一种局域监视多雷达目标跟踪方法
1.本发明属于目标检测技术领域,具体为一种局域监视多雷达目标跟踪方法。
背景技术:
2.局域监视雷达目标跟踪在民用和军用领域都有着重要的作用,因此局域监视目标跟踪的研究具有广阔的前景和重要的实践意义。多传感器系统通过雷达目标探测信息共享,更高效地实现区域内目标的探测、识别、跟踪等任务,提高目标探测性能及可靠性。在采用多雷达对目标进行追踪时,对数据进行关联时,需要将各传感器的测量值统合进同一个坐标系时,此时匹配误差问题问题是不可避免的,现有的很多研究多传感器多目标跟踪时都忽视了这个误差。
技术实现要素:
3.本发明的目的在于提出了一种局域监视多雷达目标跟踪方法。
4.实现本发明目的的技术解决方案为:一种局域监视多雷达目标跟踪方法,具体步骤为:
5.步骤1:采用两部传感器进行局域监视,且目标始终运动在两部传感器的检测范围内;
6.步骤2:预测目标运动强度;
7.步骤3:对预测强度进行更新;
8.步骤4:对更新后的预测强度进行剪枝、合并;
9.步骤5:对目标数目与状态进行估计。
10.本发明与现有技术相比,其显著优点为:本发明优化了整合多传感器数据时的匹配误差问题,不仅增加了探测和跟踪范围,还拥有更高的检测精度和跟踪精度。
11.下面结合附图对本发明做进一步详细的描述。
附图说明
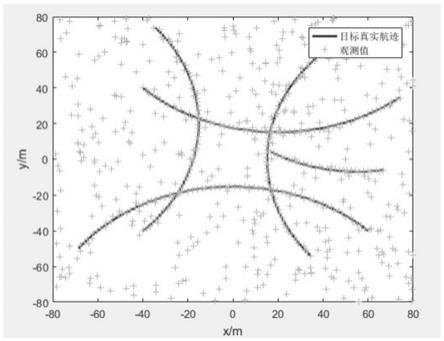
12.图1为杂波环境下各目标真实轨迹及测量值点迹示意图。
13.图2为基于匹配误差的gmphd算法多目标跟踪图。
14.图3为目标个数跟踪图。
15.图4为多目标跟踪结果ospa距离图。
具体实施方式
16.一种局域监视多雷达目标跟踪方法,具体步骤为:
17.步骤1:采用两部传感器进行局域监视,且目标始终运动在两部传感器的检测范围内;
18.步骤2:预测目标运动强度;
19.假设传感器的后验强度满足高斯混合形式:
[0020][0021]
预测强度满足高斯混合形式:
[0022]
v
k|k-1
=v
s,k|k-1
+v
β,k|k-1
+γ(x
k
,b
k
)
[0023]
则:
[0024][0025][0026][0027][0028][0029][0030][0031][0032][0033][0034]
步骤3:对预测强度进行更新,预测强度表示为:
[0035][0036]
依次更新每个传感器的后验强度:
[0037][0038][0039]
其中:
[0040][0041]
[0042][0043][0044][0045][0046][0047][0048][0049]
在更新步骤中,两次卡尔曼滤波过程并不是最优的,这样做的目的是为了保证在每个时刻更新的后验强度具有相同的形式,状态估计和偏差估计能够以解耦的形式表示。
[0050]
步骤4:对更新后的预测强度进行剪枝、合并
[0051]
经过更新后高斯项目的数目将随时间无限制的增加,因此需要采用剪枝合并的方法来解决这一问题。设定修剪阈值为τ,对更新得到的高斯分布进行剪枝,删除小于该阈值的高斯分布,具体为:
[0052][0053]
合并接近的高斯分布,即集合:
[0054][0055]
合并后,新的高斯分布:
[0056][0057][0058]
步骤5:对目标数目与状态进行估计:
[0059]
目标数目估计为:
[0060][0061]
取整后可获得目标数目,按照上述步骤输出合并后状态记作。
[0062][0063]
实施例1
[0064]
一种局域监视多雷达目标跟踪系统,设定监视区域为[-80m,80m]
×
[-80m,80m]的二维平面,各目标的初始状态如下表所示,目标5为目标2在k=50s时刻衍生出的目标,整个过程中杂波的出现服从泊松分布。
[0065][0066]
相关参数设置如下:
[0067][0068][0069]
采样间隔t=1s,ω=0.025,目标存活概率p
s
=0.95,检测概率p
d
=0.99,合并门限为5,允许最大高斯分量个数j
max
=100,取剪枝阈值τ=10-5
,每次扫描平均杂波数为3,选取ospa距离为评价指标c=10,p=2,仿真时长100s。
[0070]
采用两部传感器进行局域监视,且目标始终运动在两部传感器的检测范围内
[0071][0072]
其中为标号l传感器的位置,为该传感器测量偏置,测量噪声设定为协方差矩阵为的0均值高斯白噪声。设两部传感器的位置位于坐标(0,0)m,(80,80)m。两部传感器的偏置设定为(0,π/360)和(4,π/120)。对gmphd-re算法进行仿真,同时与gm-phd算法进行算法性能对比。
[0073]
由图1可见本发明中多传感器可在较强杂波的非线性条件下进行量测与跟踪。如图2所示,通过gmphd-re算法的跟踪点迹与真实轨迹基本一致。图3中,跟踪模型数量随时间变化,目标最少时为1,最多时为5,且有4个目标误跟点。图4对比了未引入偏置误差的gmphd算法与gmphd-re算法的ospa距离。
技术特征:
1.一种局域监视多雷达目标跟踪方法,其特征在于,具体步骤为:步骤1:采用两部传感器进行局域监视,且目标始终运动在两部传感器的检测范围内;步骤2:预测目标运动强度;步骤3:对预测强度进行更新;步骤4:对更新后的预测强度进行剪枝、合并;步骤5:对目标数目与状态进行估计。2.根据权利要求1所述的局域监视多雷达目标跟踪方法,其特征在于,预测目标运动强度,具体为:假设传感器的后验强度满足高斯混合形式:预测强度满足高斯混合形式:v
k|k-1
=v
s,k|k-1
+v
β,k|k-1
+γ(x
k
,b
k
)则:则:则:则:则:则:则:则:则:则:3.根据权利要求1所述的局域监视多雷达目标跟踪方法,其特征在于,预测目标运动强度具体为:预测强度表示为:依次更新每个传感器的后验强度:
其中:其中:其中:其中:其中:其中:其中:其中:其中:
技术总结
本发明提出了一种局域监视多雷达目标跟踪方法,包括:采用两部传感器进行局域监视,且目标始终运动在两部传感器的检测范围内;预测目标运动强度;对预测强度进行更新;对更新后的预测强度进行剪枝、合并;对目标数目与状态进行估计。本发明优化了整合多传感器数据时的匹配误差问题,不仅增加了探测和跟踪范围,还拥有更高的检测精度和跟踪精度。拥有更高的检测精度和跟踪精度。拥有更高的检测精度和跟踪精度。
技术研发人员:郭晗 吴礼
受保护的技术使用者:南京理工大学
技术研发日:2020.04.08
技术公布日:2021/10/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1