一种化工工业管道的检测机器人
本发明涉及检测机器人,具体为一种化工工业管道的检测机器人。
背景技术:
1、在化工行业中,管道作为一种高效的物料输送手段而得到广泛的应用。为提高管道的使用寿命、防止泄漏等事故的发生,就必须对管道进行定期的检测维护,由于人工检测成本高,周期长,甚至检测人员风险高,因此经常使用检测机器人来实现管道的自动检测,降低人工检测的作业成本,提高检测的效率。
2、现有的检测机器人主要通过在行走机构上搭载温度传感器、摄像头、红外相机等传感器对管道进行检测,例如,在公开号为cn117601144a,公开日期2024年2月27日的专利中公开了一种在管道上行走,通过红外相机检测管道缺陷的检测机器人。
3、但是现有的检测机器人不具有对管道内液体采样的能力,对管道内液体采样是检测维护的重要环节,通过对样品的分析能够实现对产品质量和安全的控制。
4、现有的管道内液体采样工作主要是通过采样阀和采样瓶配合实现,采样阀的进口连接到管道,采样阀的出口上固定有采样针,采样瓶上安装有胶塞,采样时推动采样瓶挤压采样针,使采样针刺破采样瓶胶塞,再远程控制采样阀打开,收集样品,由于工人需要到多个位置采样,存在工人徒步距离长,携带和保存采样瓶不方便等缺点。
5、因此需要设计一种具有自动采样和保存功能的检测机器人。
技术实现思路
1、本发明的目的在于提供一种化工工业管道的检测机器人,以解决上述背景技术中提出的问题。
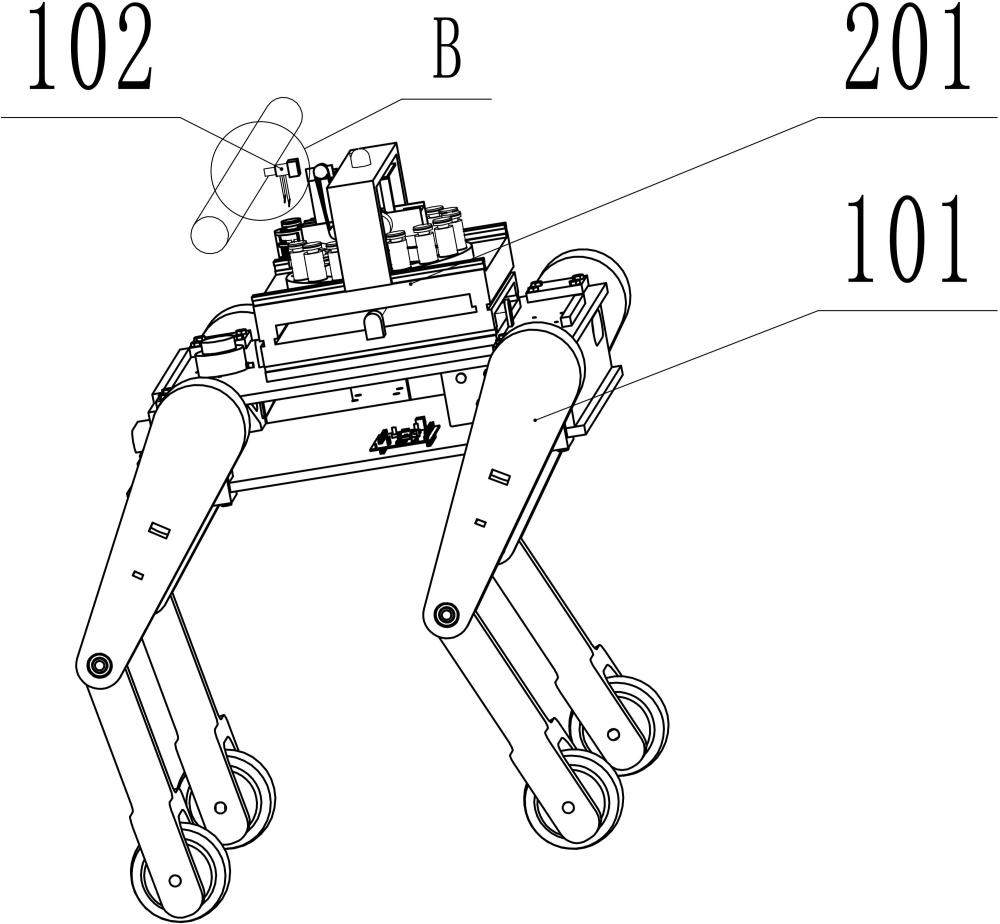
2、为实现上述目的,本发明提供如下技术方案:一种化工工业管道的检测机器人,行走机构上设置有采样组件,采样组件包括所述底座和转盘,底座上固定有通信模块和控制模块,通信模块与采样阀通信连接,通信模块与控制模块电性连接,通信模块与行走机构通信连接;
3、底座上转动的设置有所述转盘,转盘上开设有多个凹槽,凹槽内设置有采样瓶,底座上固定有龙门架,龙门架上升降的设置有采样臂,采样臂前端设置有夹爪组件,夹爪组件能够夹紧采样瓶,采样臂上设置有支撑组件;
4、龙门架上固定有摄像头,摄像头电性连接到控制模块;
5、支撑组件包括支撑板和铰链座,所述铰链座固定在采样臂前端,铰链座上的a点铰接有a支撑连杆的一端,a支撑连杆的另一端铰接在所述支撑板上的b点,支撑板上的c点铰接有b支撑连杆的一端,b支撑连杆的另一端铰接在采样臂上的d点,abcd四点围成一个平行四边形,支撑板能够由采样瓶侧面运动到采样瓶下方。
6、优选的,夹爪组件包括平台、弹性夹和内锥套,所述平台升降的设置在采样臂上,平台前端固定有弹性夹,弹性夹自由状态时张开,平台前端固定有c形架,c形架内滑动的设置有内锥套,内锥套内设置有内锥面,内锥面向底座的方向收窄,内锥套向上滑动能够带动弹性夹合拢,采样臂前端固定有台阶,台阶下表面能够接触转盘上表面,台阶上表面能够接触内锥套下表面。
7、优选的,采样臂上固定有支架,平台滑动的设置在支架上,采样臂上转动的设置有丝杠,平台螺纹连接到丝杠,丝杠由a传动机构驱动,a传动机构设置在采样臂上,a传动机构由a从动轮驱动,a从动轮转动的设置在采样臂上,a从动轮由主动轮组驱动,主动轮组设置的设置在采样臂上;
8、a从动轮是齿轮和内凹圆弧块的双层结构,主动轮组包括a不完全齿轮、主轴和a外凸圆弧块,所述主轴转动的设置在采样臂上,主轴上固定有所述a不完全齿轮和所述a外凸圆弧块,a不完全齿轮能够和a从动轮的齿轮啮合,a不完全齿轮和a从动轮的齿轮脱离啮合时,a外凸圆弧块与a从动轮的内凹圆弧块接触,阻止a从动轮转动。
9、优选的,a传动机构包括输出锥齿轮411、同步带和a输出齿轮,丝杠上同轴固定有所述输出锥齿轮411,输出锥齿轮411啮合有输入锥齿轮,输入锥齿轮转动的设置在支架上,输入锥齿轮同轴固定有输出同步带轮,输出同步带轮通过所述同步带连接到输入同步带轮,输入同步带轮转动的设置在采样臂上,输入同步带轮同轴固定有所述a输出齿轮,a输出齿轮啮合有a中间齿轮,a中间齿轮啮合到a从动轮。
10、优选的,主轴由驱动电机驱动,驱动电机电性连接到控制模块,驱动电机固定在采样臂上。
11、优选的,龙门架下固定有升降齿条,采样臂滑动的设置在立柱上,立柱固定在底座上,升降齿条上啮合有升降齿轮,升降齿轮转动的设置在采样臂上,升降齿轮由b传动机构驱动,b传动机构设置在采样臂上,b传动机构由b从动轮驱动,b从动轮转动的设置在采样臂上,b从动轮由主动轮组驱动;
12、b从动轮是齿轮和内凹圆弧块的双层结构,主动轮组还包括b不完全齿轮和b外凸圆弧块,主轴上固定有所述b不完全齿轮和所述b外凸圆弧块,b不完全齿轮能够和b从动轮的齿轮啮合,b不完全齿轮和b从动轮的齿轮脱离啮合时,b外凸圆弧块与b从动轮的内凹圆弧块接触,阻止b从动轮转动。
13、优选的,b传动机构包括b输出齿轮和b中间齿轮,升降齿轮同轴固定有所述b输出齿轮,b输出齿轮啮合有所述b中间齿轮,b中间齿轮同轴固定有b从动轮。
14、优选的,采样臂上滑动的设置有支撑齿条,支撑齿条上端能够和龙门架接触,支撑齿条通过传动齿轮组连接到b支撑连杆,传动齿轮组设置在采样臂上,传动齿轮组的首轮啮合到支撑齿条,传动齿轮组的末轮同轴固定在b支撑连杆上,b支撑连杆上固定有扭簧的一端,扭簧的另一端固定在采样臂上,扭簧能够保持支撑板处在采样臂下方。
15、优选的,转盘内固定有内齿圈,内齿圈啮合有回转齿轮,回转齿轮固定在回转电机上,回转电机固定在底座上,回转电机电性连接到控制模块。
16、优选的,支架上固定有深度相机,深度相机电性连接到控制模块,底座下固定有二维工作滑台,二维工作滑台电性连接到控制模块。
17、与现有技术相比,本发明的有益效果是:行走机构上设置有采样组件,采样组件包括底座、转盘、夹爪组件和支撑组件,转盘能够存放多个采样瓶,通过夹爪组件先下降夹取采样瓶随后支撑组件支撑采样瓶底部,采样臂上升带动夹爪组件上升进而带动采样瓶上升,进而使采样针刺破采样瓶,控制模块通过通信模块远程控制采样阀开关,进行采样,采样完成后采样臂下降,支撑组件先返回,随后夹爪组件松开采样瓶并上升,夹爪组件上升后,转盘转过一个采样瓶,为下一次采样做准备,采样组件各部分相互配合实现管道内液体采样工作,解决了现有检测机器人不能进行管道内采样,仍需工人到多个位置采样,工人徒步距离长,携带和保存采样瓶不方便等问题。
18、由于采样瓶设置在凹槽内,采样瓶在行走机构的移动中更加稳定,不容易磕碰,支撑板能够由采样瓶侧面运动到采样瓶下方,使支撑组件结构更加紧凑,在刺破采样瓶的胶塞时,支撑板能够防止采样瓶脱落,龙门架上固定有摄像头,能够对管道进行检测。
技术特征:
1.一种化工工业管道的检测机器人,其特征在于:行走机构(101)上设置有采样组件,采样组件包括底座(201)和转盘(301),所述底座(201)上固定有通信模块和控制模块,通信模块与采样阀(102)通信连接,通信模块与控制模块电性连接,通信模块与行走机构(101)通信连接;
2.根据权利要求1所述的一种化工工业管道的检测机器人,其特征在于:夹爪组件(400)包括平台(401)、弹性夹(402)和内锥套(403),所述平台(401)升降的设置在采样臂(203)上,平台(401)前端固定有弹性夹(402),弹性夹(402)自由状态时张开,平台(401)前端固定有c形架(404),c形架(404)内滑动的设置有内锥套(403),内锥套(403)内设置有内锥面,内锥面向底座(201)的方向收窄,内锥套(403)向上滑动能够带动弹性夹(402)合拢,采样臂(203)前端固定有台阶(205),台阶(205)下表面能够接触转盘(301)上表面,台阶(205)上表面能够接触内锥套(403)下表面。
3.根据权利要求2所述的一种化工工业管道的检测机器人,其特征在于:采样臂(203)上固定有支架(206),平台(401)滑动的设置在支架(206)上,采样臂(203)上转动的设置有丝杠(207),平台(401)螺纹连接到丝杠(207),丝杠(207)由a传动机构(410)驱动,a传动机构(410)设置在采样臂(203)上,a传动机构(410)由a从动轮(208)驱动,a从动轮(208)转动的设置在采样臂(203)上,a从动轮(208)由主动轮组(220)驱动,主动轮组(220)设置设置在采样臂(203)上;
4.根据权利要求3所述的一种化工工业管道的检测机器人,其特征在于:a传动机构(410)包括输出锥齿轮(411)、同步带(413)和a输出齿轮(414),丝杠(207)上同轴固定有所述输出锥齿轮(411),输出锥齿轮(411)啮合有输入锥齿轮(412),输入锥齿轮(412)转动的设置在支架(206)上,输入锥齿轮(412)同轴固定有输出同步带轮,输出同步带轮通过所述同步带(413)连接到输入同步带轮,输入同步带轮转动的设置在采样臂(203)上,输入同步带轮同轴固定有所述a输出齿轮(414),a输出齿轮(414)啮合有a中间齿轮(415),a中间齿轮(415)啮合到a从动轮(208)。
5.根据权利要求4所述的一种化工工业管道的检测机器人,其特征在于:主轴(221)由驱动电机(224)驱动,驱动电机(224)电性连接到控制模块,驱动电机(224)固定在采样臂(203)上。
6.根据权利要求3所述的一种化工工业管道的检测机器人,其特征在于:龙门架(202)下固定有升降齿条(209),采样臂(203)滑动的设置在立柱(211)上,立柱(211)固定在底座(201)上,升降齿条(209)上啮合有升降齿轮(210),升降齿轮(210)转动的设置在采样臂(203)上,升降齿轮(210)由b传动机构(230)驱动,b传动机构(230)设置在采样臂(203)上,b传动机构(230)由b从动轮(212)驱动,b从动轮(212)转动的设置在采样臂(203)上,b从动轮(212)由主动轮组(220)驱动;
7.根据权利要求6所述的一种化工工业管道的检测机器人,其特征在于:b传动机构(230)包括b输出齿轮(231)和b中间齿轮(232),升降齿轮(210)同轴固定有所述b输出齿轮(231),b输出齿轮(231)啮合有所述b中间齿轮(232),b中间齿轮(232)同轴固定有b从动轮(212)。
8.根据权利要求1所述的一种化工工业管道的检测机器人,其特征在于:采样臂(203)上滑动的设置有支撑齿条(505),支撑齿条(505)上端能够和龙门架(202)接触,支撑齿条(505)通过传动齿轮组(510)连接到b支撑连杆(504),传动齿轮组(510)设置在采样臂(203)上,传动齿轮组(510)的首轮啮合到支撑齿条(505),传动齿轮组(510)的末轮同轴固定在b支撑连杆(504)上,b支撑连杆(504)上固定有扭簧的一端,扭簧的另一端固定在采样臂(203)上,扭簧能够保持支撑板(501)处在采样臂(203)下方。
9.根据权利要求1所述的一种化工工业管道的检测机器人,其特征在于:转盘(301)内固定有内齿圈(304),内齿圈(304)啮合有回转齿轮(305),回转齿轮(305)固定在回转电机上,回转电机固定在底座(201)上,回转电机电性连接到控制模块。
10.根据权利要求3所述的一种化工工业管道的检测机器人,其特征在于:支架(206)上固定有深度相机(213),深度相机(213)电性连接到控制模块,底座(201)下固定有二维工作滑台(214),二维工作滑台(214)电性连接到控制模块。
技术总结
本发明公开了一种化工工业管道的检测机器人,行走机构上设置有采样组件,采样组件包括底座、转盘、夹爪组件和支撑组件,转盘能够存放多个采样瓶,通过夹爪组件先下降夹取采样瓶随后支撑组件支撑采样瓶底部,采样臂上升带动夹爪组件上升进而带动采样瓶上升,进而使采样针刺破采样瓶,控制模块通过通信模块远程控制采样阀开关,进行采样,采样完成后采样臂下降,支撑组件先返回,随后夹爪组件松开采样瓶并上升,夹爪组件上升后,转盘转过一个采样瓶,为下一次采样做准备,采样组件各部分相互配合实现管道内液体采样工作,解决了现有检测机器人不能进行管道内采样,仍需工人到多个位置采样,工人徒步距离长,携带和保存采样瓶不方便等问题。
技术研发人员:王利利,马洪武,魏士博,张志伟
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!