一种底盘式管道机器人的制作方法
本申请涉及管道机器人,具体而言,涉及一种底盘式管道机器人。
背景技术:
1、对于地下排水排污管道,为了方便检测管道内部的损伤程度及损伤位置,通常采用管道机器人来进行检测,比较常用的管道机器人包括底盘式管道机器人和支撑式管道机器人,其中,底盘式管道机器人通过移动底盘在管道底部移动,支撑式管道机器人通过至少三组沿周向设置的支撑轮机构支撑在管道内壁上,从而在管道中轴线上移动。
2、实际应用中,地下排水排污管道内部有时候会存在积水或淤泥,对于支撑式管道机器人来说,只需要调整周向角度使支撑轮机构不与积水或淤泥接触,即可避免积水或淤泥阻碍管道机器人运动;由于底盘式管道机器人是在管道底部移动的,且一般的底盘式管道机器人的结构尺寸是无法在线调整的,所以难以避免受到积水或淤泥阻碍,因此,对于底盘式管道机器人来说,如何避免受到积水或淤泥阻碍是有待解决的技术问题,需要研究一种底盘式管道机器人,能够在线调节管道机器人的高度,以避开管道中的积水或淤泥。
3、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本申请的目的在于提供一种底盘式管道机器人,能够在线调节底盘式管道机器人的高度,以避开管道中的积水或淤泥。
2、本申请提供了一种底盘式管道机器人,包括:3d相机、控制器、机器人底盘、第一驱动装置和至少两组变径轮;
3、每组所述变径轮包括两个分别设置在所述机器人底盘的宽度方向两侧的车轮,各组所述变径轮沿所述机器人底盘的长度方向排布,所述第一驱动装置用于驱动所有所述车轮转动以带动管道机器人移动;
4、每个所述车轮均设置有一气管组件,所述气管组件用于与设置在所述机器人底盘上的第一气泵装置连接,所述第一气泵装置用于向所述车轮进行充气或抽气以使所述车轮的轮径增大或减小;
5、每组所述变径轮的两个所述车轮之间的轮距能够在线调节;
6、所述3d相机设置在所述机器人底盘上,所述3d相机用于拍摄管道内部图像;
7、所述控制器设置在所述机器人底盘上,所述控制器用于根据所述管道内部图像识别确定所述车轮的目标轮径和每组所述变径轮的两个所述车轮之间的目标轮距,并根据所述目标轮径和所述目标轮距调节所述车轮的轮径和所述轮距。
8、通过上述设置,能够在线调节底盘式管道机器人的高度,以避开管道中的积水或淤泥。
9、可选地,所述车轮包括:轮毂、弹性包裹层和多个气囊;
10、多个所述气囊沿所述轮毂的周向均匀间隔设置,且多个所述气囊位于所述轮毂与所述弹性包裹层之间,每个所述气囊均与所述气管组件连接,所述弹性包裹层用于包裹所有所述气囊以形成所述车轮的连续周面,所述弹性包裹层能够发生弹性形变以适应所有所述气囊的增大或减小。
11、通过上述设置,可以根据实际需要调节车轮的轮径大小。
12、可选地,每个所述车轮通过一伸缩杆与所述机器人底盘连接,所述伸缩杆用于调节所述车轮与所述机器人底盘之间的距离。
13、可选地,所述第一气泵装置的出口位于所述机器人底盘的侧面靠近所述车轮的一侧,所述车轮上的所述气管组件的入口用于在所述车轮靠近所述机器人底盘时与所述第一气泵装置的出口对准连接。
14、通过上述设置,能够方便快捷实现对车轮进行充气或抽气。
15、可选地,所述伸缩杆包括第一滑筒部、第一滑杆部和活塞,所述活塞滑动设置在所述第一滑筒部的内腔中,所述第一滑杆部的第一端与所述活塞固定连接,第二端伸出所述第一滑筒部并与所述车轮连接;
16、所述第一滑筒部与所述机器人底盘转动连接,且所述第一滑筒部远离所述车轮的一端与一固定部旋转连接,所述固定部与所述第一滑筒部的后端面围成一通气腔,所述第一滑筒部的后端面上开设有连通所述通气腔和所述第一滑筒部的内腔的第三通气口,所述固定部上设置有连通所述通气腔的第一通气口,所述第一通气口与所述机器人底盘上的第二气泵装置连接;所述固定部上还设置有与所述第一滑筒部同轴的第二通气口,所述第二通气口的第一端与所述第一气泵装置连接;
17、所述第一滑杆部沿轴向设置有输气通道,所述第一滑筒部的内腔中设置有第一柔性气管,所述第一柔性气管的第一端与所述第二通气口的第二端转动连接,所述第一柔性气管的第二端与所述活塞固定连接,并通过开设在所述活塞中心的连接孔与所述输气通道连通,所述输气通道与所述气管组件连通。
18、可选地,所述伸缩杆包括同轴设置的第二滑筒部、第二滑杆部和丝杆,所述丝杆转动设置在所述第二滑筒部内且一端伸出所述第二滑筒部,所述第二滑杆部滑动设置在所述第二滑筒部内且一端伸出第二滑筒部;所述丝杆和所述第二滑杆部均沿轴向设置有贯通两端的轴孔,所述第二滑杆部的轴孔内壁设置有内螺纹,并通过所述内螺纹与所述丝杆螺纹连接;所述第二滑筒部与所述机器人底盘转动连接;
19、所述车轮上同轴设置有一个具有内腔的连接筒,并通过所述连接筒与所述第二滑杆部伸出所述第二滑筒部的一端连接,所述气管组件包括一气嘴,所述气嘴设置在所述连接筒的内腔中;
20、所述丝杆和所述第二滑杆部的轴孔中穿设有一根第二柔性气管,所述第二柔性气管的一端伸出所述丝杆并与所述第一气泵装置连接,另一端伸入所述连接筒的内腔并与所述气嘴连接。
21、可选地,每个所述气囊通过一基座固定在所述轮毂上。
22、可选地,所述基座上设置有两个挡板,两个所述挡板设置在所述气囊的两侧并分别位于所述轮毂的两侧边沿。
23、可选地,所述基座上设置有杯罩,所述杯罩围绕所述气囊周向的部分位置。
24、可选地,所述气囊的形状为椭圆形,所述气囊的长轴直径指向所述轮毂。
25、有益效果:本申请提供的一种底盘式管道机器人,通过设置3d相机和控制器,控制器根据3d相机拍摄的管道内部图像确定车轮的目标轮径和每组变径轮的两个车轮之间的目标轮距,从而根据目标轮径和目标轮距控制第一驱动装置和第一气泵装置调节车轮的轮径和轮距,以调节底盘式管道机器人的高度,从而能够有效避开管道中的积水或淤泥。
技术特征:
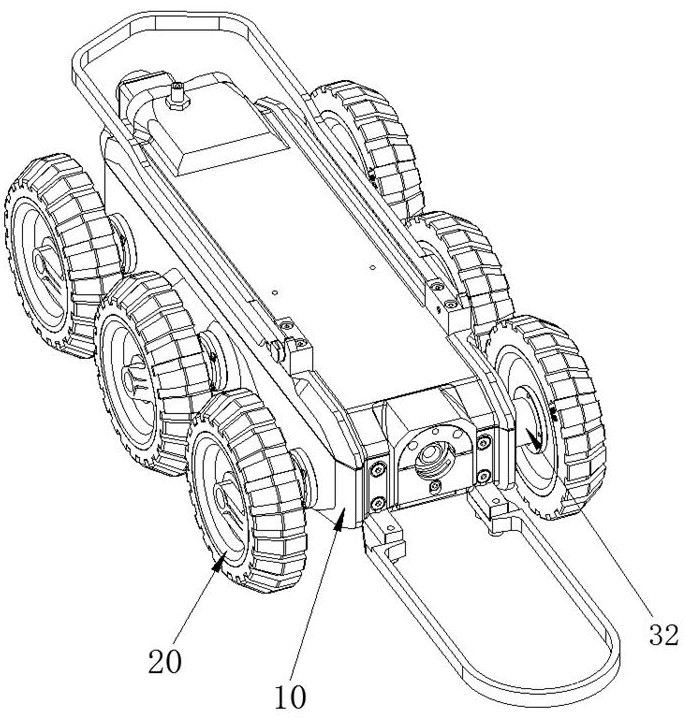
1.一种底盘式管道机器人,其特征在于,包括:3d相机、控制器、机器人底盘(10)、第一驱动装置和至少两组变径轮;
2.根据权利要求1所述的底盘式管道机器人,其特征在于,所述车轮(20)包括:轮毂(21)、弹性包裹层(22)和多个气囊(23);
3.根据权利要求1所述的底盘式管道机器人,其特征在于,每个所述车轮(20)通过一伸缩杆(32)与所述机器人底盘(10)连接,所述伸缩杆(32)用于调节所述车轮(20)与所述机器人底盘(10)之间的距离。
4.根据权利要求3所述的底盘式管道机器人,其特征在于,所述第一气泵装置(11)的出口位于所述机器人底盘(10)的侧面靠近所述车轮(20)的一侧,所述车轮(20)上的所述气管组件(24)的入口用于在所述车轮(20)靠近所述机器人底盘(10)时与所述第一气泵装置(11)的出口对准连接。
5.根据权利要求3所述的底盘式管道机器人,其特征在于,所述伸缩杆(32)包括第一滑筒部(3201)、第一滑杆部(3202)和活塞(3203),所述活塞(3203)滑动设置在所述第一滑筒部(3201)的内腔中,所述第一滑杆部(3202)的第一端与所述活塞(3203)固定连接,第二端伸出所述第一滑筒部(3201)并与所述车轮(20)连接;
6.根据权利要求3所述的底盘式管道机器人,其特征在于,所述伸缩杆(32)包括同轴设置的第二滑筒部(3209)、第二滑杆部(3210)和丝杆(3211),所述丝杆(3211)转动设置在所述第二滑筒部(3209)内且一端伸出所述第二滑筒部(3209),所述第二滑杆部(3210)滑动设置在所述第二滑筒部(3209)内且一端伸出第二滑筒部(3209);所述丝杆(3211)和所述第二滑杆部(3210)均沿轴向设置有贯通两端的轴孔,所述第二滑杆部(3210)的轴孔内壁设置有内螺纹,并通过所述内螺纹与所述丝杆(3211)螺纹连接;所述第二滑筒部(3209)与所述机器人底盘(10)转动连接;
7.根据权利要求2所述的底盘式管道机器人,其特征在于,每个所述气囊(23)通过一基座(37)固定在所述轮毂(21)上。
8.根据权利要求7所述的底盘式管道机器人,其特征在于,所述基座(37)上设置有两个挡板,两个所述挡板设置在所述气囊(23)的两侧并分别位于所述轮毂(21)的两侧边沿。
9.根据权利要求7所述的底盘式管道机器人,其特征在于,所述基座(37)上设置有杯罩(38),所述杯罩(38)围绕所述气囊(23)周向的部分位置。
10.根据权利要求2所述的底盘式管道机器人,其特征在于,所述气囊(23)的形状为椭圆形,所述气囊(23)的长轴直径指向所述轮毂(21)。
技术总结
本申请涉及管道机器人技术领域,具体而言,涉及一种底盘式管道机器人,通过设置3D相机和控制器,控制器根据3D相机拍摄的管道内部图像确定车轮的目标轮径和每组变径轮的两个车轮之间的目标轮距,从而根据目标轮径和目标论距控制第一驱动装置和第一气泵装置调节车轮的轮径和轮距,以调节底盘式管道机器人的高度,从而能够有效避开管道中的积水或淤泥。
技术研发人员:梁瑞权,何浩,陈建生,邓超河
受保护的技术使用者:广东广宇科技发展有限公司
技术研发日:
技术公布日:2024/11/11
- 还没有人留言评论。精彩留言会获得点赞!