多通道协调加载的电反馈式无人直升机传动试验系统的制作方法
1.本实用新型涉及一种无人直升机传动试验系统,具体讲是一种多通道协调加载的电反馈式无人直升机传动试验系统,属于无人直升机制造领域。
背景技术:
2.无人直升机的传动系统作为其三大动部件之一,它承受着旋翼、尾桨、操纵系统及发动机系统所带来的复杂的静载荷和疲劳载荷,同时不具备采取余度技术或复式传力条件。传动系统部件一旦发生疲劳直接威胁着无人直升机的飞行安全。无论军用规范还是民用适航规范,都要求传动系统在直升机寿命周期内发生疲劳破坏的概率极低。为了避免由于疲劳而产生的灾难性后果,必须对传动系统进行疲劳试验,再结合返修间隔期,科学管理传动系统零部件的修理和更换,确保飞行安全。
3.无人直升机传动系统有别于旋翼桨叶等传统的动部件,传统的动部件疲劳试验系统无法开展传动箱的疲劳试验。无人直升机传动系统结构复杂,所受载荷也不同于直升机旋翼、操纵等动部件,其不仅承受着发动机和主尾桨叶施加的扭矩,还承受着来自主尾旋翼系统带来的升力和弯矩,因此其试验系统的搭建更为复杂,需要考虑的因素更多。
4.2020年5月29日,中国实用新型专利202010321911x,公开了一种交叉双旋翼无人直升机传动装置试验台,包括传动装置、旋翼轴及支撑组件,其中待检测的传动装置用于与动力源连接;旋翼轴用于带动旋翼旋转,旋翼轴端部与传动装置的输出端固定连接,旋翼轴为两个,两个旋翼轴与传动装置的两个输出端一一对应;支撑组件用于支撑传动装置和旋翼轴。通过支撑组件支撑传动装置和旋翼轴,且实现两个旋翼轴的安装,当需要进行试验测试时,直接连接动力源即可实现传动装置的运转,有效模拟不同转速下传动装置运转的状态,从而进行传动装置模拟性能测试,简单方便,能够在无人直升机进行总装前或维修后有效检验传动装置的性能和维修结果,避免因传动装置故障酿成无法挽回的局面。但其功能单一,无法满足性能试验、磨合试验、效率试验、飞行前台架试验、疲劳试验以及批产验收试验等试验。
技术实现要素:
5.本实用新型所要解决的技术问题在于克服现有技术缺陷,提供一种能同时对无人直升机传动机构施加发动机和主尾旋翼的扭矩、主旋翼系统的升力和弯矩以及尾旋翼系统的推力的多通道协调加载的电反馈式无人直升机传动试验系统。
6.为了解决上述技术问题,本实用新型提供的多通道协调加载的电反馈式无人直升机传动试验系统,包括动力输出机构、主旋翼负载模拟机构、主减输出轴加载单元、尾旋翼负载模拟机构、尾减输出轴加载单元、数据采集处理单元和控制单元;
7.所述动力输出机构用于向待试验的无人直升机传动机构提供模拟的输入驱动;
8.所述主旋翼负载模拟机构用于模拟待试验的无人直升机传动机构实际飞行中的主旋翼扭矩;
9.所述主减输出轴加载单元用于模拟待试验的无人直升机传动机构实际飞行中的升力、侧向力及弯矩;
10.所述尾减输出轴加载单元用于模拟待试验的无人直升机传动机构实际飞行中的尾轴推力;
11.所述尾旋翼负载模拟机构用于模拟待试验的无人直升机传动机构实际飞行中的尾旋翼扭矩;
12.所述数据采集处理单元用于采集主旋翼负载模拟机构、主减输出轴加载单元和尾减输出轴加载单元的数据;
13.所述动力输出机构、主旋翼负载模拟机构、主减输出轴加载单元、尾旋翼负载模拟机构、尾减输出轴加载单元和数据采集处理单元均连接控制单元。
14.本实用新型中,所述主减输出轴加载单元包括主轴加载补偿机构、主轴径向力加载机构和主轴轴向力加载机构,所述主轴加载补偿机构、主轴径向力加载机构与待试验的无人直升机传动机构的主轴相连接;所述主轴轴向力加载机构与主轴加载补偿机构相连接。
15.本实用新型中,所述主轴径向力加载机构和主轴轴向力加载机构为电缸。
16.本实用新型中,所述主旋翼负载模拟机构包括主旋翼负载模拟电机、变速箱和第二扭矩传感器,所述主旋翼负载模拟电机连接变速箱,变速箱连接第二扭矩传感器。
17.本实用新型中,所述主旋翼负载模拟电机连接逆变单元。
18.本实用新型中,所述尾减输出轴加载单元包括尾旋翼负载模拟电机、第三扭矩传感器、尾轴加载补偿机构和尾轴轴向力加载机构;所述尾旋翼负载模拟电机连接尾轴加载补偿机构,二者之间连接第三扭矩传感器;所述尾轴加载补偿机构与模拟待试验的无人直升机传动机构的尾轴相连接;所述尾轴轴向力加载机构设置于尾轴加载补偿机构的两侧。
19.本实用新型中,所述尾旋翼负载模拟电机连接逆变单元。
20.本实用新型中,所述尾轴加载补偿机构为电缸。
21.本实用新型的有益效果在于:(1)本实用新型的试验系统可以满足无人直升机传动机构的多种试验需求,不仅可施加来自发动机和主尾桨叶施加的扭矩,还可以施加来自主尾旋翼系统带来的升力和弯矩,能模拟出无人直升机在飞行中对传动机构施加的几乎所有实际载荷,更能真实地反映无人直升机传动机构所受载情况;(2)本实用新型的试验系统中升力、推力及弯矩等载荷加载通过电缸实现,无需使用液压系统,使用安全、方便和整洁,不存在液压系统漏油风险;(3)本实用新型采用电反馈式试验,其耗电量较少,节能环保,效率高;(4)采取模块化设计,设计不同的工装夹具接口,可以适用于多种无人直升机传动系统试验;(5)本实用新型的试验系统具备开展无人直升机传动系统的多种试验能力,如性能试验、磨合试验、效率试验、飞行前台架试验、疲劳试验以及批产验收试验等,大大降低了试验成本,提高了试验效率,并可有效提升试验的整体性。
附图说明
22.图1为本实用新型试验系统原理图;
23.图2为本实用新型试验系统组成框图;
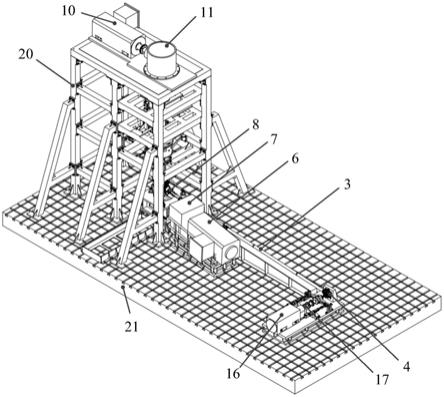
24.图3为本实用新型试验系统等轴视图;
25.图4为本实用新型试验系统前视图;
26.图5为本实用新型试验系统后视图;
27.图6为本实用新型试验系统尾减速器局部示意图;
28.图7为本实用新型试验系统控制单元组成示意图;
29.图8为本实用新型试验系统伺服加载机构原理图。
30.图中,1-主减速器、2-主轴、3-尾传动轴、4-尾减速器、5-尾轴、6-驱动电机、7
‑ꢀ
第一变速箱、8-第一扭矩传感器、9-高速联轴器、10-主旋翼负载模拟电机、11-第二变速箱、12-第二扭矩传感器、13-主轴加载补偿机构、14-主轴径向力加载机构、15-主轴轴向力加载机构、16-尾旋翼负载模拟电机、17-第三扭矩传感器、18-尾轴加载补偿机构、19-尾轴轴向力加载机构、20-试验台架、21-试验平台。
具体实施方式
31.下面结合附图对本实用新型作进一步详细说明。
32.如图1至8所示,本实用新型多通道协调加载的电反馈式无人直升机传动试验系统包括驱动电机6、第一变速箱7、第一扭矩传感器8、高速联轴器9、主旋翼负载模拟电机10、第二变速箱11、第二扭矩传感器12、主轴加载补偿机构13、主轴径向力加载机构14、主轴轴向力加载机构15、尾旋翼负载模拟电机16、第三扭矩传感器17、尾轴加载补偿机构18、尾轴轴向力加载机构19、试验台架20、试验平台21以及控制单元。
33.待试验的无人直升机传动机构包括主减速器1、主轴2、尾传动轴3、尾减速器4 和尾轴5,主减速器1上分别设有主轴2和尾传动轴3,尾传动轴3通过尾减速器4连接尾轴5。
34.驱动电机6连接第一变速箱7,第一变速箱7连接高速联轴器9,第一变速箱7与高速联轴器9之间设有第一扭矩传感器8,高速联轴器9可与待试验的无人直升机传动机构的主减速器1相连接。驱动电机6、第一变速箱7、第一扭矩传感器8、高速联轴器 9组成动力输出机构,用于模拟的是无人直升机发动机系统,为待试验的无人直升机传动机构提供模拟的输入驱动。驱动电机6、第一变速箱7和高速联轴器9均安装在试验平台21上。
35.主轴加载补偿机构13下部连接待试验的无人直升机传动机构的主轴2,上部通过第二扭矩传感器12连接第二变速箱11,第二变速箱11连接主旋翼负载模拟电机10。主旋翼负载模拟电机10、第二变速箱11和第二扭矩传感器12组成主旋翼负载模拟机构,用于模拟无人直升机主旋翼系统在实际飞行中的扭矩。主旋翼负载模拟电机10、第二变速箱11均固定安装在试验台架20上,试验台架20固定在试验平台21上。
36.主轴径向力加载机构14连接待试验的无人直升机传动机构的主轴2,位于主轴加载补偿机构13的下方。主轴径向力加载机构14用于模拟的是无人直升机主旋翼系统在实际飞行中对主轴的弯矩。
37.主轴轴向力加载机构15连接主轴加载补偿机构13,位于第二扭矩传感器12的下方。主轴轴向力加载机构15包括两个电缸,两个电缸分别设置于主轴加载补偿机构13的两侧。主轴轴向力加载机构15用于模拟的是主旋翼系统在实际飞行中对主轴的升力和侧向力。
38.尾旋翼负载模拟电机16通过第三扭矩传感器17连接尾轴加载补偿机构18,尾轴加载补偿机构18连接待试验的无人直升机传动机构的尾轴5。尾轴加载补偿机构18连接尾轴
轴向力加载机构19。尾轴轴向力加载机构19包括两个电缸,两个电缸分别设置于尾轴加载补偿机构18的两侧。尾轴轴向力加载机构19用于模拟无人直升机尾旋翼系统在实际飞行中对尾轴的推力。
39.尾旋翼负载模拟电机16固定在试验台架20上。
40.主旋翼负载模拟电机10和尾旋翼负载模拟电机16均连接逆变驱动单元。试验时,试验系统输入能量由主旋翼负载模拟电机10和尾旋翼负载模拟电机16同时发电,通过逆变驱动单元再回馈至直流母线,负载模拟电机通过逆变驱动单元由直流母线取得动力,电能不足部分由整流单元从电网补充整流后输入直流母线,回馈效率较高。
41.本实施例中,第一扭矩传感器8、第二扭矩传感器12和第三扭矩传感器17形成数据采集处理系统,用于采集主旋翼负载模拟机构、主减输出轴加载单元和尾减输出轴加载单元的数据。
42.驱动电机6、第一扭矩传感器8、主旋翼负载模拟电机10、第二扭矩传感器12、主轴加载补偿机构13、主轴径向力加载机构14、主轴轴向力加载机构15、尾旋翼负载模拟电机16、第三扭矩传感器17、尾轴加载补偿机构18、尾轴轴向力加载机构19均连接控制单元。
43.如图7所示,试验控制单元由控制计算机、操作台、加载变频器以及载荷加载伺服控制系统组成。其中,加载变频器主要控制电机对试验件施加扭矩,载荷加载伺服控制系统控制电缸对试验件施加升力、弯矩、推力等载荷。操作台放置在控制室中,负责整个系统的控制和操作。图中,el5151为编码器接口端子模块,el1008为数字量输入端子模块。
44.如图8所示,载荷加载伺服控制系统主要由伺服控制器、嵌入式下位机、拉压力传感器及伺服电缸组成,用于对主旋翼升力、侧向力、主轴弯矩以及尾旋翼的推力进行加载。其中,伺服控制器、拉压力传感器及伺服电缸一一对应。
45.本实施例中通道协调加载的电反馈式无人直升机传动试验系统还可以设置紧急供电单元(ups),在主电网故障时提供停止试验和保存数据的电力需求。
46.在实际使用过程中,本实施例的多通道协调加载的电反馈式无人直升机传动试验系统可以设置扭矩过载保护功能及安全防护装置(保护人员和其它系统)、视频监控等防护功能。
47.上述多通道协调加载的电反馈式无人直升机传动试验系统使用方法如下:
48.1)准备待试验的无人直升机传动机构。
49.2)将第1)步准备好的待试验的无人直升机传动机构,通过试验夹具和前述的试验系统进行连接。将主减速器1和试验台架固定,其连接方式和在无人直升机上安装一致;主轴2通过试验工装和主轴加载补偿机构13、主轴径向力加载机构14及主轴轴向力加载机构15连接,尾轴5通过试验工装和尾轴加载补偿机构18、尾轴轴向力加载机构19 连接,同时主减速器1通过高速联轴器9和驱动电机6连接。
50.3)调整主轴2、尾传动轴3及尾轴5的同轴度,其技术要求不低于无人直升机上使用要求。
51.4)检查试验系统的所有防护罩和防护窗口是否都关闭上锁,试验台架20和试验平台 21是否固定牢固。
52.5)开启试验系统,依据试验类型编辑试验输入载荷谱。
53.6)试验加载,实时监测转速、扭矩、载荷、振动数据及视频监控影像,确保试验安
全。
54.7)试验结束,关闭试验系统。
55.这样通过实施例的技术方案,该多通道协调加载的电功率封闭式无人直升机传动试验系统,可以实现无人直升机传动系统的性能试验、磨合试验、效率试验、飞行前台架试验、疲劳试验以及批产验收试验等。改变试验台架和工装夹具接口、模拟电机的功率及转速,可以实现不同类型的无人直升机传动系统的各类试验。
56.以上所述仅是本实用新型的优选实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干变型和改进,这些也应视为属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1