一种电磁阀优化结构的制作方法
本技术涉及电磁阀,尤其涉及一种电磁阀优化结构。
背景技术:
1、电磁阀是用电磁控制的工业设备,是用来控制流体的自动化基础元件,属于执行器,并不限于液压、气动,不同的电磁阀在控制系统的不同位置发挥作用,电磁阀从原理上可分为三大类:直动式电磁阀、分步直动式电磁阀和先导式电磁阀。
2、现有技术中,现有的快换,在使用时均需要加上电磁阀控制快换的锁紧打开,但是在快换本体上均无电磁阀,需外接电磁阀使用,接电磁阀过程中会使用到许多气管接头及气管,且暴露在外,容易出现损坏,因此需要一种电磁阀优化结构来满足人们的需求。
技术实现思路
1、本实用新型的目的在于提供一种电磁阀优化结构,以解决上述背景技术中提出的现有的快换,在使用时均需要加上电磁阀控制快换的锁紧打开,但是在快换本体上均无电磁阀,需外接电磁阀使用,接电磁阀过程中会使用到许多气管接头及气管,且暴露在外,容易出现损坏的问题。
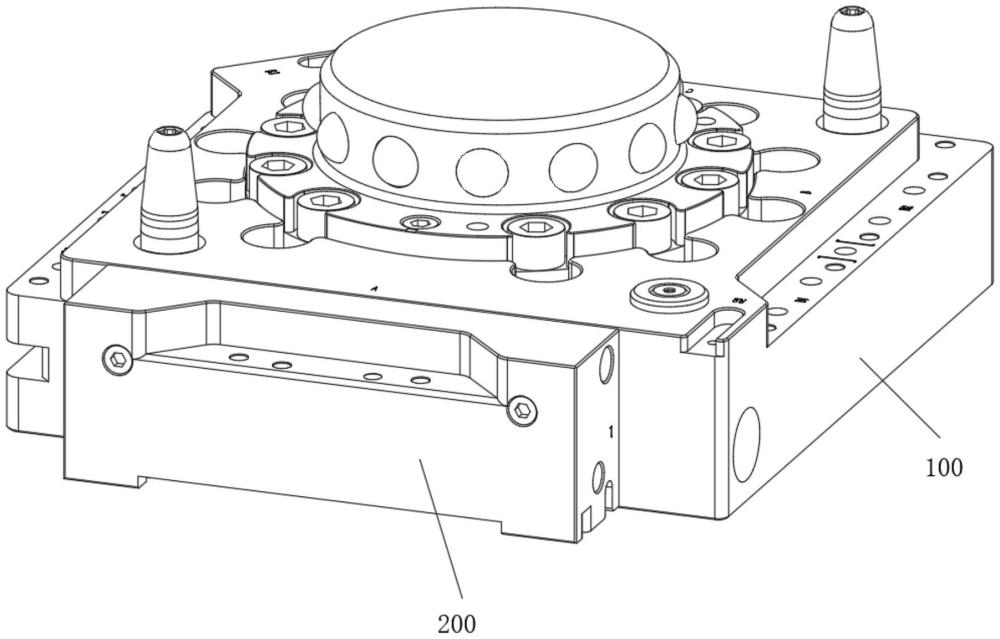
2、为实现上述目的,本实用新型提供如下技术方案:一种电磁阀优化结构,包括机器人工具快换装置,所述机器人工具快换装置的一侧活动安装有电磁阀壳体,机器人工具快换装置的两侧均固定安装有定位销,电磁阀壳体的两侧均螺纹安装有两个内六角圆柱头螺钉,内六角圆柱头螺钉的一端贯穿电磁阀壳体的内壁和机器人工具快换装置的内壁并延伸至机器人工具快换装置的内壁,电磁阀壳体的内部中活动安装有l型电磁阀芯,l型电磁阀芯的两侧均螺纹安装有十字槽盘头螺钉,十字槽盘头螺钉远离l型电磁阀芯的一端贯穿l型电磁阀芯的内壁和电磁阀壳体的内壁并延伸至电磁阀壳体的内壁。
3、优选的,所述电磁阀壳体和机器人工具快换装置两侧的内壁均开设有第一螺纹槽,第一螺纹槽的内部设有螺纹,内六角圆柱头螺钉与第一螺纹槽螺纹连接。
4、优选的,所述电磁阀壳体的内部开设有活动槽,活动槽与l型电磁阀芯相适配。
5、优选的,所述电磁阀壳体内壁的两侧均开设有定位槽,定位槽与定位销相适配,定位销的一端位于定位槽的内部。
6、优选的,所述l型电磁阀芯和电磁阀壳体内壁的两侧均开设有第二螺纹槽,第二螺纹槽的内部设有螺纹,十字槽盘头螺钉与第二螺纹槽螺纹连接。
7、优选的,所述电磁阀壳体上开设有第一气孔,机器人工具快换装置上开设有多个第二气孔,第二气孔与第一气孔相连通。
8、优选的,所述机器人工具快换装置负载小于等于350千克。
9、本实用新型的有益效果是:
10、本实用新型中,通过机器人工具快换装置、电磁阀壳体、l型电磁阀芯等结构的设置,优化了气路。不使用气管连接,将模块与快换的气路直接连通,连接处使用密封圈进行防漏气,代替外接电磁阀,减少工作时整体的体积,将气路连接方式改为内部连接,增加了可靠性,且减少了使用时出错的可能性。
技术特征:
1.一种电磁阀优化结构,包括机器人工具快换装置(100),其特征在于:所述机器人工具快换装置(100)的一侧活动安装有电磁阀壳体(200),机器人工具快换装置(100)的两侧均固定安装有定位销(201),电磁阀壳体(200)的两侧均螺纹安装有两个内六角圆柱头螺钉(203),内六角圆柱头螺钉(203)的一端贯穿电磁阀壳体(200)的内壁和机器人工具快换装置(100)的内壁并延伸至机器人工具快换装置(100)的内壁,电磁阀壳体(200)的内部中活动安装有l型电磁阀芯(300),l型电磁阀芯(300)的两侧均螺纹安装有十字槽盘头螺钉(302),十字槽盘头螺钉(302)远离l型电磁阀芯(300)的一端贯穿l型电磁阀芯(300)的内壁和电磁阀壳体(200)的内壁并延伸至电磁阀壳体(200)的内壁。
2.根据权利要求1所述的一种电磁阀优化结构,其特征在于:所述电磁阀壳体(200)和机器人工具快换装置(100)两侧的内壁均开设有第一螺纹槽(202),第一螺纹槽(202)的内部设有螺纹,内六角圆柱头螺钉(203)与第一螺纹槽(202)螺纹连接。
3.根据权利要求1所述的一种电磁阀优化结构,其特征在于:所述电磁阀壳体(200)的内部开设有活动槽(204),活动槽(204)与l型电磁阀芯(300)相适配。
4.根据权利要求1所述的一种电磁阀优化结构,其特征在于:所述电磁阀壳体(200)内壁的两侧均开设有定位槽(205),定位槽(205)与定位销(201)相适配,定位销(201)的一端位于定位槽(205)的内部。
5.根据权利要求1所述的一种电磁阀优化结构,其特征在于:所述l型电磁阀芯(300)和电磁阀壳体(200)内壁的两侧均开设有第二螺纹槽(301),第二螺纹槽(301)的内部设有螺纹,十字槽盘头螺钉(302)与第二螺纹槽(301)螺纹连接。
6.根据权利要求1所述的一种电磁阀优化结构,其特征在于:所述电磁阀壳体(200)上开设有第一气孔(303),机器人工具快换装置(100)上开设有多个第二气孔(400),第二气孔(400)与第一气孔(303)相连通。
7.根据权利要求1所述的一种电磁阀优化结构,其特征在于:所述机器人工具快换装置(100)负载小于等于350千克。
技术总结
本技术公开了一种电磁阀优化结构,涉及到电磁阀技术领域,包括机器人工具快换装置,机器人工具快换装置的一侧活动安装有电磁阀壳体,机器人工具快换装置的两侧均固定安装有定位销,电磁阀壳体的两侧均螺纹安装有两个内六角圆柱头螺钉,内六角圆柱头螺钉的一端贯穿电磁阀壳体的内壁和机器人工具快换装置的内壁并延伸至机器人工具快换装置的内壁。本技术中,通过机器人工具快换装置、电磁阀壳体、L型电磁阀芯等结构的设置,优化了气路。不使用气管连接,将模块与快换的气路直接连通,连接处使用密封圈进行防漏气,代替外接电磁阀,减少工作时整体的体积,将气路连接方式改为内部连接,增加了可靠性,且减少了使用时出错的可能性。
技术研发人员:李伟,杨亚超,许展豪,宁丹雷
受保护的技术使用者:北京拓博塔机器人技术有限公司
技术研发日:20240205
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!