一种用于市政排水管道的检测机器人的制作方法
本技术涉及管道检测机器人,尤其涉及一种用于市政排水管道的检测机器人。
背景技术:
1、传统的管道检测机器人对管道直径变化的适应性较小,通常一款管道检测机器人只能在特定直径的管道内运行。即使有能够对管径进行自适应的管道检测机器人,其对于管径的适应程度也有限制,并且成本高昂,因此对管道检测机器人而言这些缺点限制了其可以被应用的场合,而如今管道的使用率很高,用于不同场合的管道其管道直径也各不相同。
2、如公开号为cn214467054u公开了一种用于市政排水管道的检测机器人,包括机身、履带和视频摄像装置,所述机身为圆柱形结构,所述机身通过可转动的连接杆传动连接履带,所述视频摄像装置固定安装于机身的正前端,所述视频摄像装置包括固定柱、旋转柱、转动杆、转动头和摄像头组成且由后至前依次连接,所述固定柱与机身固定连接,固定柱的另一端转动连接旋转柱,所述旋转柱呈“u”形结构,所述旋转柱内设置第一转轴,并通过第一转轴转动连接转动杆,所述转动杆的另一端传动连接转动头,所述转动头与摄像头固定连接,本实用新型的有益效果:具有可自适应管径变化,越障能力强,负载能力强,具有可自适应管径变化,越障能力强。
3、但是现有技术中,常规的管道检测机器人只能够对管道内部进行检测,而管道内部情况较为复杂,未设置清障组件会导致管道检测机器人在行驶过程中受阻,影响管道的检测结果,从而导致装置的实用性受到一定程度的局限性。
技术实现思路
1、本实用新型的目的是为了解决管道内部情况较为复杂,未设置清障结构会导致管道检测机器人在行驶过程中受阻,影响管道的检测结果的问题。
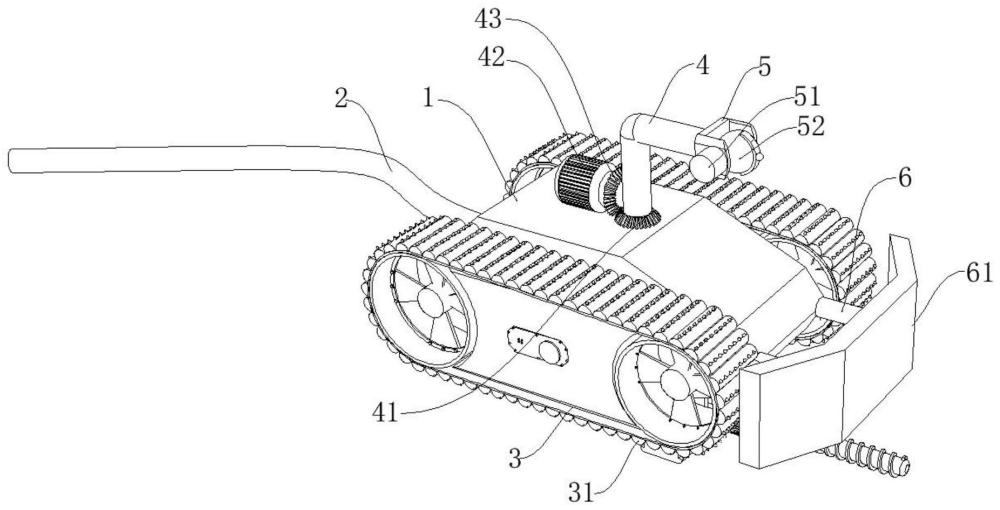
2、为了实现上述目的,本实用新型采用了如下技术方案:一种用于市政排水管道的检测机器人,包括主体,所述主体下表面的一侧固定连接有清障组件,所述清障组件包括连接架,所述连接架的外侧壁固定连接有转动电机b,所述转动电机b的输出轴转动连接有活动杆,所述活动杆的中部固定连接有旋转块,所述旋转块的一侧固定连接有粉碎电机,所述粉碎电机的输出轴转动连接有破碎钻头,所述主体下表面远离连接架的一侧固定连接有辅助组件,所述主体的一侧对称固定连接有固定杆,所述固定杆远离主体的一端固定连接有分流板,所述主体远离固定杆的一侧固定连接有线缆。
3、作为一种优选的实施方式,所述主体的移动端对称转动连接有履带,所述履带的表面固定连接有若干个等距排列的防滑块。
4、作为一种优选的实施方式,所述辅助组件包括限位电动推杆,所述限位电动推杆远离主体的一端固定连接有安装块,所述安装块的内腔活动连接有万向轮。
5、作为一种优选的实施方式,所述主体的上表面转动连接有l型杆,所述l型杆表面靠近主体的一侧固定连接有伞状齿轮a。
6、作为一种优选的实施方式,所述主体上表面靠近l型杆的一侧固定连接有伺服电机,所述伺服电机的输出轴转动连接有伞状齿轮b。
7、作为一种优选的实施方式,所述伞状齿轮b与伞状齿轮a相互啮合。
8、作为一种优选的实施方式,所述l型杆远离主体的一端固定连接有安装架,所述安装架的外侧壁固定连接有转动电机a。
9、作为一种优选的实施方式,所述转动电机a的输出轴传动连接有摄像监测装置,所述摄像监测装置的中部固定连接有转杆。
10、与现有技术相比,本实用新型的优点和积极效果在于,
11、1、本实用新型通过设置清障组件,对管道检测机器人的前进路线进行清理,启动转动电机b,转动电机b通过活动杆带动旋转块转动,旋转块带动粉碎电机、破碎钻头角度进行调整,粉碎电机的输出轴带动破碎钻头对管道内部的杂物进行破碎清理,同时在分流板的作用下,破碎的杂物会在分流板的作用下向管道检测机器人的两侧分离,从而有效清除管道检测机器人的行驶路线,提高了装置的检测结果。
12、2、本实用新型通过设置辅助组件,以便于提高了管道检测机器人在管道中的拐弯效果,市政排水管道错综复杂,管道检测机器人在拐弯时,限位电动推杆向下延伸带动安装块下移,使万向轮与管道的内底壁相抵,拐弯时,在辅助组件的作用下能够高效便捷地进行转弯,提高了装置的实用性。
技术特征:
1.一种用于市政排水管道的检测机器人,包括主体(1),其特征在于:所述主体(1)下表面的一侧固定连接有清障组件,所述清障组件包括连接架(8),所述连接架(8)的外侧壁固定连接有转动电机b(81),所述转动电机b(81)的输出轴转动连接有活动杆(82),所述活动杆(82)的中部固定连接有旋转块(83),所述旋转块(83)的一侧固定连接有粉碎电机(84),所述粉碎电机(84)的输出轴转动连接有破碎钻头(85),所述主体(1)下表面远离连接架(8)的一侧固定连接有辅助组件,所述主体(1)的一侧对称固定连接有固定杆(6),所述固定杆(6)远离主体(1)的一端固定连接有分流板(61),所述主体(1)远离固定杆(6)的一侧固定连接有线缆(2)。
2.根据权利要求1所述的一种用于市政排水管道的检测机器人,其特征在于:所述主体(1)的移动端对称转动连接有履带(3),所述履带(3)的表面固定连接有若干个等距排列的防滑块(31)。
3.根据权利要求1所述的一种用于市政排水管道的检测机器人,其特征在于:所述辅助组件包括限位电动推杆(7),所述限位电动推杆(7)远离主体(1)的一端固定连接有安装块(71),所述安装块(71)的内腔活动连接有万向轮(72)。
4.根据权利要求1所述的一种用于市政排水管道的检测机器人,其特征在于:所述主体(1)的上表面转动连接有l型杆(4),所述l型杆(4)表面靠近主体(1)的一侧固定连接有伞状齿轮a(41)。
5.根据权利要求1所述的一种用于市政排水管道的检测机器人,其特征在于:所述主体(1)上表面靠近l型杆(4)的一侧固定连接有伺服电机(42),所述伺服电机(42)的输出轴中转动连接有伞状齿轮b(43)。
6.根据权利要求5所述的一种用于市政排水管道的检测机器人,其特征在于:所述伞状齿轮b(43)与伞状齿轮a(41)相互啮合。
7.根据权利要求4所述的一种用于市政排水管道的检测机器人,其特征在于:所述l型杆(4)远离主体(1)的一端固定连接有安装架(5),所述安装架(5)的外侧壁固定连接有转动电机a(51)。
8.根据权利要求7所述的一种用于市政排水管道的检测机器人,其特征在于:所述转动电机a(51)的输出轴传动连接有摄像监测装置(53),所述摄像监测装置(53)的中部固定连接有转杆(52)。
技术总结
本实用涉及管道检测机器人技术领域,提供了一种用于市政排水管道的检测机器人,包括主体,主体下表面的一侧固定连接有清障组件,清障组件包括连接架,连接架的外侧壁固定连接有转动电机B,转动电机B的输出轴转动连接有活动杆,活动杆的中部固定连接有旋转块,本技术通过设置清障组件,对管道检测机器人的前进路线进行清理,启动转动电机B,转动电机B通过活动杆带动旋转块转动,旋转块带动粉碎电机、破碎钻头角度进行调整,粉碎电机的输出轴带动破碎钻头对管道内部的杂物进行破碎清理,同时在分流板的作用下,破碎的杂物会在分流板的作用下向管道检测机器人的两侧分离,从而有效清除管道检测机器人的行驶路线,提高了装置的检测结果。
技术研发人员:郑玉,上官嘉宝,高祥,殷汉洋,王成,王泽霖
受保护的技术使用者:西安西排水环境工程有限责任公司
技术研发日:20240416
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!