全自动装车鹤管的制作方法
本技术涉及流体装卸,尤其是一种全自动装车鹤管。
背景技术:
1、目前国内外在流体装卸行业都是通过装卸臂来进行整个装卸过程,装卸臂的操作必须要由人工去搬动它,臂的展开到法兰口的对接,装卸结束到臂的收回,都是通过人工去实现的,这种传统的人工装卸过程重复性较高,不仅费时费力加大了人工劳动强度,而且在一些危险介质装卸时难免突发情况,导致安全隐患造成人员伤亡,并且人工操作还需要一定的人工成本。
技术实现思路
1、本实用新型要解决的技术问题是:为了解决上述背景技术中存在的问题,提供一种改进的全自动装车鹤管,解决目前流体装卸行业使用的装卸臂需要人工操作搬运,费时费力,安全性差,成本高昂的问题。
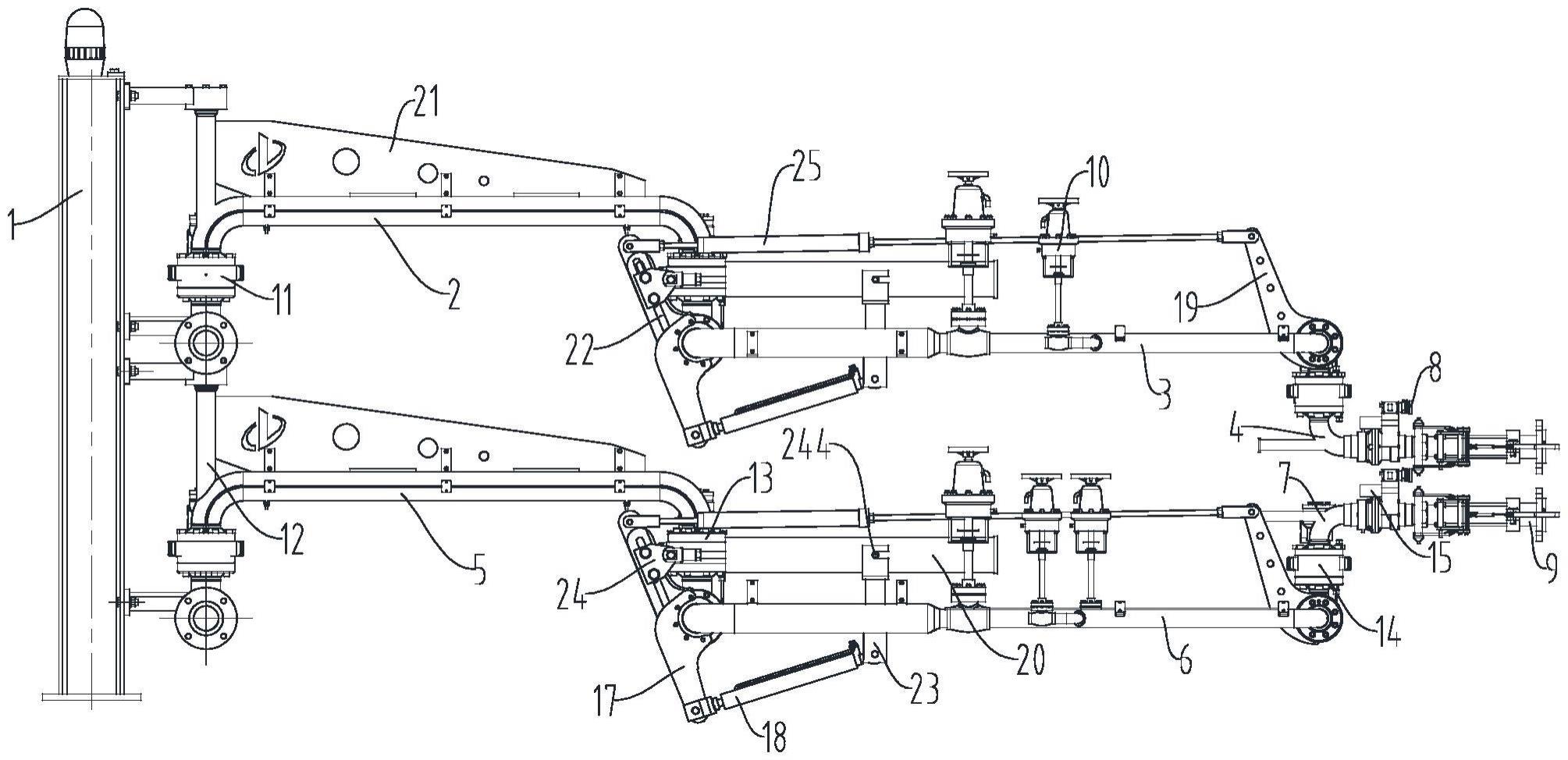
2、本实用新型解决其技术问题所采用的技术方案是:一种全自动装车鹤管,包括立柱、气相内臂、气相外臂、气相垂管、液相内臂、液相外臂、液相垂管、视觉相机、自动对接快速接头和自动阀门,所述的气相内臂和液相内臂均通过第一活动接头活动安装在立柱外侧的连接管上,所述气相外臂与气相内臂之间和液相外臂与液相内臂之间均通过第二活动接头相连接,所述气相垂管与气相外臂之间和液相垂管与液相外臂之间均通过第三活动接头相连接,所述视觉相机和自动对接快速接头均安装在气相垂管与液相垂管外侧,所述自动阀门固定安装在气相外臂和液相外臂外侧壁上,气相垂管与气相外臂外侧面上安装有用于控制视觉相机角度调节的第一液压马达,所述第二活动接头和第三活动接头外侧面上螺栓固定有用于控制横向翻转的第二液压马达,所述第二活动接头侧壁上通过可调式支架安装有用于控制纵向翻转的液压撑杆。
3、所述的第二活动接头和第三活动接头外侧面上均具有向上凸起的顶部调节支架。
4、所述第二活动接头的顶部调节支架上连接有用于提升翻转稳定性的弹簧钢平衡支架。
5、所述气相内臂和液相内臂上表面侧壁上均具有一体结构顶部加强筋。
6、所述顶部调节支架内部开设有斜置装配口,所述气相外臂和液相外臂侧壁上固定装配有连接控制支架,所述弹簧钢平衡支架一端通过装配座与斜置装配口螺栓固定,弹簧钢平衡支架另一端通过外侧面上的横向挤压杆插入连接控制支架与连接控制支架活动装配。
7、所述第二活动接头和第三活动接头的顶部调节支架之间活动装配有长度可调式联动丝杆。
8、本实用新型的有益效果是:
9、(1)本实用新型的全自动装车鹤管采用液压控制方式来对鹤管进行控制,无需人工操作,大大降低人工成本和安全隐患;
10、(2)通过安装在气相垂管与液相垂管外侧面上的视觉相机和自动对接快速接头,可以实现接头的精准定位,省时省力,连接装配更加高效。
技术特征:
1.一种全自动装车鹤管,包括立柱(1)、气相内臂(2)、气相外臂(3)、气相垂管(4)、液相内臂(5)、液相外臂(6)、液相垂管(7)、视觉相机(8)、自动对接快速接头(9)和自动阀门(10),其特征是:所述的气相内臂(2)和液相内臂(5)均通过第一活动接头(11)活动安装在立柱(1)外侧的连接管(12)上,所述气相外臂(3)与气相内臂(2)之间和液相外臂(6)与液相内臂(5)之间均通过第二活动接头(13)相连接,所述气相垂管(4)与气相外臂(3)之间和液相垂管(7)与液相外臂(6)之间均通过第三活动接头(14)相连接,所述视觉相机(8)和自动对接快速接头(9)均安装在气相垂管(4)与液相垂管(7)外侧,所述自动阀门(10)固定安装在气相外臂(3)和液相外臂(6)外侧壁上,气相垂管(4)与气相外臂(3)外侧面上安装有用于控制视觉相机(8)角度调节的第一液压马达(15),所述第二活动接头(13)和第三活动接头(14)外侧面上螺栓固定有用于控制横向翻转的第二液压马达(16),所述第二活动接头(13)侧壁上通过可调式支架(17)安装有用于控制纵向翻转的液压撑杆(18)。
2.根据权利要求1所述的全自动装车鹤管,其特征是:所述的第二活动接头(13)和第三活动接头(14)外侧面上均具有向上凸起的顶部调节支架(19)。
3.根据权利要求2所述的全自动装车鹤管,其特征是:所述第二活动接头的顶部调节支架(19)上连接有用于提升翻转稳定性的弹簧钢平衡支架(20)。
4.根据权利要求1所述的全自动装车鹤管,其特征是:所述气相内臂(2)和液相内臂(5)上表面侧壁上均具有一体结构顶部加强筋(21)。
5.根据权利要求3所述的全自动装车鹤管,其特征是:所述顶部调节支架(19)内部开设有斜置装配口(22),所述气相外臂(3)和液相外臂(6)侧壁上固定装配有连接控制支架(23),所述弹簧钢平衡支架(20)一端通过装配座(24)与斜置装配口(22)螺栓固定,弹簧钢平衡支架(20)另一端通过外侧面上的横向挤压杆(244)插入连接控制支架(23)与连接控制支架(23)活动装配。
6.根据权利要求3所述的全自动装车鹤管,其特征是:所述第二活动接头(13)和第三活动接头(14)的顶部调节支架之间活动装配有长度可调式联动丝杆(25)。
技术总结
本技术涉及流体装卸技术领域,尤其是一种全自动装车鹤管,包括立柱、气相内臂、气相外臂、气相垂管、液相内臂、液相外臂、液相垂管、视觉相机、自动对接快速接头和自动阀门。本技术的全自动装车鹤管采用液压控制方式来对鹤管进行控制,无需人工操作,大大降低人工成本和安全隐患;通过安装在气相垂管与液相垂管外侧面上的视觉相机和自动对接快速接头,可以实现接头的精准定位,省时省力,连接装配更加高效。
技术研发人员:冯是公,季惠贤,秦栋成
受保护的技术使用者:江苏长隆石化装备有限公司
技术研发日:20221216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!