一种新型惯性测量管道机器人柔性后驱驱动装置的制作方法
本技术涉及柔性后驱驱动设备,具体为一种新型惯性测量管道机器人柔性后驱驱动装置。
背景技术:
1、随着现代都市的飞速发展,地下管道网络系统日益发达,电力、电信、燃气、给排水、雨污水等各类管道蛛网密布,错综复杂。然而由于历史与技术原因,已建成的地下管线很少能够提供准确的管线位置与埋深,影响到日渐庞大的管网系统的管理与维护。如何精准地探测地下管线如电力管线的位置与埋深,已成为急需解决的问题,传统管线探测方法多采用物探方法,或利用电磁场感应金属管线的位置与埋深(如管线仪探测),或利用管线与周边介质的物性差异进行探查(如地质雷达探测)。这些方法虽有其优势之处,但往往受制于管线材质、埋设深度、环境干扰、定位精度等因素,使其测量精度大打折扣。而电力管线常采用非开挖定向穿越,其埋深往往超越现有仪器的探测范围,更是使得这些方法英雄无用武之处。惯性陀螺定位仪三维定位技术是近年来出现的一项管线测量新技术。它结合了陀螺仪定向、惯性导航、计算机三维计算等技术,拖曳惯性陀螺定位仪穿行于待测管线,自动追踪记录其在管线内的运动轨迹,生成管道中心轴线的三维坐标与位置图。测量时受管线材质、管线埋深、周围环境和地质影响较小,只要惯性陀螺定位仪能够穿行于待测管线,即可实现高精确度的管线测量,但是现有的支撑轮系对管壁压力大、摩擦力大、轮系运行阻力大,轮系的使用寿命短且不能够实现滑移架的真正锁死紧固,无法保证陀螺仪的探测精度。
2、为了解决上述技术问题,授权公告号为cn215674258u的中国实用新型专利公开了一种地下管线惯性陀螺定位仪的运动承载轮系系统,该实用新型通过长支臂和短支臂构成的杠杆,使得轮系对管壁支撑力较小,运行阻力较小,可减小行走轮的摩擦力,延长行走轮的使用寿命;并且通过滑移架微调抱死组件可实现轮系对管径自适应,且轮系对管壁压力可调,不存在前进后退时轮系死角;此外,滑移架在防转导杆上滑动,可保证滑移架移动时的直线性,从而保证行走轮位置不偏移;
3、虽然该实用新型提供的技术方案解决了现有的测量机器人用轮系系统寿命短、测量精度低的问题,但是上述的方案中并没有设置相关的驱动装置,而现有的用于进行驱动的机构往往采用刚性驱动的方式,而采用这种方式来进行驱动测量机器人,会在驱动的瞬间因牵引力的作用造成测量机器人微量点头及仰头,进而就会导致测量全程初始误差累积叠加问题,影响测量结果的准确性。
技术实现思路
1、本实用新型的目的在于提供一种新型惯性测量管道机器人柔性后驱驱动装置,以解决上述背景技术中提出的问题。
2、本申请实施例采用下述技术方案:
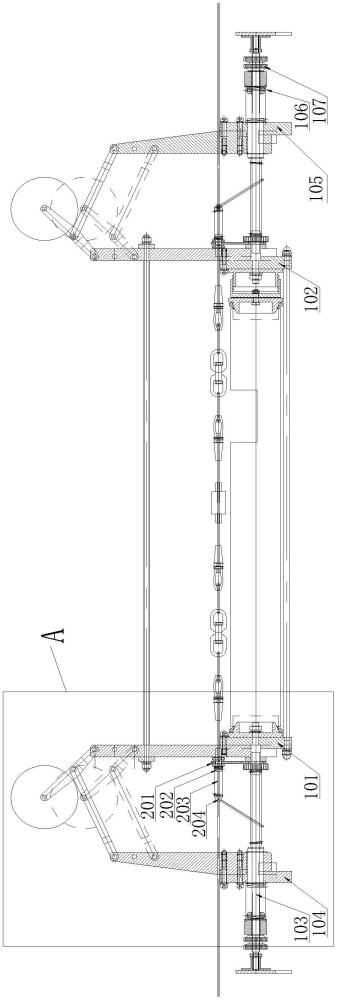
3、一种新型惯性测量管道机器人柔性后驱驱动装置,包括用于安装柔性驱动装置的前法兰、后法兰和中心直轨,所述测量机器人设置在中心直轨上,所述柔性驱动装置包括两个后驱推力板,两个所述后驱推力板分别设置在测量机器人的两侧,两个所述后驱推力板相背的一侧均设置有推力弹簧和钢绳推力锁,所述推力弹簧设置在相邻的后驱推力板和钢绳推力锁之间。
4、有益效果:
5、本实用新型通过驱动钢绳推力锁进行移动,能够挤压推力弹簧进行收缩,进而能够通过推力弹簧的回弹力对后驱推力板施加推力,当推力弹簧的回弹力大于测量机器人自身的重力以及阻力后,就能够通过后驱推力板驱动测量机器人进行移动,从而实现对测量机器人的柔性驱动,避免测量机器人在驱动的瞬间因牵引力的作用造成测量机器人微量点头及仰头,从而保证测量数据以及结果的准确性。
6、优选的,所述后驱推力板的底部固定安装在中心直轨上,所述后驱推力板的顶部与用于驱动测量机器人的拖拽锁具固定连接。
7、优选的,所述拖拽锁具上设置有一推力导管,所述推力导管呈空心状且套接在拖拽锁具上,所述推力弹簧的数量为两个且分别位于推力导管的两端。
8、优选的,其中一个所述推力弹簧位于后驱推力板和推力导管之间,另一个所述推力弹簧位于推力导管和钢绳推力锁之间,所述钢绳推力锁固定在拖拽锁具上。
9、优选的,所述中心直轨上滑动连接有后驱直轨滑块,所述后驱直轨滑块的一侧设置有后驱压缩弹簧,所述后驱压缩弹簧套接在中心直轨上且位于测量机器人和后驱直轨滑块之间。
10、优选的,所述后驱直轨滑块顶部固定连接有用于拖拽其滑动的后驱拖拽钢绳,所述后驱拖拽钢绳的另一端与外部的动力源固定连接。
11、优选的,所述后驱拖拽钢绳上依次安装有后驱拖拽换向锁、后驱拖拽防扭八字、拖拽锁具和后驱拖拽强力别针。
技术特征:
1.一种新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,包括用于安装柔性驱动装置的前法兰、后法兰和中心直轨,所述中心直轨上滑动连接有后驱直轨滑块,所述后驱直轨滑块的一侧设置有后驱压缩弹簧,所述后驱压缩弹簧套接在中心直轨上且位于测量机器人和后驱直轨滑块之间。
2.根据权利要求1所述的新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,所述后驱直轨滑块顶部固定连接有用于拖拽其滑动的后驱拖拽钢绳,所述后驱拖拽钢绳的另一端与外部的动力源固定连接。
3.根据权利要求2所述的新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,所述后驱拖拽钢绳上依次安装有后驱拖拽换向锁、后驱拖拽防扭八字、拖拽锁具和后驱拖拽强力别针。
4.根据权利要求1所述的新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,所述测量机器人设置在中心直轨上,所述柔性驱动装置包括两个后驱推力板,两个所述后驱推力板分别设置在测量机器人的两侧,两个所述后驱推力板相背的一侧均设置有推力弹簧和钢绳推力锁,所述推力弹簧设置在相邻的后驱推力板和钢绳推力锁之间。
5.根据权利要求4所述的新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,所述后驱推力板的底部固定安装在中心直轨上,所述后驱推力板的顶部与用于驱动测量机器人的拖拽锁具固定连接。
6.根据权利要求5所述的新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,所述拖拽锁具上设置有一推力导管,所述推力导管呈空心状且套接在拖拽锁具上,所述推力弹簧的数量为两个且分别位于推力导管的两端。
7.根据权利要求6所述的新型惯性测量管道机器人柔性后驱驱动装置,其特征在于,其中一个所述推力弹簧位于后驱推力板和推力导管之间,另一个所述推力弹簧位于推力导管和钢绳推力锁之间,所述钢绳推力锁固定在拖拽锁具上。
技术总结
本技术涉及柔性后驱驱动设备技术领域,且公开了一种新型惯性测量管道机器人柔性后驱驱动装置,包括用于安装柔性驱动装置的前法兰、后法兰和中心直轨,所述中心直轨上滑动连接有后驱直轨滑块,所述后驱直轨滑块的一侧设置有后驱压缩弹簧,所述后驱压缩弹簧套接在中心直轨上且位于测量机器人和后驱直轨滑块之间。该新型惯性测量管道机器人柔性后驱驱动装置,通过驱动钢绳推力锁进行移动,能够挤压推力弹簧进行收缩,进而能够通过推力弹簧的回弹力对后驱直轨滑块施加推力,当推力弹簧的回弹力大于测量机器人自身的重力以及滚动摩擦阻力后,就能够通过后驱直轨滑块驱动测量机器人进行移动,从而实现对测量机器人的柔性驱动。
技术研发人员:张俊卿,张琳,侯立国,闫捷,张子阳,吴京羽,田昱,尼森,鲍明玮,贺晓森,赵茜茜,曹璐
受保护的技术使用者:唐山市中宇科技发展有限公司
技术研发日:20230828
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!