LIDAR窗口阻挡检测的制作方法
本公开总体上涉及光探测和测距(lidar)系统,并且更具体地涉及lidar系统的观察窗口上的遮挡物的检测、评估和减轻。
背景技术:
1、调频连续波(fmcw)lidar系统使用可调谐激光器对目标进行频率啁啾(frequency-chirped)照明,以及使用相干接收器检测来自目标的背散射光或反射光,这些光与发送信号的局部副本相结合。将局部副本与被到目标和返回的往返时间所延迟的返回信号混合,在接收器处生成与到系统视场中每个目标的距离成比例的拍频。
2、这些系统可以用在自动驾驶车辆上以用于导航,其中外部环境可能是恶劣的。为了保护系统的光学组件、电光组件和机械组件,通过密封窗口传送光束。然而,光束可能被雨水、水滴、泥土、道路用盐、昆虫或其他杂物遮挡,这可能阻挡光束或使光束衰减,造成安全隐患。
技术实现思路
1、本公开描述了用于检测、评估和减轻遮挡物对lidar窗口影响的lidar系统和方法的各种示例。
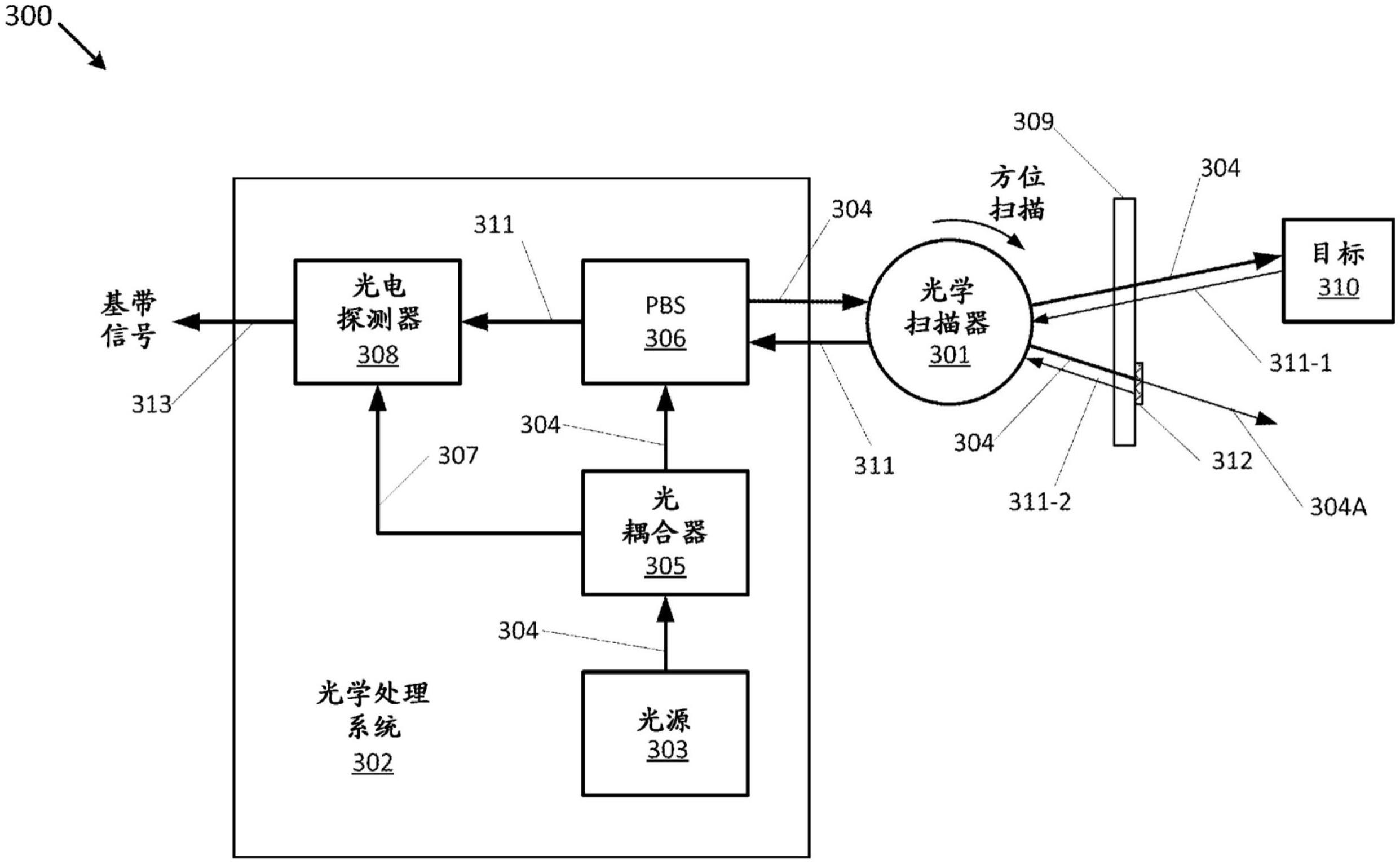
2、在一个示例中,根据本公开的lidar系统包括光学扫描器,用于传送光束通过lidar窗口,并且用于从光束的反射接收返回信号。lidar系统还包括光学处理系统,用于生成与返回信号对应的距离相关基带信号。lidar系统还包括信号处理系统,该信号处理系统包括处理器和非暂时性存储器,其中存储器包含指令,当指令由处理器执行时,使得lidar系统确定返回信号是否是由lidar窗口上的遮挡物引起,确定遮挡物对lidar系统的操作影响,以及减轻遮挡物的操作影响。
3、在一个示例中,为了确定返回信号是否是由lidar窗口上的遮挡物引起,信号处理系统被配置为探测距离相关基带信号中小于阈值频率的频率。
4、在一个示例中,为了确定遮挡物的操作影响,lidar系统被指示生成反射率图谱,以识别被遮挡的视场(fov)和由遮挡物反射的能量。
5、在一个示例中,lidar系统被指示分析fov的反射率图谱,以确定被遮挡的fov是否是安全关键fov,以及确定最大探测距离是否小于最小安全关键探测距离。
6、在一个示例中,其中lidar系统是车载系统,信号处理系统被配置为通过使车辆减速、停车和清洁lidar窗口中的一个或多个来减轻遮挡物的操作影响。
7、在一个示例中,lidar系统包括:光源,用于生成fmcw光束;光耦合器,用于接收来自光源的fmcw光束;偏振分束器(pbs),与光耦合器耦合,用于将fmcw光束引导至光学扫描器,以及用于接收来自光学扫描器的返回信号;和光电探测器(pd),用于接收来自pbs的返回信号和来自光耦合器的fmcw光束的样本,其中pd被配置为从返回信号与fmcw光束的样本的空间混合生成距离相关基带信号。
8、在一个示例中,信号处理系统包括:采样器,其与光学处理系统耦合,用于生成距离相关基带信号的时域样本;离散傅里叶变换(dft)处理器,其耦合到采样器,用于将时域样本变换到频域中;和峰值搜索处理器,其耦合到dft处理器,用于在小于阈值频率的频率处搜索能量峰值。
9、在一个示例中,信号处理系统还包括:频率补偿处理器,其耦合到峰值搜索引擎,用于校正多普勒扫描伪影;和后处理器,其耦合到频率补偿处理器,用于生成反射率图谱和lidar窗口健康报告。
10、在一个示例中,lidar系统的方法包括:从lidar返回信号检测lidar窗口上或窗口附近的遮挡物;确定lidar窗口遮挡物对lidar系统的操作影响;以及减轻lidar窗口遮挡物对lidar系统的操作影响。
11、在一个示例中,非暂时性计算机可读介质包括用于lidar系统中的处理器的指令,指令使得lidar系统从lidar返回信号检测lidar窗口上或窗口附近的遮挡物;确定lidar窗口遮挡物对lidar系统的操作影响;以及减轻lidar窗口遮挡物对lidar系统的操作影响。
技术特征:
1.一种光探测和测距lidar系统,包括:
2.根据权利要求1所述的lidar系统,其中,为了确定所述返回信号是否是由所述lidar窗口上的遮挡物引起,所述处理器还使得所述lidar系统检测所述距离相关基带信号中小于阈值频率的频率。
3.根据权利要求2所述的lidar系统,其中,为了确定所述遮挡物的所述操作影响,所述处理器还使得所述lidar系统生成反射率图谱,以识别被遮挡的视场(fov)和由所述遮挡物反射的能量。
4.根据权利要求3所述的lidar系统,其中,所述信号处理系统还用于分析fov的反射率图谱,以确定所述被遮挡的fov是否是安全关键fov,以及确定最大探测距离是否小于最小安全关键探测距离。
5.根据权利要求4所述的lidar系统,其中,所述lidar系统包括车载系统,其中,所述信号处理系统通过用于使车辆减速、用于停车和用于清洁所述lidar窗口的一个或多个命令来减轻所述遮挡物的所述操作影响。
6.根据权利要求1所述的lidar系统,其中,所述光学处理系统包括:
7.根据权利要求2所述的lidar系统,其中,所述信号处理系统包括:
8.根据权利要求6所述的lidar系统,其中,所述信号处理系统还包括:
9.一种光探测和测距(lidar)系统中的方法,包括:
10.根据权利要求9所述的方法,其中,检测所述窗口遮挡物包括:
11.根据权利要求10所述的方法,其中,检测所述距离相关基带信号中小于所述阈值频率的频率包括:
12.根据权利要求9所述的方法,其中,确定所述窗口遮挡物的所述操作影响包括:
13.根据权利要求12所述的方法,还包括:
14.根据权利要求9所述的方法,其中,所述lidar系统包括车载lidar系统,其中,减轻所述窗口遮挡物的所述操作影响包括使车辆减速、停车和清洁所述lidar窗口中的至少一个。
15.一种非暂时性计算机可读介质,包括指令,当所述指令由lidar系统中的处理器执行时,使得所述lidar系统:
16.根据权利要求15所述的计算机可读存储器,其中,为了检测所述lidar窗口遮挡物,所述lidar系统还用于:
17.根据权利要求16所述的计算机可读存储器,其中,为了检测所述距离相关基带信号中小于所述阈值频率的频率,所述lidar系统还用于:
18.根据权利要求15所述的计算机可读存储器,其中,为了确定所述lidar窗口遮挡物对所述lidar系统的操作影响,所述lidar系统还用于:
19.根据权利要求18所述的计算机可读存储器,其中,所述lidar系统还用于:
20.根据权利要求15所述的计算机可读存储器,其中,所述lidar系统包括车载系统,其中,为了减轻所述lidar窗口遮挡物的所述操作影响,指示所述lidar系统以使车辆减速、停车或清洁所述lidar窗口。
技术总结
公开了系统、方法和计算机可读介质使能的方法,用于检测FMCW LIDAR系统中的LIDAR窗口遮挡物,分析LIDAR窗口遮挡物对FMCW LIDAR系统的操作影响,以及减轻对FMCW LIDAR系统的操作影响。
技术研发人员:J·克劳斯·皮林,K·B·维斯瓦纳坦,R·T·穆尔蒂,M·雷兹克
受保护的技术使用者:艾瓦公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!