一种管道巡检机器人及机器人控制方法与流程
本发明涉及管道检测的,尤其涉及一种管道巡检机器人及机器人控制方法。
背景技术:
1、管道巡检机器人,是一种用于管道内部检查和维护的关键工具,在现代社会中发挥着重要作用,特别是在管道检测和维护方面。它们通常被用于各种行业,包括石油和天然气、水处理和化工等领域,通过携带各种传感器、摄像头和其他设备,能够在管道内部进行全面的检查,以检测和识别各种问题。
2、相关技术中,管道巡检机器人的四周通常可变径设置有爬行机构,在应用中,爬行机构可以调节自身位置以适配不同管径的管道,并具备一定的跃障能力。然而,面对较复杂的管道环境,例如复杂的障碍或管道路径,上述的管道巡检机器人在适用上明显不足。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出了一种管道巡检机器人及机器人控制方法,提高管道巡检机器人的适用性。
2、第一方面,本申请实施例提供了一种管道巡检机器人,包括:
3、机身主体;
4、多个爬行机构,依次布置于所述机身主体的周向方向上,其中,各个所述爬行机构包括:
5、转动臂,所述转动臂的一端与所述机身主体转动连接,且其转动轴与所述机身主体的长度方向垂直设置;
6、驱动组件,设置于所述机身主体,用于驱动所述转动臂转动;
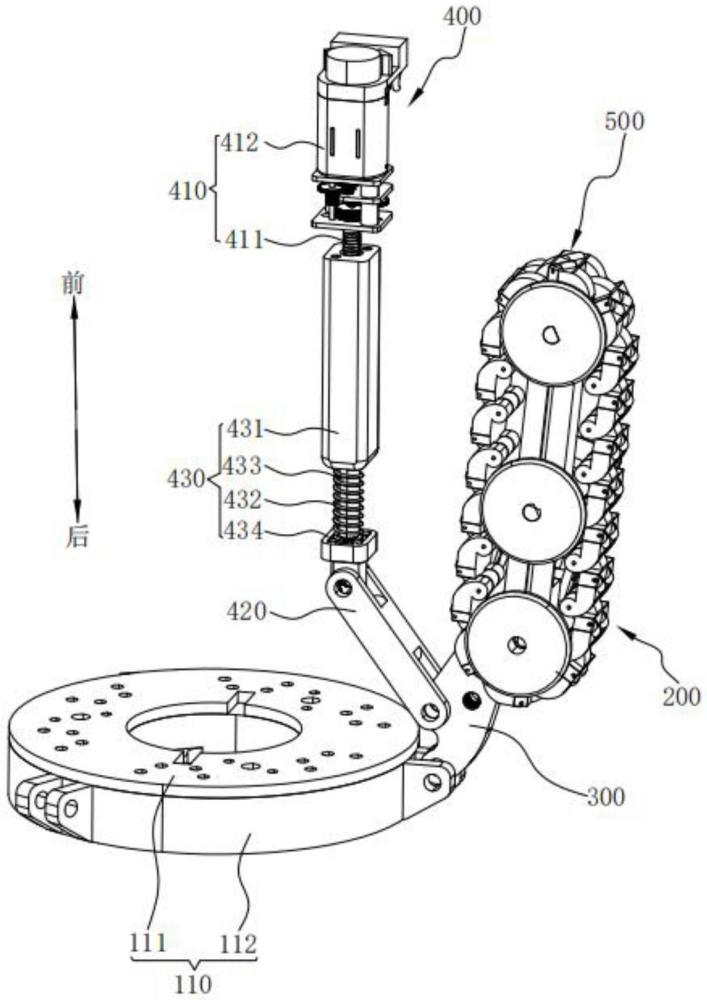
7、履带爬行组件,包括传动轴、第一驱动件、履带臂、弹性件、主动履带轮、从动履带轮与同步履带,其中,所述传动轴转动设置于所述转动臂,所述第一驱动件设置于所述转动臂,用于驱动所述传动轴转动,所述履带臂转动设置于所述传动轴,所述弹性件与所述履带臂相连接,用于保持所述履带臂的位置,所述主动履带轮与所述传动轴相连接,所述从动履带轮与所述履带臂转动连接,所述同步履带绕设于所述主动履带轮与所述从动履带轮上,所述转动臂的转动轴与所述传动轴平行设置。
8、根据本发明的一些实施例,各个所述履带爬行组件包括两个履带臂,所述弹性件为扭簧,所述扭簧的一弹性臂与一个所述履带臂的内侧相连接,所述扭簧的另一弹性臂与另一个所述履带臂的内侧相连接,所述扭簧用于使两个所述履带臂同直线设置。
9、根据本发明的一些实施例,一个所述履带臂的一端具有圆弧槽,另一个所述履带臂的一端具有圆弧凸起,所述圆弧凸台转动设置于所述弧形槽;
10、所述扭簧至少设置有两个,一个所述扭簧的两个弹性臂与两个所述履带臂的同一侧壁相抵持,另一个所述扭簧的两个弹性臂与两个所述履带臂的同一侧壁相抵持,且两个所述扭簧的弹性臂分别抵持于所述履带臂内侧的对侧位置。
11、根据本发明的一些实施例,所述履带的表面转动设置有导向滚轮,所述导向滚轮的转轴相对于所述履带的运动方向倾斜设置。
12、根据本发明的一些实施例,所述机身主体包括:
13、两个端头座,所述端头座用于可拆卸装载执行机构,所述转动臂与所述端头座转动连接;
14、滑轨固定架,所述滑轨固定架的两端分别与所述端头座相连接,所述滑轨固定架沿其长度方向开设有导轨槽;
15、其中,所述驱动组件包括第二驱动件、传动连杆与传动座,其中,所述传动座滑动设置于所述导轨槽,所述第二驱动件设置于所述导轨槽内,用于驱动所述传动座沿所述导轨槽滑动,所述传动连杆的一端与所述传动座转动连接,另一端与所述转动臂转动连接。
16、根据本发明的一些实施例,在所述机身主体的周向方向,所述爬行机构的转动臂交错地与两个所述端头座转动连接;或,所述爬行机构的转动臂与同一个所述端头座转动连接。
17、根据本发明的一些实施例,所述管道巡检机器人包括两组爬行机构,其中,一组爬行机构包括多个所述爬行机构,并分布于所述机身主体的四周,各个所述爬行机构的转动臂与一个所述端头座转动连接;另一组爬行机构包括多个所述爬行机构,并分布于所述机身主体的四周,各个所述爬行机构的转动臂与另一个所述端头座转动连接,且两组所述爬行机构在所述机身主体的长度方向错开设置。
18、根据本发明的一些实施例,所述端头座:
19、法兰盘,所述滑轨固定架的端部与所述法兰盘相连接;
20、装载盘,所述转动臂与所述装载盘转动连接,且所述装载盘用于可拆卸装载执行机构。
21、第二方面,本申请实施例提供了一种机器人控制方法,应用于上述的管道巡检机器人,包括:
22、获取管道的障碍和/或裂缝的位置信息以及特征信息;
23、获取所述管道巡检机器人的加速度以及角度变化;
24、基于所述位置信息、所述特征信息、所述加速度以及所述角度变化规划出规避策略,所述规避策略用于控制所述管道巡检机器人以规避管道的障碍和/或裂缝。
25、根据本发明的一些实施例,所述获取管道的障碍和/或裂缝的位置信息以及特征信息,包括:
26、获取所述管道巡检机器人对管道的监测信息,所述监测信息包括雷达相机以及rgb相机捕获的信息;或,所述监测信息包括深度相机以及rgb相机捕获的信息;或,所述监测信息包括两个rgb相机捕获的信息;
27、获取预先训练好的目标机器人学习模型,所述目标机器人学习模型由管道环境的数据集训练初始机器人学习模型获取的;
28、将所述监测信息输入所述目标机器人学习模型,以获取所述目标机器人学习模型的输出结果,所述输出结果用于表征管道的障碍和/或裂缝的位置信息以及特征信息。
29、从以上技术方案可以看出,本申请实施例具有以下优点:驱动组件驱动转动臂沿机身主体的径向方向向外转动,相应地,履带爬行组件伴随转动臂朝向远离机身主体的方向运动,以适配不同管径的管道。其中,在具体适配不同管径管道的过程中,驱动组件通过转动臂驱动同步履带靠近从动履带轮的部分首先抵持在管道的内壁上,驱动组件通过转动臂继续驱动转动臂朝向管道内壁的方向运动,履带臂克服弹性件的弹力,绕传动轴转动,由此,履带臂以从动履带轮为支点逐渐靠拢管道的内壁,从而使同步履带逐渐完全压合于管道的内侧,履带爬行组件在驱动组件的作用下灵活地适配管道的各种环境。
技术特征:
1.一种管道巡检机器人,其特征在于,包括:
2.根据权利要求1所述的一种管道巡检机器人,其特征在于,各个所述履带爬行组件包括两个履带臂,所述弹性件为套设于所述传动轴的扭簧,所述扭簧的一弹性臂与一个所述履带臂相连接,所述扭簧的另一弹性臂与另一个所述履带臂相连接,所述扭簧用于使两个所述履带臂同直线设置。
3.根据权利要求2所述的一种管道巡检机器人,其特征在于,一个所述履带臂的一端具有圆弧槽,另一个所述履带臂的一端具有圆弧凸起,所述圆弧凸台转动设置于所述弧形槽;
4.根据权利要求3所述的一种管道巡检机器人,其特征在于,所述履带的表面转动设置有导向滚轮,所述导向滚轮的转轴相对于所述履带的运动方向倾斜设置。
5.根据权利要求1所述的一种管道巡检机器人,其特征在于,所述机身主体包括:
6.根据权利要求5所述的一种管道巡检机器人,其特征在于,在所述机身主体的周向方向,所述爬行机构的转动臂交错地与两个所述端头座转动连接;或,所述爬行机构的转动臂与同一个所述端头座转动连接。
7.根据权利要求5所述的一种管道巡检机器人,其特征在于,所述管道巡检机器人包括两组爬行机构,其中,一组爬行机构包括多个所述爬行机构,并分布于所述机身主体的四周,各个所述爬行机构的转动臂与一个所述端头座转动连接;另一组爬行机构包括多个所述爬行机构,并分布于所述机身主体的四周,各个所述爬行机构的转动臂与另一个所述端头座转动连接,且两组所述爬行机构在所述机身主体的长度方向错开设置。
8.根据权利要求5至7中任意一项所述的一种管道巡检机器人,其特征在于,所述端头座:
9.一种机器人控制方法,其特征在于,应用于权利要求1至8中任意一项所述的管道巡检机器人,包括:
10.根据权利要求9所述的一种机器人控制方法,其特征在于,所述获取管道的障碍和/或裂缝的位置信息以及特征信息,包括:
技术总结
本发明公开一种管道巡检机器人及机器人控制方法,包括机身主体以及设置于其四周的多个爬行机构,其中,爬行机构包括转动臂、驱动组件与履带爬行组件,其中,转动臂与机身主体转动连接,驱动组件用于驱动转动臂转动;履带爬行组件包括传动轴、第一驱动件、履带臂、弹性件、主动履带轮、从动履带轮与同步履带,其中,传动轴转动设置于转动臂,第一驱动件用于驱动传动轴转动,履带臂转动设置于传动轴,弹性件与履带臂相连接,主动履带轮与传动轴相连接,从动履带轮与履带臂转动连接,同步履带绕设于主动履带轮与从动履带轮。驱动组件通过转动臂驱动履带爬行组件适配不同内径的管道时,转动臂克服弹性件以自适应转动,同步履带压合于管道的内壁。
技术研发人员:陈勇全,王健霖,彭丽宁,高源,郑文丽,赵妍
受保护的技术使用者:深圳市人工智能与机器人研究院
技术研发日:
技术公布日:2024/11/7
- 还没有人留言评论。精彩留言会获得点赞!