一种旋盖机的制作方法
本技术涉及自动化领域,特别是一种旋盖机。
背景技术:
1、在自动化灌装领域中,需要将泵盖插入至瓶身中,再将泵盖与瓶身两者进行拧紧;常规的泵盖入料是通过单一抓手抓取泵盖,再将泵盖与瓶身进行拧紧,即在一个周期内只能实现一个泵盖、瓶身的拧紧;
2、如果设置多个抓手,则就需要多个泵盖能够保持一定的间距,不仅满足瓶身之间的间距需求,也能够内抓手抓取,但在泵盖入料过程中,往往是堆放在入口处,如何能够让多个泵盖间距入料成为了本领域研究人员急需解决的问题。
技术实现思路
1、本实用新型要解决的技术问题是:如何能够让多个泵盖间距入料;
2、为解决上述技术问题,本实用新型采取的技术方案为:
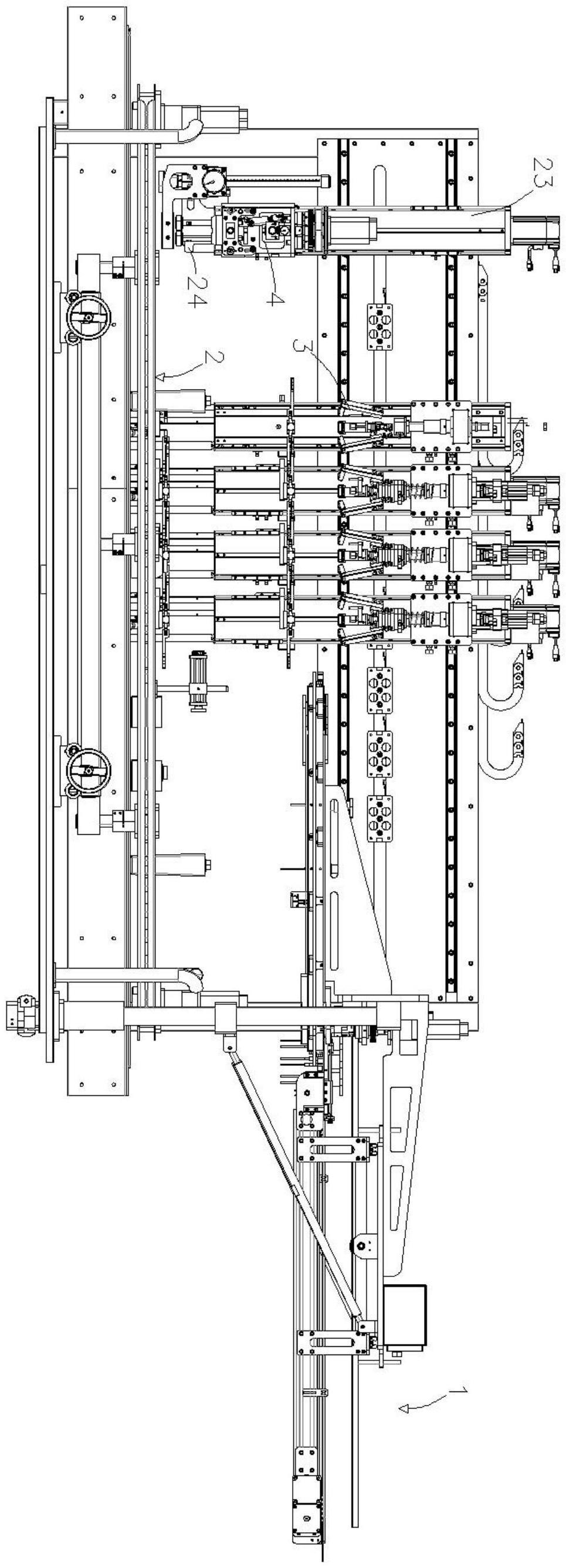
3、本实用新型是一种旋盖机,包括:泵盖入料机构,其适于运送泵盖;瓶身输送机构,其适于运送瓶身;旋盖抓手,其在驱动机构带动下做两轴直线运动,其适于抓取所述泵盖入料机构上的泵盖插入至所述瓶身输送机构的瓶身内,并进行预紧;拧紧机构,其设置在所述瓶身输送机构末端,其适于将泵盖、瓶身拧紧;
4、在本方案中,通过泵盖入料机构的间距入料,随后多个旋盖抓手通过驱动机构运动并抓取对应泵盖,随后在通过驱动机构将泵盖运送并插入至瓶身处,在瓶身的运动过中对瓶身、泵盖进行预紧,当瓶身、泵盖运动至瓶身输送机构末端时,通过拧紧机构将瓶身、泵盖两者进行拧紧,完成瓶身、泵盖的配合;
5、此外,拧紧机构是将瓶身夹紧,通过多个转动轮与泵盖的外壁进行摩擦,使得泵盖进行转动,进而将瓶身、泵盖进行拧紧,此为现有技术,在本方案中不做具体阐述。
6、旋盖抓手动作为抓取泵盖,并进行旋转下压,同样为现有技术,在本方案中不做具体阐述。
7、为了说明泵盖入料机构的具体结构,本实用新型采用泵盖入料机构包括:泵盖输送料道;软管夹紧机构,其与所述泵盖输送料道末端连接,其适于夹紧泵盖的软管处,并带动泵盖进行运输;拨料机构,其设置在所述泵盖输送料道与所述软管夹紧机构的连接处,其适于将泵盖从所述泵盖输送料道间隔拨入至所述软管夹紧机构内;
8、在本方案中,泵盖输送料道为常规的输送料道,其将泵盖进行直线运输;将泵盖运动至泵盖输送料道末端时,拨料机构间隔进行动作,将泵盖间隔运送至软管夹紧机构入料处,随后软管夹紧机构夹紧泵盖的软管进行运输,泵盖能够间隔在软管夹紧机构进行运动。
9、为了说明软管夹紧机构的具体结构,本实用新型采用软管夹紧机构包括:水平布置的第一回转料道、第二回转料道,所述第一回转料道、第二回转料道之间形成供软管穿过的间隙;第二驱动机构,其适于驱动所述第一回转料道、第二回转料道的旋向相反;夹紧块,其间隔布置在所述第一回转料道、第二回转料道的履带上,当所述第一回转料道、第二回转料道的所述夹紧块运动至呈相对设置时,此时两所述夹紧块夹紧泵盖的软管处,并带动泵盖进行运输;
10、第一回转料道、第二回转料道在第二驱动机构的带动下进行旋向相反的运动;第一回转料道、第二回转料道之间形成供泵盖软管穿过的间隙,第一回转料道、第二回转料道上均间隔布置有夹紧块,即第一回转料道的夹紧块与第二回转料道的夹紧块运动呈相对设置时,此时两夹紧块能够夹紧泵盖的软管处,并带动泵盖进行运输,实现了多个泵盖间隔运动在软管夹紧机构上。
11、由于夹紧块为刚性件,为了避免夹紧块作用在软管上,导致软管损坏,本实用新型采用所述第一回转料道上的所述夹紧块、第二所述回转料道上的所述夹紧块均连接有同步软带;
12、通过设置同步软带使得夹紧块与软管之间设置有柔性缓冲件,避免软管压紧损坏。
13、为了说明拨料结构的具体结构,本实用新型采用拨料机构包括:设置在所述泵盖输送料道两侧的气缸;延伸座,其固定在所述泵盖输送料道两侧,并向所述软管夹紧机构延伸设置;摆动件,其中部与所述延伸座铰接,其一端与泵盖相抵,另一端通过连杆与所述气缸的活塞杆铰接;当所述气缸动作,带动所述摆动件进行转动,两所述摆动件端部形成的通过间隙增大,泵盖从所述泵盖输送料道进入至所述软管夹紧机构内;
14、当气缸工作时,此时活塞杆回收,拉动连杆向后运动,进而带动摆动件进行转动,此时两摆动件端部的间距增大,有且仅供一个泵盖的通过,此泵盖通过拨料机构被软管夹紧机构夹紧;完成一个泵盖的通过后,气缸伸出,将下一泵盖进行拦截,等待下一对夹紧块靠近此泵盖时,气缸再回收。
15、为了避免损坏泵盖,本实用新型采用所述摆动件端部设置有与泵盖相抵的滚轮;
16、滚轮与泵盖为点接触,在泵盖的拨料过程中,避免了泵盖的损坏。
17、为了说明第二驱动机构的具体结构,本实用新型采用第二驱动机构包括:固定板,其设置在所述软管夹紧机构上方;电机,其设置在所述固定板上,其输出端设置有第一齿轮;第二齿轮,其转动设置在所述固定板上,并与所述第一齿轮啮合,其通过传动轴与所述第一回转料道的主动轮连接;第三齿轮,其转动设置在所述固定板上,其通过过渡轮与所述第一齿轮啮合,其通过传动轴与所述第二回转料道的主动轮连接;
18、在本方案中,电机的输出端设置有第一齿轮,第一齿轮分别与第二齿轮、过渡轮啮合,过渡轮与第三齿轮啮合,使得第二齿轮、第三齿轮两者的旋向相反,第二齿轮通过传动轴与第一回转料道的主动轮连接,第三齿轮通过传动轴与第二回转料道的主动轮连接,这样设置能够实现第一回转料道、第二回转料道的旋向相反。
19、为了说明驱动机构的具体结构,本实用新型采用驱动机构包括:竖梁,其背部与机架横向滑动设置,其正面与所述旋盖抓手升降设置;
20、在本方案中,驱动机构能够驱动旋盖抓手进行两轴直线运动,机架上水平设置有滑轨,机架背部与滑轨配合的滑块,每个竖梁的背部设置独立的电机,通过电机驱动齿轮转动,进而实现齿轮、齿条的啮合,实现竖梁的平移;
21、同样旋盖抓手与机架的正面通过滑轨、滑块以及齿轮齿条的配合实现旋盖抓手相对于竖梁的升降运动。
22、在瓶身与泵盖的拧紧过程中,由于泵盖的泵嘴方向不确定,导致泵盖在进入拧紧机构的过程中,泵嘴与拧紧机构发生干涉而无法进入至拧紧机构内,为了解决上述问题,本实用新型采用所述拧紧机构的入口处对称设置有两导向杆;
23、泵嘴穿过两导向杆之间,对泵嘴有导向作用,使得泵嘴进行复位,避免与拧紧机构发生干涉,能够将泵嘴顺利进入至拧紧机构内。
24、本实用新型的有益效果:本实用新型是一种旋盖机,通过泵盖入料机构的间距入料,随后多个旋盖抓手通过驱动机构运动并抓取对应泵盖,随后在通过驱动机构将泵盖运送并插入至瓶身处,在瓶身的运动过中对瓶身、泵盖进行预紧,当瓶身、泵盖运动至瓶身输送机构末端时,通过拧紧机构将瓶身、泵盖两者进行拧紧,完成瓶身、泵盖的配合;通过泵盖入料机构实现了能够让多个泵盖间距入料。
技术特征:
1.一种旋盖机,其特征在于,包括:
2.根据权利要求1所述的一种旋盖机,其特征在于,所述泵盖入料机构包括:
3.根据权利要求2所述的一种旋盖机,其特征在于,所述软管夹紧机构包括:
4.根据权利要求3所述的一种旋盖机,其特征在于,所述第一回转料道上的所述夹紧块、第二所述回转料道上的所述夹紧块均连接有同步软带。
5.根据权利要求2所述的一种旋盖机,其特征在于,所述拨料机构包括:
6.根据权利要求5所述的一种旋盖机,其特征在于,所述摆动件端部设置有与泵盖相抵的滚轮。
7.根据权利要求3所述的一种旋盖机,其特征在于,所述第二驱动机构包括:
8.根据权利要求1所述的一种旋盖机,其特征在于,所述驱动机构包括:
9.根据权利要求1所述的一种旋盖机,其特征在于,所述拧紧机构的入口处对称设置有两导向杆。
技术总结
本技术是一种旋盖机,包括:泵盖入料机构,其适于运送泵盖;瓶身输送机构,其适于运送瓶身;旋盖抓手,其在驱动机构带动下做两轴直线运动,其适于抓取所述泵盖入料机构上的泵盖插入至所述瓶身输送机构的瓶身内,并进行预紧;拧紧机构,其设置在所述瓶身输送机构末端,其适于将泵盖、瓶身拧紧;通过泵盖入料机构的间距入料,随后多个旋盖抓手通过驱动机构运动并抓取对应泵盖,随后在通过驱动机构将泵盖运送并插入至瓶身处,在瓶身的运动过中对瓶身、泵盖进行预紧,当瓶身、泵盖运动至瓶身输送机构末端时,通过拧紧机构将瓶身、泵盖两者进行拧紧,完成瓶身、泵盖的配合;通过泵盖入料机构实现了能够让多个泵盖间距入料。
技术研发人员:喻宗勇,徐方亭
受保护的技术使用者:常州市泰瑞包装科技有限公司
技术研发日:20230118
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!