一种中孔摆线针减速机构和机器人的制作方法
本技术涉及协作机器人、工业机器人、服务机器人,特别是涉及一种中孔摆线针减速机构和机器人。
背景技术:
1、摆线针减速机构可以应用在机械人上,机械人具有机械臂,摆线针减速机构的输出法兰可以与机械臂连接,以驱动机械臂转动。为了对机械臂的运动进行控制,机械臂上具有很多线缆,这些线缆有些用于传输信号,有些为电源线与电源连接。这些线缆在机械臂运动过程中容易发生缠绕,影响机械臂的运动,故急需针对这种情况进行解决。
技术实现思路
1、有鉴于此,本实用新型提供一种中孔摆线针减速机构和机器人,主要所要解决的技术问题是:如何对摆线针减速机构的驱动对象上的线缆进行理顺,防止线缆发生缠绕。
2、为达到上述目的,本实用新型主要提供如下技术方案:
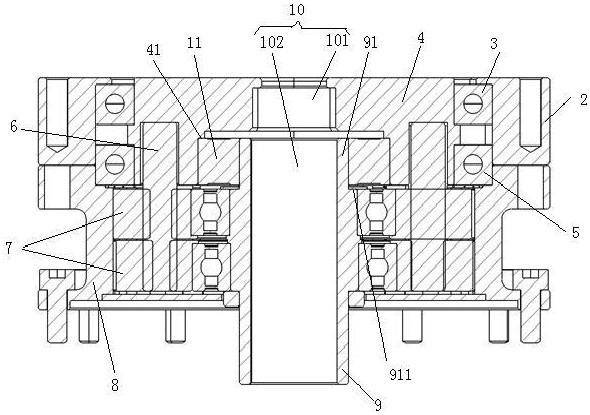
3、第一方面,本实用新型的实施例提供一种中孔摆线针减速机构,其包括偏心轴、摆线针减速结构和输出法兰,所述偏心轴通过摆线针减速结构带动输出法兰转动,使输出法兰的转速小于偏心轴的转速;
4、其中,所述中孔摆线针减速机构沿偏心轴的轴向方向具有贯穿两端的中通孔,且中通孔贯穿所述输出法兰和偏心轴。
5、在一些实施方式中,所述中通孔包括位于输出法兰上的第一孔段和位于偏心轴上的第二孔段;
6、其中,所述输出法兰的一端可转动地套设在所述偏心轴上,且第一孔段与第二孔段相对,以使第一孔段与第二孔段连通。
7、在一些实施方式中,所述输出法兰、第一孔段和第二孔段三者的中心线与偏心轴的轴线均重合。
8、在一些实施方式中,所述偏心轴的一端设有颈缩段,所述输出法兰的一端设有凹槽,所述第一孔段贯穿凹槽的底面;
9、其中,所述凹槽内套设有轴承,所述输出法兰通过所述轴承套设在所述偏心轴的颈缩段上。
10、在一些实施方式中,所述摆线针减速结构包括滚针座、第一摆线齿轮、第二摆线齿轮和轴销;所述滚针座具有内孔,所述内孔沿周向具有依次排布的多个滚针;
11、所述偏心轴沿轴向依次间隔设有第一偏心部和第二偏心部,所述第一摆线齿轮套设在第一偏心部上,所述第二摆线齿轮套设在第二偏心部上;所述第一摆线齿轮和第二摆线齿轮两者沿周向均设有多个依次间隔排布的限位孔,所述轴销固定在输出法兰上,所述轴销的数量与第一摆线齿轮上限位孔的数量和第二摆线齿轮上限位孔的数量均相等,各轴销用于一一对应地插入第一摆线齿轮上的限位孔和第二摆线齿轮上的限位孔;
12、其中,输出法兰和偏心轴均可相对滚针座转动,所述偏心轴用于带动第一摆线齿轮和第二摆线齿轮运动,第一摆线齿轮和第二摆线齿轮两者通过各轴销带动输出法兰转动,所述第一摆线齿轮和第二摆线齿轮两者用于与滚针座内的滚针配合,使输出法兰的转速小于偏心轴的转速。
13、在一些实施方式中,所述第一摆线齿轮和第二摆线齿轮两者的硬度是轴销硬度的60%至75%。
14、第二方面,本实用新型的实施例还提供一种机器人,其可以包括机械臂和上述任一种的中孔摆线针减速机构;所述中孔摆线针减速机构的输出法兰用于与机械臂连接,以带动机械臂转动。
15、借由上述技术方案,本实用新型中孔摆线针减速机构和机器人至少具有以下有益效果:
16、根据本实用新型的技术方案,当本实用新型的中孔摆线针减速机构与驱动对象比如机械臂连接时,驱动对象上的线缆可以从中通孔走线,从而可以对驱动对象上的线缆进行理顺,防止驱动对象运动的过程中线缆发生缠绕。
17、上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种中孔摆线针减速机构,其特征在于,包括偏心轴(9)、摆线针减速结构和输出法兰(4),所述偏心轴(9)通过摆线针减速结构带动输出法兰(4)转动,使输出法兰(4)的转速小于偏心轴(9)的转速;
2.如权利要求1所述的中孔摆线针减速机构,其特征在于,
3.如权利要求2所述的中孔摆线针减速机构,其特征在于,
4.如权利要求2所述的中孔摆线针减速机构,其特征在于,
5.如权利要求1至4中任一项所述的中孔摆线针减速机构,其特征在于,
6.如权利要求5所述的中孔摆线针减速机构,其特征在于,
7.一种机器人,其特征在于,包括机械臂和权利要求1至6中任一项所述的中孔摆线针减速机构;
技术总结
本技术涉及协作机器人、工业机器人、服务机器人技术领域,更具体地说,它涉及一种中孔摆线针减速机构和机器人,其中,中孔摆线针减速机构包括偏心轴、摆线针减速结构和输出法兰,所述偏心轴通过摆线针减速结构带动输出法兰转动,使输出法兰的转速小于偏心轴的转速;所述中空摆线针减速机构沿偏心轴的轴向方向具有贯穿两端的中通孔,使中通孔贯穿所述输出法兰和偏心轴。根据本技术的技术方案,当本技术的中孔摆线针减速机构与驱动对象比如机械臂连接时,驱动对象上的线缆可以从中通孔走线,从而可以对驱动对象上的线缆进行理顺,防止驱动对象运动的过程中线缆发生缠绕。
技术研发人员:王华青,王建,黄波华,张庆鑫,吕会星,黄嘉诚
受保护的技术使用者:广东西格传动智能科技有限公司
技术研发日:20231219
技术公布日:2024/7/23
- 还没有人留言评论。精彩留言会获得点赞!