一种低拖滞制动器及一种电子机械制动系统的制作方法
本技术涉及车辆制动领域,尤其涉及了一种低拖滞制动器及一种电子机械制动系统。
背景技术:
1、epb是电机转速经减速后通过螺杆螺套将电机的转动转变成螺套的直线运动,从而推动活塞的直线运动存在缺陷迟滞原先epb用于驻车制动及行车运动,介质是制动液,活塞与螺套是单独零件,液压制动时候或者驻车时候活塞与螺套存在间隙的,如果无间隙,会导致活塞回不了位置,出现脱膜现象。比如中国专利cn202320150888.1-电子驻车制动器壳体总成和电子驻车制动器即公开了上述结构的制动器。
技术实现思路
1、本实用新型针对现有技术中的缺点,提供了一种低拖滞制动器。
2、为了解决上述技术问题,本实用新型通过下述技术方案得以解决:
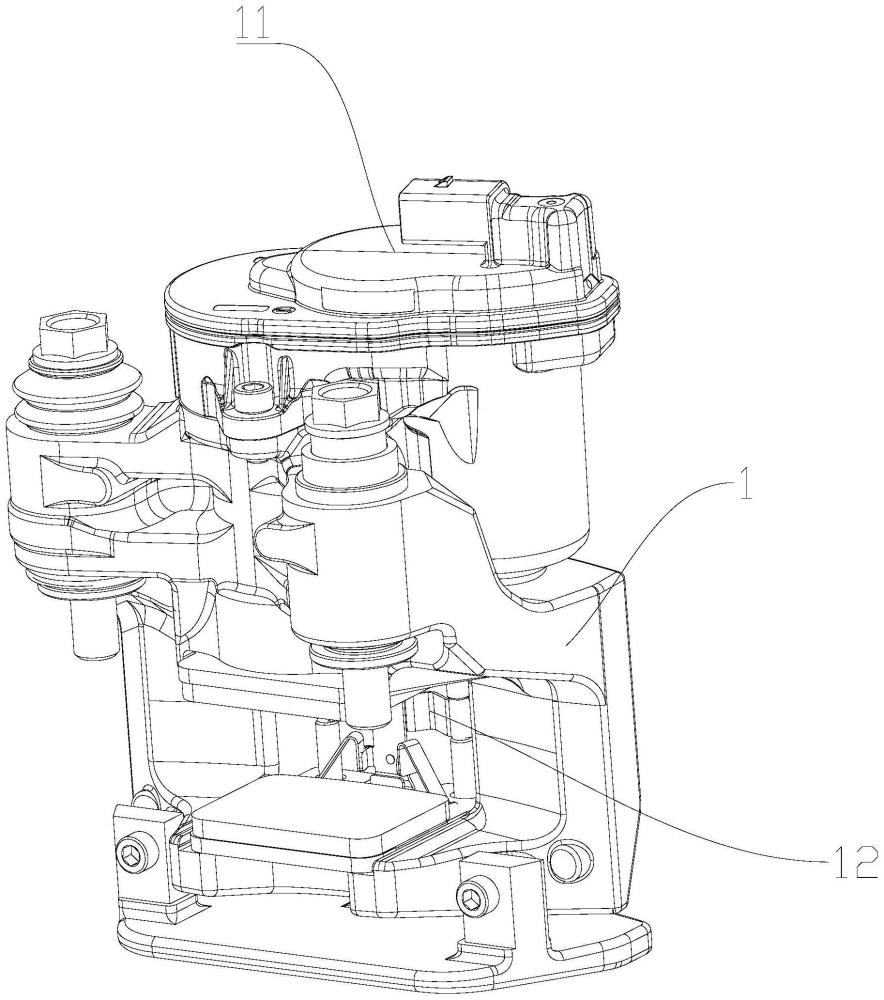
3、一种低拖滞制动器,包括钳体,钳体包括上端传动腔,传动腔内安装也有螺杆,螺杆上装配有螺套单元,螺套单元包括与螺杆配合的螺套以及外部用于和传动腔内壁滑动接触的活塞,活塞和螺套为一体式结构,活塞下端连接有的制动块。
4、作为优选,活塞的侧壁设置有限位槽,钳体的外壁上设置有限位柱,限位柱延伸至限位槽内,限位柱用于限制活塞的旋转。
5、作为优选,限位槽沿活塞的外壁圆周方向均匀分布,限位槽内设置有润滑脂。
6、作为优选,限位槽的下端面为轴向限制面。
7、作为优选,螺杆通过轴承座安装在传动腔内,还包括驱动机构,驱动结构与螺杆连接带动螺杆转动。
8、作为优选,还包括弹性回位机构,弹性回位机构包括横向设置的第一弹性支撑臂和轴向设置的第二弹性支撑臂,第一弹性支撑臂和第二弹性支撑臂连接组成“十”字形支撑架;还包括支撑翼,支撑翼安装在第二弹性支撑臂上,支撑翼支撑在上制动块以及下制动块靠近制动盘的侧面上。
9、作为优选,支撑翼有两组,一组支撑在上制动块的两端,一组设置在第二弹性支撑臂的下端且支撑在下制动块的两端;支撑翼包括中间的连接部以及连接在连接部两端的支撑爪,连接臂的两端向内侧弯折形成连接片,支撑爪为v形结构,包括焊接在连接片上的短臂以及抵触在制动块上的长臂,短臂和常臂通过一根簧板或簧条弯折形成。
10、作为优选,连接部两端的连接片向连接部的中间位置弯折,短臂(28)与连接片平行设置。
11、作为优选,连接部和支撑爪为簧片弯折一体成型结构,所述的第二弹性支撑臂的边部向内侧弯折形成支撑板,连接片与支撑板焊接固定;上制动块以及下制动块的钳背侧中部均设置有卡槽,第二弹性支撑臂上下两端分别抵触在上制动块以及下制动块的卡槽内,卡槽两侧的制动块上插接有导杆,导杆用于对上制动块以及下制动块导向;还包括设置在活塞下端的密封罩,活塞的下端为直径小于传动腔内径的柱体,柱体的侧面沿圆周面设置有装配槽一,钳体下端设置有开口向下的装配槽二,装配槽二设置在传动腔下端开口的周围且与装配槽二同轴线设置,密封罩的第一密封唇边卡设在装配槽一内,密封罩的第二密封唇卡设在装配槽二内。
12、一种电子机械制动系统,包括上述的低拖滞制动器,还包括控制器,控制器与制动器的驱动机构连接,控制器根据接收的信号控制驱动机构输出的驱动力。
13、本实用新型由于采用了以上技术方案,具有如下显著的技术效果:
14、本实用新型公开了一种低拖滞制动器,该驻车通过对现有技术中螺套与活塞的结构设计实现传动无延迟,制动无卡滞,而且回位精准等优点。
技术特征:
1.一种低拖滞制动器,其特征在于:包括钳体(1),钳体(1)包括上端传动腔(2),传动腔(2)内安装也有螺杆(3),螺杆(3)上装配有螺套单元(4),螺套单元(4)包括与螺杆(3)配合的螺套(5)以及外部用于和传动腔(2)内壁滑动接触的活塞(6),活塞(6)和螺套(5)为一体式结构,活塞(6)下端连接有的制动块。
2.根据权利要求1所述的一种低拖滞制动器,其特征在于:活塞(6)的侧壁设置有限位槽(7),钳体(1)的外壁上设置有限位柱(8),限位柱(8)延伸至限位槽(7)内,限位柱(8)用于限制活塞(6)的旋转。
3.根据权利要求2所述的一种低拖滞制动器,其特征在于:限位槽(7)沿活塞(6)的外壁圆周方向均匀分布,限位槽(7)内设置有润滑脂。
4.根据权利要求3所述的一种低拖滞制动器,其特征在于:限位槽(7)的下端面为轴向限制面(10)。
5.根据权利要求3所述的一种低拖滞制动器,其特征在于:螺杆(3)通过轴承座安装在传动腔(2)内,还包括驱动机构(11),驱动结构与螺杆(3)连接带动螺杆(3)转动。
6.根据权利要求1所述的一种低拖滞制动器,其特征在于:还包括弹性回位机构(12),弹性回位机构(12)包括横向设置的第一弹性支撑臂(13)和轴向设置的第二弹性支撑臂(14),第一弹性支撑臂(13)和第二弹性支撑臂(14)连接组成“十”字形支撑架;还包括支撑翼(15),支撑翼(15)安装在第二弹性支撑臂(14)上,支撑翼(15)支撑在上制动块(19)以及下制动块(20)靠近制动盘的侧面上。
7.根据权利要求6所述的一种低拖滞制动器,其特征在于:支撑翼(15)有两组,一组支撑在上制动块(19)的两端,一组设置在第二弹性支撑臂(14)的下端且支撑在下制动块(20)的两端;支撑翼(15)包括中间的连接部(16)以及连接在连接部(16)两端的支撑爪(17),连接臂的两端向内侧弯折形成连接片(18),支撑爪(17)为v形结构,包括焊接在连接片(18)上的短臂(28)以及抵触在制动块上的长臂(29),短臂(28)和常臂通过一根簧板或簧条弯折形成。
8.根据权利要求7所述的一种低拖滞制动器,其特征在于:连接部(16)两端的连接片(18)向连接部(16)的中间位置弯折,短臂(28)与连接片(18)平行设置。
9.根据权利要求7所述的一种低拖滞制动器,其特征在于:连接部(16)和支撑爪(17)为簧片弯折一体成型结构,所述的第二弹性支撑臂(14)的边部向内侧弯折形成支撑板,连接片(18)与支撑板焊接固定;上制动块(19)以及下制动块(20)的钳背侧中部均设置有卡槽(23),第二弹性支撑臂(14)上下两端分别抵触在上制动块(19)以及下制动块(20)的卡槽(23)内,卡槽(23)两侧的制动块上插接有导杆(24),导杆(24)用于对上制动块(19)以及下制动块(20)导向;还包括设置在活塞(6)下端的密封罩(27),活塞(6)的下端为直径小于传动腔(2)内径的柱体,柱体的侧面沿圆周面设置有装配槽一(21),钳体(1)下端设置有开口向下的装配槽二(22),装配槽二(22)设置在传动腔(2)下端开口的周围且与装配槽二(22)同轴线设置,密封罩(27)的第一密封唇(25)边卡设在装配槽一(21)内,密封罩(27)的第二密封唇(26)卡设在装配槽二(22)内。
10.一种电子机械制动系统,其特征在于:包括权利要求1至9任意一种所述的低拖滞制动器,还包括控制器,控制器与制动器的驱动机构(11)连接,控制器根据接收的信号控制驱动机构(11)输出的驱动力。
技术总结
本技术涉及制动领域,公开了一种低拖滞制动器及一种电子机械制动系统,包括钳体(1),钳体(1)包括上端传动腔(2),传动腔(2)内安装也有螺杆(3),螺杆(3)上装配有螺套单元(4),螺套单元(4)包括与螺杆(3)配合的螺套(5)以及外部用于和传动腔(2)内壁滑动接触的活塞(6),活塞(6)和螺套(5)为一体式结构,活塞(6)下端连接有的制动块。该制动器具有响应快,控制准无拖滞等优点。
技术研发人员:边届,顾航斌,周哉松,刘海峰,李剑,韩万龙
受保护的技术使用者:浙江万安智驭汽车控制系统有限公司
技术研发日:20230831
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!