一种人形机器人用行星减速电机的制作方法
本发明涉及电机,具体涉及一种人形机器人用行星减速电机。
背景技术:
1、随着自动化技术和人工智能的发展,工业关节机器人和人形机器人在多个领域得到了广泛应用。行星减速电机由于其结构紧凑、减速比大以及传动效率高等优点,在工业关节机器人中被广泛采用。这类电机通过行星齿轮机构实现减速和增扭,能够有效地驱动机器人关节臂执行精确而复杂的运动。
2、在工业关节机器人中,行星减速电机通常面对的是较为稳定的重负载工况,因此其设计和应用相对简单。然而,在人形机器人领域,情况则复杂得多。人形机器人不仅需要模仿人类的动作,还需要在不同的负载状态下工作,包括轻负载下的高速旋转和重负载下的稳定运行。这种多变且复杂的负载状态对减速电机提出了更高的要求,现有的固定减速比行星减速电机难以满足这些需求。
3、具体而言,目前技术中存在的主要问题包括:
4、固定减速比限制:传统的行星减速电机通过行星齿轮机构的串联来实现减速和增扭,一旦电机设计制造完成,其减速比是固定的,不能根据实际需求进行调节。这使得电机在不同负载条件下的性能表现受限。
5、适应性差:在人形机器人中,动作的多样性和复杂性要求电机能够在多种负载条件下高效工作。固定减速比的行星减速电机无法灵活应对这些变化,从而影响了机器人的整体性能。
6、动态响应不足:在快速变换负载的情况下,固定减速比的行星减速电机可能无法提供足够的动态响应能力,导致动作不流畅或不稳定。
7、能效问题:在某些负载条件下,固定减速比可能导致电机工作效率降低,增加了能耗并缩短了电池寿命。
技术实现思路
1、本发明的目的是针对现有技术中的上述不足,提供了一种人形机器人用行星减速电机。
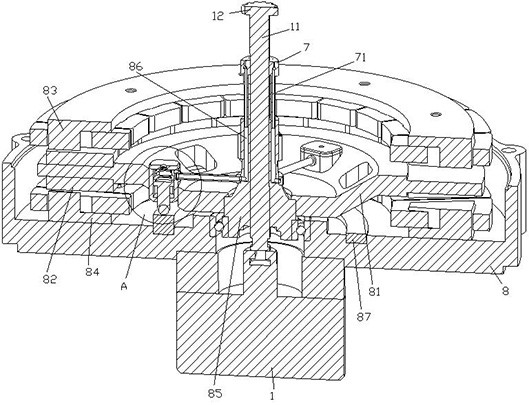
2、本发明的目的通过以下技术方案实现:一种人形机器人用行星减速电机,包括推杆、电机、第一行星减速机以及第二行星减速机;电机设有输入轴;
3、第一行星减速机包括第一太阳齿以及转动套设于第一太阳齿外的第一行星架;第二行星减速机包括第二太阳齿以及转动套设于第二太阳齿外的第二行星架;第一太阳齿与输入轴连接;第二太阳齿与第一行星架转动连接;
4、推杆的输出端设有控制杆;控制杆与输入轴型面连接;控制杆、第一太阳齿、第一行星架、第二太阳齿以及第二行星架之间设有锁止组件。
5、本发明进一步设置为,所述第一行星减速机包括设于电机的第一行星壳、设于第一行星壳的第一外齿圈以及转动设于第一行星架的第一行星齿;所述第一行星齿啮合设于第一外齿圈与第一太阳齿之间;所述第一太阳齿转动设于第一行星架的中部;所述第一行星齿转动设于第一行星架的圆周面;所述第一行星架转动设于第一行星壳。
6、本发明进一步设置为,所述第二行星减速机包括设于第一行星壳的第二行星壳、设于第二行星壳的第二外齿圈以及转动设于第二行星架的第二行星齿;所述第二行星齿啮合设于第二外齿圈与第二太阳齿之间;所述第二太阳齿转动设于第二行星架的中部;所述第二行星齿转动设于第二行星架的圆周面;所述第二行星架转动设于第二行星壳。
7、本发明进一步设置为,所述控制杆的端部设有花键齿;所述第二太阳齿内设有与花键齿配合的第一花键轮;所述第二行星架内设有与花键齿配合的第二花键轮。
8、本发明进一步设置为,所述锁止组件包括锁止架、传动架以及压环;所述传动架设于第一行星架内;所述第二太阳齿贯穿设有通道;所述锁止架升降活动设于通道;所述传动架设于通道的底部;所述锁止架与通道的顶部之间设有锁止弹簧;所述压环设于推杆;所述压环与锁止架的底部抵靠;所述锁止架与第二太阳齿型面连接;
9、所述锁止架设有锁止销;所述传动架设有与锁止销配合的锁止槽。
10、本发明进一步设置为,所述电机包括外壳以及转动设于外壳内的动子架;所述输入轴设于动子架的中部;所述动子架的外周设有磁铁;所述外壳在磁铁的顶部设有上定子架;所述外壳在磁铁的顶部设有下定子架;所述上定子架与下定子架均绕设有线圈。
11、本发明进一步设置为,所述输入轴设有气道;所述压环的顶部设有气孔;所述压环的底部设有密封管;所述密封管活动伸缩设于气道;所述气孔通过密封管与气道连通;
12、所述电机内设有用于给气道提供气体的压气组件。
13、本发明进一步设置为,所述压气组件包括本体、设于本体的压气腔、活动伸缩设于压气腔的活塞、设于活塞与压气腔之间的压气弹簧以及设于输入轴的连接环;
14、所述连接环与本体之间设有连接管;所述压气腔通过连接管与气道连通;所述本体设有与压气腔连通的进气口;所述进气口设有朝压气腔内开启的第一阀片;所述压气腔与连接管之间设有朝连接管方向开启的第二阀片。
15、本发明进一步设置为,所述外壳内设有凸轮;所述活塞伸出压气腔后设有球轮;所述球轮活动设于凸轮上。
16、本发明的有益效果:本发明控制杆能够通过锁止组件使得第一太阳齿、第一行星架、第二太阳齿以及第二行星架之间实现传动或者分离,从而使得人形机器人用行星减速电机能够调节输出不同的减速比。
技术特征:
1.一种人形机器人用行星减速电机,其特征在于:包括推杆、电机、第一行星减速机以及第二行星减速机;电机设有输入轴;
2.根据权利要求1所述的一种人形机器人用行星减速电机,其特征在于:所述第一行星减速机包括设于电机的第一行星壳、设于第一行星壳的第一外齿圈以及转动设于第一行星架的第一行星齿;所述第一行星齿啮合设于第一外齿圈与第一太阳齿之间;所述第一太阳齿转动设于第一行星架的中部;所述第一行星齿转动设于第一行星架的圆周面;所述第一行星架转动设于第一行星壳。
3.根据权利要求2所述的一种人形机器人用行星减速电机,其特征在于:所述第二行星减速机包括设于第一行星壳的第二行星壳、设于第二行星壳的第二外齿圈以及转动设于第二行星架的第二行星齿;所述第二行星齿啮合设于第二外齿圈与第二太阳齿之间;所述第二太阳齿转动设于第二行星架的中部;所述第二行星齿转动设于第二行星架的圆周面;所述第二行星架转动设于第二行星壳。
4.根据权利要求1所述的一种人形机器人用行星减速电机,其特征在于:所述控制杆的端部设有花键齿;所述第二太阳齿内设有与花键齿配合的第一花键轮;所述第二行星架内设有与花键齿配合的第二花键轮。
5.根据权利要求1所述的一种人形机器人用行星减速电机,其特征在于:所述电机包括外壳以及转动设于外壳内的动子架;所述输入轴设于动子架的中部;所述动子架的外周设有磁铁;所述外壳在磁铁的顶部设有上定子架;所述外壳在磁铁的顶部设有下定子架;所述上定子架与下定子架均绕设有线圈。
6.根据权利要求5所述的一种人形机器人用行星减速电机,其特征在于:所述输入轴设有气道;所述压环的顶部设有气孔;所述压环的底部设有密封管;所述密封管活动伸缩设于气道;所述气孔通过密封管与气道连通;
7.根据权利要求6所述的一种人形机器人用行星减速电机,其特征在于:所述压气组件包括本体、设于本体的压气腔、活动伸缩设于压气腔的活塞、设于活塞与压气腔之间的压气弹簧以及设于输入轴的连接环;
8.根据权利要求7所述的一种人形机器人用行星减速电机,其特征在于:所述外壳内设有凸轮;所述活塞伸出压气腔后设有球轮;所述球轮活动设于凸轮上。
技术总结
本发明涉及电机技术领域,具体涉及一种人形机器人用行星减速电机,包括推杆、电机、第一行星减速机以及第二行星减速机;电机设有输入轴;第一行星减速机包括第一太阳齿以及转动套设于第一太阳齿外的第一行星架;第二行星减速机包括第二太阳齿以及转动套设于第二太阳齿外的第二行星架;第一太阳齿与输入轴连接;第二太阳齿与第一行星架转动连接;推杆设有控制杆;控制杆与输入轴型面连接;控制杆、第一太阳齿、第一行星架、第二太阳齿以及第二行星架之间设有锁止组件。本发明控制杆能够通过锁止组件使得第一太阳齿、第一行星架、第二太阳齿以及第二行星架之间实现传动或者分离,从而使得人形机器人用行星减速电机能够调节输出不同的减速比。
技术研发人员:彭新飞,彭彪
受保护的技术使用者:东莞普莱特传动设备有限公司
技术研发日:
技术公布日:2024/12/17
- 还没有人留言评论。精彩留言会获得点赞!