一种基于ROV操作的海底喷口流体红外测温装置
一种基于rov操作的海底喷口流体红外测温装置
技术领域
1.本发明属于海底喷口流体研究领域,具体地说是一种基于rov操作的海底喷口流体红外测温装置。
背景技术:
2.喷口流体在洋壳和海水中的循环过程伴随着复杂的物理化学变化,一直是海底热液活动研究的重要内容。海底热液活动涉及到高温高压的异常环境,室内的模拟实验是深入认识海底热液活动作用过程的重要手段。目前,针对海底热液活动深海调查技术的开发在国内尚处于起步阶段,实验模拟技术的发展水平更是相对滞后;虽然国内已有实验室引进了相关喷口流体保真采样器的模拟实验装置,例如基于rov(遥控无人潜水器)机械手手持海底热液流体红外测温装置,但是其装置结构复杂,难以操控的缺点,使得实验过程中整体操作麻烦。
技术实现要素:
3.为了解决现有rov机械手手持海底热液流体红外测温装置存在的结构复杂,难以操控的问题,本发明的目的在于提供一种基于rov操作的海底喷口流体红外测温装置。
4.本发明的目的是通过以下技术方案来实现的:
5.本发明包括主体、调节杆、缓冲弹簧、伸缩杆组件、承接块、机械手抓、连接杆及夹具,其中主体顶部安装有控制面板,所述调节杆可相对滑动地设置于主体内,并在滑动到位后通过插入主体内的锁紧螺栓固定,该调节杆的顶部通过所述缓冲弹簧与主体的内壁相连,所述伸缩杆组件的上端铰接于调节杆的下部,该伸缩杆组件的下端与所述主体铰接;所述主体的底部安装有承接块,该承接块的两侧对称设有机械手抓,每侧的所述机械手抓的上端与伸缩杆组件铰接,下端安装有夹具,所述承接块与每侧的机械手抓之间均设有连接杆,所述连接杆的上端与承接块铰接,该连接杆的下端与所述机械手抓铰接。
6.其中:所述主体的表面沿高度方向开设有开槽,所述锁紧螺栓由该开槽插入;所述主体的内部沿高度方向开设有滑槽,所述开槽与该滑槽相连通,所述滑槽内嵌有滑块,该滑块与所述调节杆固接。
7.所述调节杆高度方向的截面呈“t”形,该“t”形横边的两端分别由所述主体两侧沿高度方向开设的条形槽伸出,所述“t”形竖边与滑块固接;所述伸缩杆组件的上端铰接于“t”形竖边。
8.所述伸缩杆组件为四根伸缩杆依次铰接而成的菱形结构,该菱形结构上下两端的铰轴分别与所述调节杆、主体的底部铰接,所述菱形结构左右两侧的铰轴分别与两侧的机械手抓的上端铰接。
9.所述夹具的内壁设有多个垫片,每个所述垫片与夹具的内壁之间通过多个复位弹簧连接。
10.所述夹具为半圆形。
11.本发明的优点与积极效果为:
12.本发明主体通过设置有伸缩杆组件和机械手抓的配合使用,操作时,机械手抓可通过滑块带动调节杆在滑槽内竖向移动,并和菱形铰接的伸缩杆组件配合进行竖向移动,从而实现对两侧夹具进行调节适宜的夹持间距,来夹持样本或其他物件竖向深入海中进行检测;反之则可实将海内的物品竖向夹持取出;具有结构简单、性能好、操作简单的特点。
附图说明
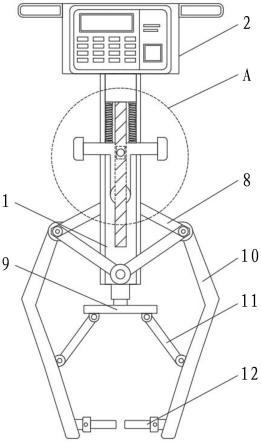
13.图1为本发明的结构主视图之一;
14.图2为本发明的结构主视图之二;
15.图3为图1中的a处放大图;
16.图4为本发明夹具的结构俯视图;
17.其中:1为主体,2为控制面板,3为滑槽,4为滑块,5为调节杆,6为锁紧螺栓,7为缓冲弹簧,8为伸缩杆组件,9为承接块,10为机械手抓,11为连接杆,12为夹具,13为垫片,14为开槽,15为复位弹簧。
具体实施方式
18.下面结合附图对本发明作进一步详述。
19.如图1~4所示,本发明包括主体1、调节杆5、缓冲弹簧7、伸缩杆组件8、承接块9、机械手抓10、连接杆11及夹具12,其中主体1顶部安装有控制面板2,调节杆5可相对滑动地设置于主体1内,并在滑动到位后通过插入主体1内的锁紧螺栓6固定,该调节杆5顶部的两侧均通过缓冲弹簧7与主体1的内壁相连,伸缩杆组件8的上端铰接于调节杆5的下部,该伸缩杆组件8的下端与主体1铰接;主体1的底部安装有承接块9,该承接块9的顶部与主体1的底部固接,承接块9的两侧对称设有机械手抓10,每侧的机械手抓10的上端与伸缩杆组件8铰接,下端安装有夹具12,承接块9与每侧的机械手抓10之间均设有连接杆11,连接杆11的上端与承接块9的底部铰接,该连接杆11的下端与机械手抓10铰接。
20.本实施例的主体1为中空的长方体,主体1的表面沿高度方向开设有开槽14,锁紧螺栓6由该开槽14插入;主体1的内部沿高度方向开设有滑槽3,开槽14与该滑槽3相连通,滑槽3内嵌有滑块4,该滑块4与调节杆5固接。
21.本实施例的调节杆5高度方向的截面呈“t”形,该“t”形横边的两端分别由主体1两侧沿高度方向开设的条形槽伸出,“t”形竖边与滑块4固接;伸缩杆组件8的上端铰接于“t”形竖边。
22.本实施例的伸缩杆组件8为四根伸缩杆依次铰接而成的菱形结构,该菱形结构上下两端的铰轴分别与调节杆5、主体1的底部铰接,菱形结构左右两侧的铰轴分别与两侧的机械手抓10的上端铰接。伸缩杆组件8与主体1构成活动式连接,通过滑块4在滑槽3内竖向滑动作用,以及配合铰接的菱形的伸缩杆组件8的作用,试验人员手持调节杆5,推动伸缩杆组件8带动机械手抓10进行调节两组夹具12之间的夹持间距,来夹持样本或其他物件竖向深入喷口中进行检测,反之则可实施将喷口内的物品竖向夹持取出,结构简单、性能好、操作简单。
23.本实施例的两侧的夹具12均为半圆形,夹具12的内壁设有多个垫片13,每个垫片
13与夹具12的内壁之间通过多个复位弹簧15连接。两侧的夹具12将物品紧紧夹持,同时由于复位弹簧15的自身弹力以及配合垫片13的使用,可有效减少由于夹持力过大对物品造成损伤的情况。
24.本发明的工作原理为:
25.准备试验时,通过滑块4在滑槽3内竖向滑动作用,以及配合铰接的菱形的伸缩杆组件8的作用,试验人员手持调节杆5,推动伸缩杆组件8带动机械手抓10进行调节两组夹具12之间的夹持间距,使两侧的夹具12将样本或其他物件夹持好,同时也通过缓冲弹簧7的自身弹力作用,起到稳定作用;同时,通过多组复位弹簧15的自身弹力作用,使得两侧的夹具12将物品紧紧夹持的同时,也减少由于夹持力过大对物品造成损伤的情况。随后,试验人员拧紧锁紧螺栓6,将滑块4固定在滑槽3内后,试验人员手持整个测温装置竖向深入实验室中装载海水的容器里进行检测,即可完成一次检测操作。最后,将检测完毕后的整个测温装置取出即可。
技术特征:
1.一种基于rov操作的海底喷口流体红外测温装置,其特征在于:包括主体(1)、调节杆(5)、缓冲弹簧(7)、伸缩杆组件(8)、承接块(9)、机械手抓(10)、连接杆(11)及夹具(12),其中主体(1)顶部安装有控制面板(2),所述调节杆(5)可相对滑动地设置于主体(1)内,并在滑动到位后通过插入主体(1)内的锁紧螺栓(6)固定,该调节杆(5)的顶部通过所述缓冲弹簧(7)与主体(1)的内壁相连,所述伸缩杆组件(8)的上端铰接于调节杆(5)的下部,该伸缩杆组件(8)的下端与所述主体(1)铰接;所述主体(1)的底部安装有承接块(9),该承接块(9)的两侧对称设有机械手抓(10),每侧的所述机械手抓(10)的上端与伸缩杆组件(8)铰接,下端安装有夹具(12),所述承接块(9)与每侧的机械手抓(10)之间均设有连接杆(11),所述连接杆(11)的上端与承接块(9)铰接,该连接杆(11)的下端与所述机械手抓(10)铰接。2.根据权利要求1所述基于rov操作的海底喷口流体红外测温装置,其特征在于:所述主体(1)的表面沿高度方向开设有开槽(14),所述锁紧螺栓(6)由该开槽(14)插入;所述主体(1)的内部沿高度方向开设有滑槽(3),所述开槽(14)与该滑槽(3)相连通,所述滑槽(3)内嵌有滑块(4),该滑块(4)与所述调节杆(5)固接。3.根据权利要求2所述基于rov操作的海底喷口流体红外测温装置,其特征在于:所述调节杆(5)高度方向的截面呈“t”形,该“t”形横边的两端分别由所述主体(1)两侧沿高度方向开设的条形槽伸出,所述“t”形竖边与滑块(4)固接;所述伸缩杆组件(8)的上端铰接于“t”形竖边。4.根据权利要求1所述基于rov操作的海底喷口流体红外测温装置,其特征在于:所述伸缩杆组件(8)为四根伸缩杆依次铰接而成的菱形结构,该菱形结构上下两端的铰轴分别与所述调节杆(5)、主体(1)的底部铰接,所述菱形结构左右两侧的铰轴分别与两侧的机械手抓(10)的上端铰接。5.根据权利要求1所述基于rov操作的海底喷口流体红外测温装置,其特征在于:所述夹具(12)的内壁设有多个垫片(13),每个所述垫片(13)与夹具(12)的内壁之间通过多个复位弹簧(15)连接。6.根据权利要求1所述基于rov操作的海底喷口流体红外测温装置,其特征在于:所述夹具(12)为半圆形。
技术总结
本发明属于海底喷口流体研究领域,具体地说是一种基于ROV操作的海底喷口流体红外测温装置,主体顶部安装有控制面板,调节杆可相对滑动地设置于主体内,并在滑动到位后通过插入主体内的锁紧螺栓固定,调节杆的顶部通过缓冲弹簧与主体的内壁相连,伸缩杆组件的上端铰接于调节杆的下部,伸缩杆组件的下端与主体铰接;主体的底部安装有承接块,承接块的两侧对称设有机械手抓,每侧的机械手抓的上端与伸缩杆组件铰接,下端安装有夹具,承接块与每侧的机械手抓之间均设有连接杆,连接杆的上端与承接块铰接,连接杆的下端与机械手抓铰接。本发明具有结构简单、性能好、操作简单的特点。操作简单的特点。操作简单的特点。
技术研发人员:曾志刚 殷学博 齐海燕
受保护的技术使用者:中国科学院海洋研究所
技术研发日:2020.12.22
技术公布日:2022/6/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1