载具及电磁阀的控制方法、系统与流程
本公开涉及智能驾驶,尤其涉及一种载具及电磁阀的控制方法、系统。
背景技术:
1、电磁阀在电动汽车中有广泛应用,例如汽车的底盘的集成线控制动系统以及减震器等,电磁阀的控制效果对电动汽车的性能有重要影响。
2、随着对于电动汽车的驾驶体验感的提高,对于电磁阀的控制精度、响应速度等也提出了更高的要求。由于电磁阀涉及电子、电磁、机械和液压等多个种技术的集成,使得电磁阀在使用过程中容易产生迟滞效应,影响电磁阀的响应效果。
技术实现思路
1、为了解决现有技术中电磁阀容易产生迟滞效应影响响应效果的问题,本发明提供了一种载具及电磁阀的控制方法、系统。
2、第一方面,本公开实施例一种电磁阀的控制方法,控制方法包括:
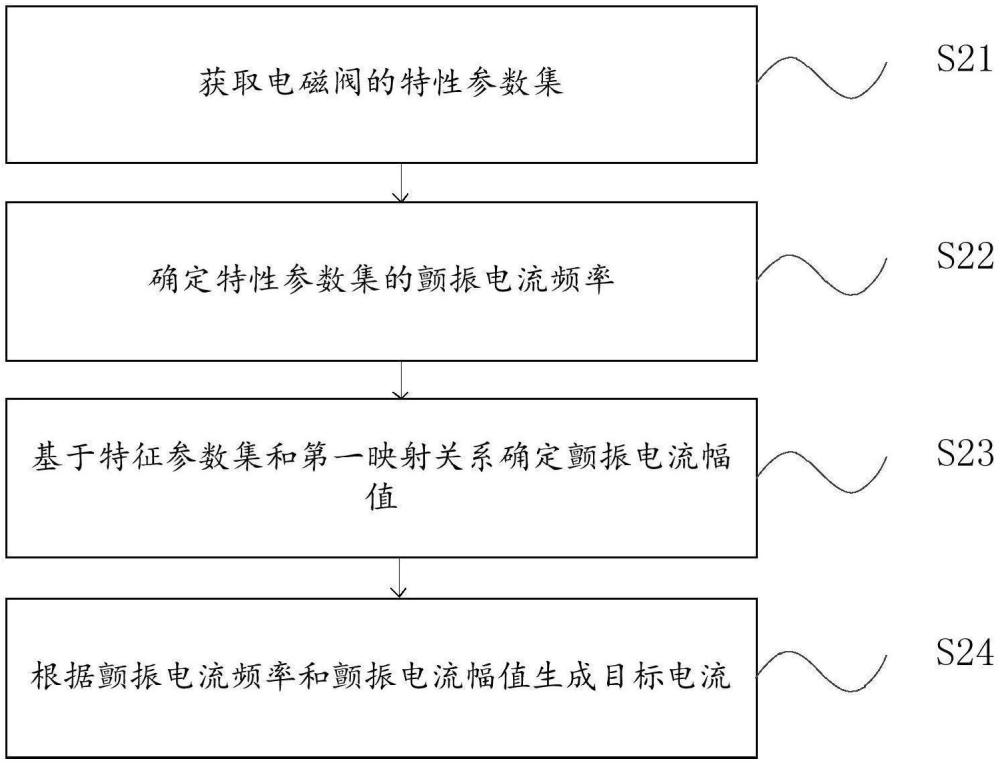
3、获取电磁阀的特性参数集;特性参数集中每个维度的特征参数根据对影响电磁阀响应的参素进行分析确定;
4、确定特性参数集的颤振电流频率;
5、基于特征参数集和第一映射关系,确定颤振电流幅值;第一映射关系表征特征参数集和颤振电流幅值之间的映射关系;
6、根据颤振电流频率和颤振电流幅值生成目标电流,目标电流用于对电磁阀进行控制。
7、在一个实施例中,根据颤振电流频率和颤振电流幅值生成目标电流之前,还包括:
8、基于特征参数集和第二映射关系,确定平均电流;第二映射关系表征特征参数集和平均电流之间的映射关系;
9、根据颤振电流频率和颤振电流幅值生成目标电流,包括:
10、根据颤振电流频率和颤振电流幅值生成颤振电流;
11、对平均电流和颤振电流进行累加,得到目标电流。
12、在一个实施例中,特征参数集包括电磁阀阀芯的目标位移和位移幅度;
13、位移幅度根据目标位移和第三映射关系确定,第三映射关系表征目标位移和位移幅度的映射关系。
14、在一个实施例中,第一映射关系包括特征参数集中的位移幅度和目标位移,与颤振电流幅值之间的映射关系;
15、基于特征参数集和第一映射关系,确定颤振电流幅值,包括:
16、基于特征参数集的位移幅度、目标位移和第一映射关系,确定颤振电流幅值。
17、在一个实施例中,特征参数集还包括电磁阀的温度以及电磁阀阀口两端的压力差。
18、在一个实施例中,第一映射关系根据特征参数集对颤振电流幅值进行拟合确定;
19、和/或,第一映射关系根据电磁阀的动态特性确定。
20、在一个实施例中,目标电流通过生成目标脉宽调制电流对电磁阀的控制,目标脉宽调制电流和目标电流一一对应,目标脉宽调制电流加载于电磁阀的线圈绕组上。
21、在一个实施例中,目标脉宽调制电流的占空比根据电磁阀的温度设置。
22、第二方面,本公开实施例提供一种电磁阀的控制系统,控制系统包括:
23、获取模块,用于获取电磁阀的特性参数集;特性参数集中每个维度的特征参数,分别根据对电磁阀的响应进行影响因素分析确定;
24、第一确定模块,用于确定特征参数集的颤振电流频率;
25、第二确定模块,用于基于特征参数集和第一映射关系,确定颤振电流幅值;第一映射关系表征特征参数集和颤振电流幅值之间的映射关系;
26、生成模块,用于根据颤振电流频率和颤振电流幅值生成目标电流,目标电流用于对电磁阀进行控制。
27、在一个实施例中,执行生成模块84之前,系统还包括:
28、第三确定模块,用于基于特征参数集和第二映射关系,确定平均电流;第二映射关系表征特征参数集和平均电流之间的映射关系;
29、生成模块包括:
30、生成单元,用于根据颤振电流频率和颤振电流幅值生成颤振电流;
31、累加单元,用于对平均电流和颤振电流进行累加,得到目标电流。
32、在一个实施例中,特征参数集包括电磁阀阀芯的目标位移和位移幅度;位移幅度根据目标位移和第三映射关系确定,第三映射关系表征目标位移和位移幅度的映射关系。
33、在一个实施例中,第一映射关系包括特征参数集中的位移幅度和目标位移,与颤振电流幅值之间的映射关系;
34、第二确定模块还用于基于特征参数集的位移幅度、目标位移和第一映射关系,确定颤振电流幅值。
35、在一个实施例中,特征参数集还包括电磁阀的温度以及电磁阀阀口两端的压力差。
36、在一个实施例中,第一映射关系根据特征参数集对颤振电流幅值进行拟合确定;
37、和/或,第一映射关系根据电磁阀的动态特性确定。
38、在一个实施例中,目标电流通过生成目标脉宽调制电流对电磁阀的控制,目标脉宽调制电流和目标电流一一对应,目标脉宽调制电流加载于电磁阀的线圈绕组上。
39、在一个实施例中,目标脉宽调制电流的占空比根据电磁阀的温度设置。
40、第三方面,本公开实施例提供一种载具,其特征在于,载具包括处理器和存储器,存储器中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现如第一方面中任一项的电磁阀的控制方法。
41、本公开实施例提供的载具及电磁阀的控制方法、系统,具有如下技术效果:
42、在对电磁阀进行控制以消除电磁阀的迟滞效应之前,会先获取电磁阀的特征参数集,特征参数集中包括至少一个维度的特征参数,根据特征参数集生成目标电流对电磁阀进行控制,能够有效地消除不同的因素对电磁阀的阀芯的干扰,以提升对于电磁阀的阀芯控制的准确性,消除电磁阀的迟滞效应,进而提升电磁阀的动态响应速度和控制精度。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种电磁阀的控制方法,其特征在于,所述控制方法包括:
2.如权利要求1所述的电磁阀的控制方法,其特征在于,所述根据所述颤振电流频率和所述颤振电流幅值生成目标电流之前,还包括:
3.如权利要求1所述的电磁阀的控制方法,其特征在于,所述特征参数集包括所述电磁阀阀芯的目标位移和位移幅度;
4.如权利要求3所述的控制方法,其特征在于,所述第一映射关系包括所述特征参数集中的位移幅度和目标位移,与所述颤振电流幅值之间的映射关系;
5.如权利要求1所述的电磁阀的控制方法,其特征在于,所述特征参数集还包括电磁阀的温度以及电磁阀阀口两端的压力差。
6.如权利要求1所述的电磁阀的控制方法,其特征在于,所述第一映射关系根据所述特征参数集对所述颤振电流幅值进行拟合确定;
7.如权利要求1所述的控制方法,其特征在于,所述目标电流通过生成目标脉宽调制电流对电磁阀的控制,所述目标脉宽调制电流和所述目标电流一一对应,所述目标脉宽调制电流加载于所述电磁阀的线圈绕组上。
8.如权利要求6所述的控制方法,其特征在于,所述目标脉宽调制电流的占空比根据所述电磁阀的温度设置。
9.一种电磁阀的控制系统,其特征在于,所述控制系统包括:
10.一种载具,其特征在于,所述载具包括处理器和存储器,存储器中存储有至少一条指令、至少一段程序、代码集或指令集,至少一条指令、至少一段程序、代码集或指令集由处理器加载并执行以实现如权利要求1-8中任一项所述的电磁阀的控制方法。
技术总结
本公开提供了一种载具及电磁阀的控制方法、系统,控制方法包括:获取电磁阀的特性参数集;特性参数集中每个维度的特征参数根据对影响电磁阀响应的参素进行分析确定;确定特性参数集的颤振电流频率;基于特征参数集和第一映射关系,确定颤振电流幅值;第一映射关系表征特征参数集和颤振电流幅值之间的映射关系;根据颤振电流频率和颤振电流幅值生成目标电流,目标电流用于对电磁阀进行控制,提升对于电磁阀的阀芯控制的准确性,消除电磁阀的迟滞效应,进而提升电磁阀的动态响应速度和控制精度。
技术研发人员:于超
受保护的技术使用者:中汽创智科技有限公司
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!