加氢机器人的控制方法与流程
本公开涉及机器人控制,具体地,涉及一种加氢机器人的控制方法。
背景技术:
1、氢能车辆是以氢作为能源的车辆,将氢反应所产生的化学能转换为机械能以推动车辆。加氢站作为给氢能车辆提供氢气的基础设施,加氢站的数量也在不断增长,加氢站在给氢能车辆加氢时,通常采用加氢机器人进行加氢作业,氢能车辆上设置有加氢底座,加氢底座上开设有加氢口,加氢机器人上的加氢枪与加氢口连接,这样无需人工操作,提高了工作效率也节约了劳动成本。在加氢作业时,不同的氢能车辆的加氢口的位置不同,同时加氢口的位置也会随着氢能车辆的停放位置的改变而发生改变,在加氢口的位置改变后,加氢机器人通常需要多次调节加氢枪的位置,才能够使加氢枪对准加氢口,影响了加氢机器人的工作效率。
技术实现思路
1、本公开的目的是提供一种加氢机器人的控制方法,以解决相关技术中在加氢口的位置改变后,加氢机器人通常需要多次调节加氢枪的位置使得加氢机器人的工作效率低的问题。
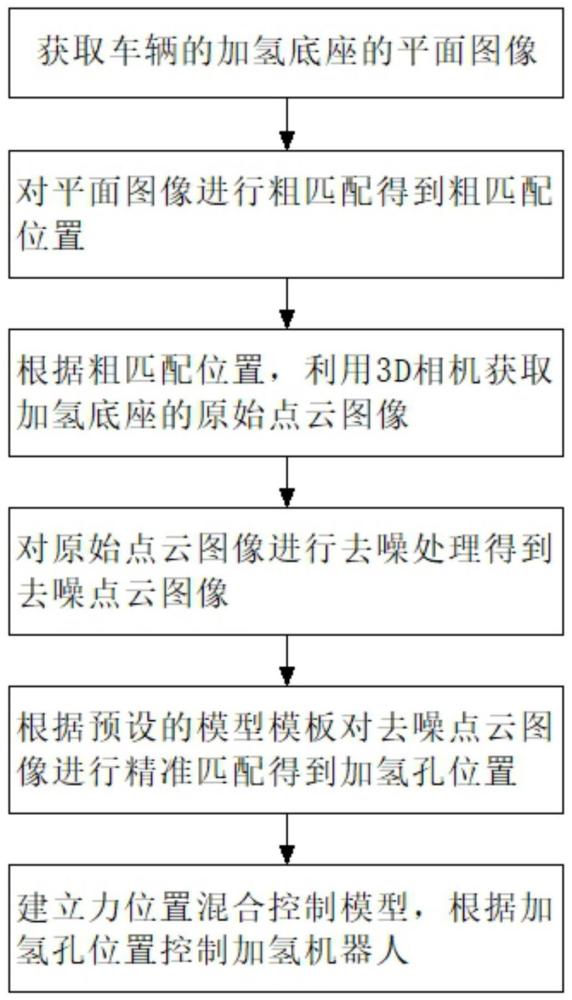
2、为了实现上述目的,本公开提供一种加氢机器人的控制方法,包括以下步骤:
3、获取车辆的加氢底座的2d平面图像和3d点云图像;
4、采用基于深度学习的2d识别技术对所述2d平面图像进行粗匹配得到所述加氢底座的粗匹配位置;
5、根据所述粗匹配位置,对所述3d点云图像进行裁剪得到所述加氢底座的原始点云图像;
6、对所述原始点云图像进行去噪处理,得到去噪点云图像;
7、根据预设的加氢口模板对所述去噪点云图像进行精准匹配得到所述加氢底座的加氢口图像;
8、根据预设的模型模板对所述加氢口图像进一步精准匹配得到所述加氢底座的加氢口,并确定所述加氢口位置;
9、建立加氢机器人的力位置混合控制模型,根据所述加氢口位置、力位置混合控制模型控制所述加氢机器人将加氢枪插入所述加氢底座的加氢口。
10、可选地,利用3d相机的2d模式获取所述2d平面图像。
11、可选地,所述粗匹配具体为:
12、将所述2d平面图像输入卷积神经网络进行抽取特征;
13、将抽取的特征输入第二层的transformer encoder-decoder得到粗匹配位置。
14、可选地,所述去噪处理具体为:
15、根据所述粗匹配位置,将所述原始点云图像在xy两个方向进行过滤降噪处理,得到感兴趣区域;
16、对所述感兴趣区域的点云进行边界分割;
17、对分割得到的所述感兴趣区域进行进一步的过滤降噪,得到所述去噪点云图像,所述去噪点云图像含有所述加氢底座的点云数据。
18、可选地,所述过滤降噪包括半径去噪、统计去噪中的至少一种。
19、可选地,根据预设的模型模板对所述去噪点云图像进行小模板精准匹配得到所述加氢底座的加氢口,并确定所述加氢口位置。
20、可选地,建立所述力位置混合控制模型具体过程为:
21、以刚性平面为xoy平面,垂直于刚性平面向外的方向作为z轴方向;
22、当所述加氢机器人的末端向刚性平面移动而尚未接触到刚性平面时,在x轴方向、y轴方向和z轴方向上,所述加氢机器人为位置控制;
23、当所述加氢机器人的末端接触到刚性平面时,在x轴方向和y轴方向上,所述加氢机器人为位置控制,在z轴方向上,所述加氢机器人为力控制;在x轴方向和y轴方向上仍然是位置控制,而没有力控制。
24、可选地,未接触到刚性平面时,所述力位置混合控制模型满足自然约束;接触到刚性平面时,所述力位置混合控制模型满足自然约束和人为约束;
25、自然约束是根据任务的几何结构所确定的约束关系,表示为:
26、
27、人为约束是根据任务的要求设定的期望运动,表示为:
28、
29、其中,fx表示沿x轴方向的力,fy表示沿y轴方向的力,fz表示沿z轴方向的力,fdz表示沿z轴方向的期望力,gx表示沿x轴方向的力矩,gy表示沿y轴方向的力矩,gz表示沿z轴方向的力矩,vx表示沿x轴方向的平移速度,vy表示沿y轴方向的平移速度,vz表示沿z轴方向的平移速度,wx表示沿x轴方向的转动速度,wy表示沿y轴方向的转动速度,wz表示沿z轴方向的转动速度,vdx表示沿x轴方向的期望速度,vdy表示沿y轴方向的期望速度,vdz表示沿z轴方向的期望速度。
30、可选地,所述位置控制的过程为:以所述加氢机器人的关节沿x轴、y轴和z轴的期望位移量为设定值,以所述加氢机器人各关节的位置传感器检测值作为位移反馈值,以期望位移量与位移反馈值之间的差值作为所述加氢机器人控制器的输入值进行控制;
31、所述力控制的过程为:以所述加氢机器人的关节沿x轴、y轴和z轴的期望力矩为设定值,以加氢机器人各关节的力矩传感器检测值作为力矩反馈值,以期望力矩量与力矩反馈值之间的差值作为所述加氢机器人控制器的输入值进行控制。
32、可选地,所述力控制的过程中,所述加氢机器人末端关节所需的关节力矩τ为:
33、
34、其中,h为关节空间惯性矩阵,q驱动关节角度向量,c为为哥氏力和向心力计算矩阵,g为末端负载重力,τf为末端关节受到的摩擦力,fload为环境作用力。
35、通过上述技术方案,先获取加氢底座的2d平面图像和3d点云图像,进行粗匹配得到加氢底座的粗匹配位置,再根据粗匹配位置对3d点云图像裁剪获取加氢底座的原始点云图像,进行去噪处理后通过模型模板进行小模板匹配,可以得到加氢底座加氢口的准确位置,保证加氢机器人的位置控制的准确性,可以更好的使得加氢枪对正加氢口,以提高工作效率。同时建立加氢机器人的力位置混合控制模型,可以校正由视觉定位加氢口时引入的误差信号,加氢机器人可以根据误差信号进行力矩调整,使加氢机器人在使用时具有适应性和柔顺性,实现柔顺的加氢作业,柔顺的加氢作业可以提高加氢过程的适应性和灵活性,使加氢机器人能够根据实时力反馈进行调整,以实现更精确和可靠的加氢操作。
36、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种加氢机器人的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种加氢机器人的控制方法,其特征在于,利用3d相机的2d模式获取所述2d平面图像。
3.根据权利要求2所述的一种加氢机器人的控制方法,其特征在于,所述粗匹配具体为:
4.根据权利要求1所述的一种加氢机器人的控制方法,其特征在于,所述去噪处理具体为:
5.根据权利要求4所述的一种加氢机器人的控制方法,其特征在于,所述过滤降噪包括半径去噪、统计去噪中的至少一种。
6.根据权利要求1所述的一种加氢机器人的控制方法,其特征在于,根据预设的模型模板对所述去噪点云图像进行小模板精准匹配,得到所述加氢底座的加氢口,并确定所述加氢口位置。
7.根据权利要求1所述的一种加氢机器人的控制方法,其特征在于,建立所述力位置混合控制模型具体过程为:以刚性平面为xoy平面,垂直于刚性平面向外的方向作为z轴方向;
8.根据权利要求1所述的一种加氢机器人的控制方法,其特征在于,未接触到刚性平面时,所述力位置混合控制模型满足自然约束;接触到刚性平面时,所述力位置混合控制模型满足自然约束和人为约束;
9.根据权利要求7所述的一种加氢机器人的控制方法,其特征在于,所述位置控制的过程为:以所述加氢机器人的关节沿x轴、y轴和z轴的期望位移量为设定值,以所述加氢机器人各关节的位置传感器检测值作为位移反馈值,以期望位移量与位移反馈值之间的差值作为所述加氢机器人控制器的输入值进行控制;
10.根据权利要求7所述的一种加氢机器人的控制方法,其特征在于,所述力控制的过程中,所述加氢机器人末端的关节所需的关节力矩τ为:
技术总结
本公开涉及一种加氢机器人的控制方法,包括获取车辆的加氢底座的2D平面图像和3D点云图像;采用基于深度学习的2D识别技术对2D平面图像进行粗匹配得到加氢底座的粗匹配位置;根据粗匹配位置,对3D点云图像进行裁剪得到加氢底座的原始点云图像;对原始点云图像进行去噪处理,得到去噪点云图像;根据预设的加氢口模板对去噪点云图像进行精准匹配得到加氢底座的加氢口图像;根据预设的模型模板对去噪点云加氢口图像进一步精准匹配得到加氢底座的加氢口,并确定加氢口位置;建立加氢机器人的力位置混合控制模型,根据加氢口位置、力位置混合控制模型控制加氢机器人将加氢枪插入加氢底座的加氢口。通过上述技术方案可以提高加氢机器人工作效率。
技术研发人员:刘玮,刘显成,杨康,刘梓壮,戴佳希,薛源,周磊,边辉,宋健
受保护的技术使用者:国华能源投资有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!