一种水电巡检机器人的制作方法
本技术涉及巡检设备,具体涉及一种水电巡检机器人。
背景技术:
1、水电设备集中运行的厂区、变电所等地,为了保证设备的正常使用,需要定期对水电设备进行一系列日常巡检活动,观察水电设备的运行情况是否正常,从而保证水电设备的稳定运行并及时的发现水电设备的问题,避免危险发生。但现有的水电设备巡检一般均是人为进行观察巡检,而一些水电设备的外侧一般均设置有保护箱,当其内部因零件老化等原因发生失火时,失火的部位较小,从外侧很难发现,从而很多水电设备发生起火时则已经很难控制,使得水电设备损伤较大。
技术实现思路
1、本实用新型的目的在于提供一种水电巡检机器人。
2、本实用新型的目的可以通过以下技术方案实现:
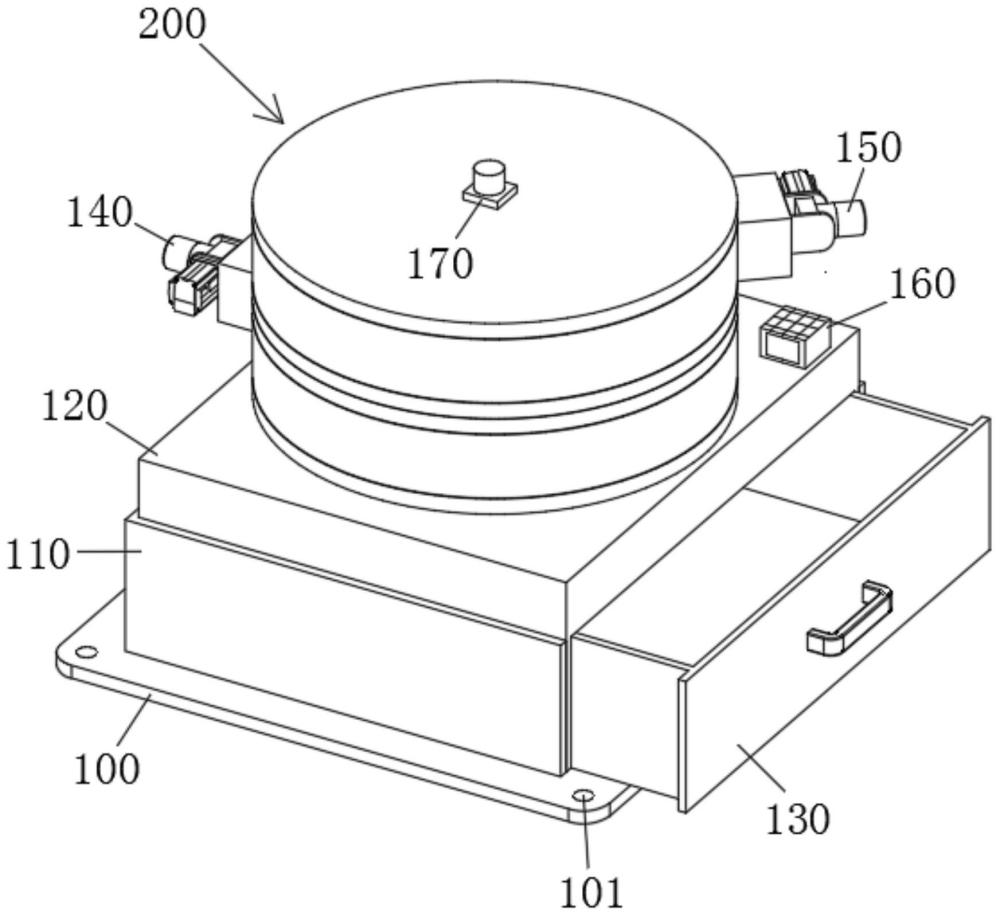
3、一种水电巡检机器人,包括安装板,所述安装板的四个边角位置处均开设有安装孔,所述安装板的顶部固连有匚型板,所述匚型板的顶部滑动连接有移动壳,所述安装板一端的顶部固连有电动推杆,且电动推杆输出端与移动壳的内顶面固连,所述移动壳的顶部固连有控制器,所述移动壳的顶部设置有摄像仪和红外热成像测温仪,且摄像仪和红外热成像测温仪上配套设置有调整机构,所述移动壳的顶部设置有警报器。
4、进一步在于,所述移动壳一侧的底部开设有连接缺口,所述安装板的顶部设置有储存盒,且储存盒一端与连接缺口滑动连接。
5、进一步在于,所述调整机构包括圆环,所述圆环的顶部和底部均设置有圆壳,且两个圆壳相对,两个所述圆壳的内部设置有匚型杆,且匚型杆两端分别与对应位置处的圆壳固连,所述圆环的内部设置有电机一,且电机一一端与对应位置处的圆壳固连,所述电机一的输出端固连有齿轮,所述圆环的内侧壁固连有齿环,且齿环与齿轮啮合,所述圆环的外侧设置有移动单元,所述警报器底部与对应位置处的圆壳固连。
6、进一步在于,所述圆壳的一侧开设有弧形槽,所述圆环的顶部与底部均转动连接有转动球,且转动球与对应位置处的弧形槽滑动连接。
7、进一步在于,所述圆壳的外径与圆环的外径相同,所述圆壳的内径大于圆环的内径。
8、进一步在于,所述移动单元包括固定壳,所述固定壳一侧与圆环的外侧固连,所述固定壳的另一侧开设有转动孔,且转动孔的内部转动连接圆板,所述圆板的一侧固连有固定座,且固定座的内部通过轴杆转动有连接板,所述摄像仪和红外热成像测温仪一端分别与对应位置处的连接板固连,所述固定座的一侧固连有电机三,且电机三输出端贯穿固定座侧壁与轴杆的一端固连。
9、进一步在于,所述固定壳的一内侧壁固连有电机二,且电机二输出端与圆板的另一侧固连。
10、本实用新型的有益效果:
11、1、通过在摄像仪和红外热成像测温仪上配套设置有调整机构,并通过启动电动推杆,使得两个调整机构、摄像仪和红外热成像测温仪移动至适当高度,利用摄像仪便于对水电设备进行拍摄监视,且利用红外热成像测温仪和控制器配合使用便于对水电设备的温度进行监视,当水电设备内部的温度超过警戒线时警报器进行预警,从而便于巡检人员进行快速应急处理,进而避免水电设备因温度过高而出现失火的情况发生,提高了该水电巡检机器人的巡检效果,再利用调整机构便于改变摄像仪和红外热成像测温仪的拍摄角度,使得摄像仪和红外热成像测温仪能够对水电设备的不同位置进行监视,进而提高了该水电巡检机器人的实用性。
技术特征:
1.一种水电巡检机器人,包括安装板(100),其特征在于,所述安装板(100)的四个边角位置处均开设有安装孔(101),所述安装板(100)的顶部固连有匚型板(110),所述匚型板(110)的顶部滑动连接有移动壳(120),所述安装板(100)一端的顶部固连有电动推杆(180),且电动推杆(180)输出端与移动壳(120)的内顶面固连,所述移动壳(120)的顶部固连有控制器(160),所述移动壳(120)的顶部设置有摄像仪(140)和红外热成像测温仪(150),且摄像仪(140)和红外热成像测温仪(150)上配套设置有调整机构(200),所述移动壳(120)的顶部设置有警报器(170)。
2.根据权利要求1所述的一种水电巡检机器人,其特征在于,所述移动壳(120)一侧的底部开设有连接缺口(121),所述安装板(100)的顶部设置有储存盒(130),且储存盒(130)一端与连接缺口(121)滑动连接。
3.根据权利要求1所述的一种水电巡检机器人,其特征在于,所述调整机构(200)包括圆环(220),所述圆环(220)的顶部和底部均设置有圆壳(210),且两个圆壳(210)相对,两个所述圆壳(210)的内部设置有匚型杆(240),且匚型杆(240)两端分别与对应位置处的圆壳(210)固连,所述圆环(220)的内部设置有电机一(250),且电机一(250)一端与对应位置处的圆壳(210)固连,所述电机一(250)的输出端固连有齿轮(251),所述圆环(220)的内侧壁固连有齿环(260),且齿环(260)与齿轮(251)啮合,所述圆环(220)的外侧设置有移动单元(270),所述警报器(170)底部与对应位置处的圆壳(210)固连。
4.根据权利要求3所述的一种水电巡检机器人,其特征在于,所述圆壳(210)的一侧开设有弧形槽(211),所述圆环(220)的顶部与底部均转动连接有转动球(230),且转动球(230)与对应位置处的弧形槽(211)滑动连接。
5.根据权利要求3所述的一种水电巡检机器人,其特征在于,所述圆壳(210)的外径与圆环(220)的外径相同,所述圆壳(210)的内径大于圆环(220)的内径。
6.根据权利要求3所述的一种水电巡检机器人,其特征在于,所述移动单元(270)包括固定壳(271),所述固定壳(271)一侧与圆环(220)的外侧固连,所述固定壳(271)的另一侧开设有转动孔,且转动孔的内部转动连接圆板(273),所述圆板(273)的一侧固连有固定座(274),且固定座(274)的内部通过轴杆转动有连接板(276),所述摄像仪(140)和红外热成像测温仪(150)一端分别与对应位置处的连接板(276)固连,所述固定座(274)的一侧固连有电机三(275),且电机三(275)输出端贯穿固定座(274)侧壁与轴杆的一端固连。
7.根据权利要求6所述的一种水电巡检机器人,其特征在于,所述固定壳(271)的一内侧壁固连有电机二(272),且电机二(272)输出端与圆板(273)的另一侧固连。
技术总结
本技术涉及巡检设备技术领域,具体涉及一种水电巡检机器人,包括安装板,所述安装板的四个边角位置处均开设有安装孔,所述安装板的顶部固连有匚型板,所述匚型板的顶部滑动连接有移动壳。本技术中,通过在摄像仪和红外热成像测温仪上配套设置有调整机构,并通过启动电动推杆,使得两个调整机构、摄像仪和红外热成像测温仪移动至适当高度,利用摄像仪便于对水电设备进行拍摄监视,且利用红外热成像测温仪和控制器配合使用便于对水电设备的温度进行监视,当水电设备内部的温度超过警戒线时警报器进行预警,从而便于巡检人员进行快速应急处理,进而避免水电设备因温度过高而出现失火的情况发生,提高了该水电巡检机器人的巡检效果。
技术研发人员:徐敏,梁林奇,王小敏,梁益
受保护的技术使用者:玉环市环光水利建设工程有限公司
技术研发日:20231030
技术公布日:2024/5/19
- 还没有人留言评论。精彩留言会获得点赞!