还串联有预驱模块。
10.根据权利要求9所述的电子水阀控制装置,其特征在于:所述预驱模块包括用于驱动所述驱动模块中所述功率mosfet的mosfet驱动单元。
技术总结
本技术提供了一种电子水阀控制装置,属于新能源汽车电子水阀技术领域。包括热管理域控制器和电子水阀执行器,所述热管理域控制器包括微控制器、驱动模块和电流信号检测模块,所述驱动模块与微控制器以及电子水阀执行器内直流电机电性连接,所述电流信号检测模块输入端与所述驱动模块电性连接,输出端与所述微控制器电性连接,用于监测所述电机的电流信号。本技术减少了热管理域控制器与电子水阀执行器间连接线束的数量,并通过热管理域控制器中电流信号检测模块将电机电流信号转化为微控制器可读的脉冲信号,以获取水阀阀芯的实时位置,因此电子水阀执行器内无需再设置位置传感器,能够降低电子水阀控制部件的成本且易于小型化。
技术研发人员:张俊生,孙凯
受保护的技术使用者:上海飞龙新能源汽车部件有限公司
技术研发日:20230822
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!