一种阻尼结构、主手遥杆及手术机器人的制作方法
本申请涉及医疗器械,特别涉及一种阻尼结构、主手遥杆及手术机器人。
背景技术:
1、外科医生进行微创手术过程中,直接操作主控遥杆,主控遥杆记录医生的手部动作,并将其传递给从端手术器械。从端手术器械实时跟踪主控遥杆运动来进行手术操作。因此,操纵杆是手控操作系统的重要设备,直接影响手术的效果及成功率。
2、随着模拟仿真技术的发展,对手动操控需求量不断增多,如手术机器人、主控遥杆、机械臂等的随动控制。现实条件下,大多采用摩擦控制,效果差不好调节;或者采用电机调节阻尼,成本高。因此,现有的摇杆阻尼特性不可调,用户遥感体验效果不佳。
技术实现思路
1、本申请实施例的目的在于提供一种阻尼结构,通过在转动组件上设置用于加注阻尼油脂的凹型腔,在转动组件转动时,搅动件随着转动组件旋转时,对阻尼油脂进行搅匀,使阻尼油脂充分填充于主转动轴内,从而调节转动组件腔内的阻尼压力,改善主转动轴的旋转手感,进而改善主手遥杆操作无阻尼时过于顺滑不适合高精度的细微操作的手感。
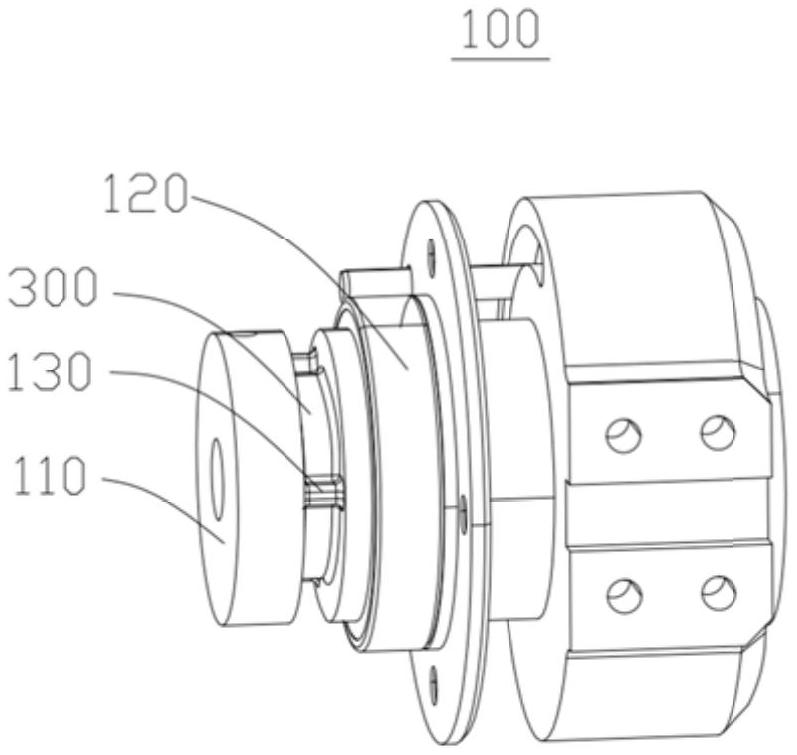
2、第一方面,本申请提供一种阻尼结构包括:转动组件,以及安装于所述转动组件上且能绕所述转动组件旋转的主控组件;所述转动组件与所述主控组件的安装接触位置处设有凹型腔,所述凹型腔用于注入阻尼油脂;所述转动组件上设有多个搅动件,在所述转动组件转动时,所述搅动件对所述阻尼油脂进行搅匀以调节阻尼压力。
3、于一实施例中,所述转动组件包括:主转动轴以及轴承座,所述凹型腔设于所述主转动轴与所述轴承座的接触位置处。
4、于一实施例中,所述搅动件设置于位于所述凹型腔处的所述主转动轴上。
5、于一实施例中,所述搅动件按照旋转方向阵列分布于所述转动组件上。
6、于一实施例中,所述主控组件包括:转动部,以及连接在所述转动部上的安装部,所述转动部设于所述转动组件上,所述安装部上用于安装主控线路板;所述凹型腔被容纳于所述转动部内,所述安装部上设有多个调节孔,通过调节件穿过所述调节孔,对注入到所述凹型腔内的阻尼油脂进行封堵。
7、于一实施例中,所述调节件能相对所述调节孔的位置改变,以调节所述阻尼油脂在所述凹型腔内的阻尼压力。
8、第二方面,本申请提供一种主手遥杆,包括如本申请第一方面任一项实施例所述的阻尼结构,以及第一转动副、第二转动副、移动副以及控制部;所述阻尼结构设于所述第一转动副上,所述第一转动副的旋转轴线与所述第二转动副的旋转轴线相互垂直;所述移动副相对所述第二转动副进行直线移动,所述控制部连接所述移动副。
9、于一实施例中,所述第一转动副还包括:第一旋转组件,所述第一旋转组件与所述阻尼结构连接,所述第一旋转组件上设有第一编码器。
10、于一实施例中,所述第二转动副包括:第二主转动组件、第二副转动组件,所述第二主转动组件与所述第二副转动组件通过转接部连接;所述第二主转动组件与所述转动组件通过连接部传动连接;所述第二主转动组件上设有第二编码器,所述第二副转动组件上设有第三编码器。
11、于一实施例中,所述移动副包括:连接支架、齿条;所述连接支架设于所述转接部上,所述齿条设于所述连接支架上;所述第二副转动组件上还设有传动齿轮,所述传动齿轮与所述齿条啮合,以实现所述移动副相对所述第二转动副进行直线移动。
12、于一实施例中,所述主手遥杆还包括:壳体,所述壳体连接于所述第一转动副、所述第二转动副、所述移动副以及所述控制部上。
13、第三方面,本申请提供一种手术机器人,包括如本申请第二方面任一项实施例所述的主手遥杆。
14、本申请的技术方案,通过在转动组件上设置用于加注阻尼油脂的凹型腔,在转动组件转动时,搅动件随着转动组件旋转时,对阻尼油脂进行搅匀,使阻尼油脂充分填充于主转动轴内,从而调节转动组件腔内的阻尼压力,改善主转动轴的旋转手感,进而改善主手遥杆操作无阻尼时过于顺滑不适合高精度的细微操作的手感。
15、本申请中,可以通过在第一转动副、第二转动副上均设置阻尼结构,以调节各个转动副上的旋转手感,提高主手遥杆的操作性能。
16、采用设置有阻尼结构的主手遥杆进行手术操作时,手术效率得以提高。
技术特征:
1.一种阻尼结构,其特征在于,包括:转动组件,以及安装于所述转动组件上且能绕所述转动组件旋转的主控组件;
2.根据权利要求1所述的阻尼结构,其特征在于,所述转动组件包括:主转动轴以及轴承座,所述凹型腔设于所述主转动轴与所述轴承座的接触位置处。
3.根据权利要求2所述的阻尼结构,其特征在于,所述搅动件设置于位于所述凹型腔处的所述主转动轴上。
4.根据权利要求1-3任一项所述的阻尼结构,其特征在于,所述搅动件按照旋转方向阵列分布于所述转动组件上。
5.根据权利要求1所述的阻尼结构,其特征在于,所述主控组件包括:转动部,以及连接在所述转动部上的安装部,所述转动部设于所述转动组件上,所述安装部上用于安装主控线路板;
6.根据权利要求5所述的阻尼结构,其特征在于,所述调节件能相对所述调节孔的位置改变,以调节所述阻尼油脂在所述凹型腔内的阻尼压力。
7.一种主手遥杆,其特征在于,包括如权利要求1至6任一项所述的阻尼结构,以及第一转动副、第二转动副、移动副以及控制部;
8.根据权利要求7所述的主手遥杆,其特征在于,所述第一转动副还包括:第一旋转组件,所述第一旋转组件与所述阻尼结构连接,所述第一旋转组件上设有第一编码器。
9.根据权利要求7所述的主手遥杆,其特征在于,所述第二转动副包括:第二主转动组件、第二副转动组件,所述第二主转动组件与所述第二副转动组件通过转接部连接;所述第二主转动组件与所述转动组件通过连接部传动连接;所述第二主转动组件上设有第二编码器,所述第二副转动组件上设有第三编码器。
10.根据权利要求9所述的主手遥杆,其特征在于,所述移动副包括:连接支架、齿条;所述连接支架设于所述转接部上,所述齿条设于所述连接支架上;所述第二副转动组件上还设有传动齿轮,所述传动齿轮与所述齿条啮合,以实现所述移动副相对所述第二转动副进行直线移动。
11.根据权利要求7至10任一项所述的主手遥杆,其特征在于,所述主手遥杆还包括:壳体,所述壳体连接于所述第一转动副、所述第二转动副、所述移动副以及所述控制部上。
12.一种手术机器人,其特征在于,包括如权利要求7至11任一项所述的主手遥杆。
技术总结
本申请提供一种阻尼结构、主手遥杆及手术机器人,阻尼结构包括:转动组件,以及安装于转动组件上且能绕转动组件旋转的主控组件;转动组件与主控组件的安装接触位置处设有凹型腔,凹型腔用于注入阻尼油脂;转动组件上设有多个搅动件,在转动组件转动时,搅动件对阻尼油脂进行搅匀以调节阻尼压力。本申请通过在转动组件上设置用于加注阻尼油脂的凹型腔,在转动组件转动时,搅动件随着转动组件旋转时,对阻尼油脂进行搅匀,使阻尼油脂充分填充于主转动轴内,从而调节转动组件腔内的阻尼压力,改善主转动轴的旋转手感,进而改善主手遥杆操作无阻尼时过于顺滑不适合高精度的细微操作的手感。
技术研发人员:陈能,王悦,崔迪
受保护的技术使用者:杭州迪视医疗生物科技有限公司
技术研发日:20231016
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!