一种基于相机成像几何关系的单目测距方法及系统
1.本发明涉及自动驾驶领域,具体涉及一种基于相机成像几何关系的单目测距方法及 系统。
背景技术:
2.随着自动驾驶技术的不断进步,越来越多的技术被投入使用中,各种各样的自动驾 驶汽车被投入市场。距离测量是自动驾驶技术中十分重要的一个部分。精准测量障碍物 的距离,对于自动驾驶的路径规划以及预警系统等重要功能都有着重大的意义,甚至可 以说是基石。
3.在测距方法上主要分为主动测量与被动测量,主动测量是目前众多研究员的主要研 究方向。主动测量是通过超声波传感器、激光雷达、摄像机等车载设备进行测距。超声 波传感器成本较低,但是精度并不好,尤其在高速行驶时误差较大,适用场景较为有限。 激光雷达精度最高,但是成本造价昂贵。且这些方法不易与摄像机采集到的图像进行目 标的融合。单目相机可直接对采集到的图像进行检测,之后对目标进行距离的测量,避 免图像融合等步骤,还降低了造价,有利于其在智能车上得到推广应用。
4.单目视觉测距一般采用对应点标定法来获取图像的深度信息,对应点标定法是指通 过不同坐标系中对应点的对应坐标求解坐标系的转换关系,但使用对应点标定法时,在 标定过程中,由于受器材限制,仍无法做到十分精确地记录一个点在世界坐标系和图像 坐标系中的对应坐标如果其坐标不够精确,那么得到的转换矩阵的精确度也会受到制约, 坐标转换结果的精度也会因此而波动。由于对应点标定法对于摄像机的标定是在摄像机 的各个角度及高度已经确定的情况下进行的,当摄像机的任何一个参数发生变化时,都 要重新进行标定,以得到在该种具体情况下的转换矩阵,所以该方法仅适用于位置固定 的摄像机的情况,而对于应用在移动载体上的摄像机来说,由于摄像机载体在运动过程 中会使摄像机的参数发生变化,所以其适用性受到了限制。
技术实现要素:
5.为了解决上述技术问题,本发明提供一种基于相机成像几何关系的单目测距方法及 系统。
6.本发明技术解决方案为:一种基于相机成像几何关系的单目测距方法,包括:
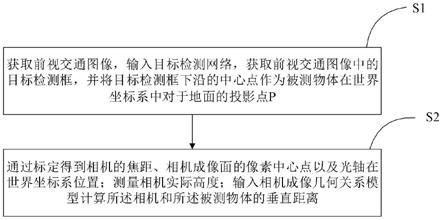
7.步骤s1:获取前视交通图像,输入目标检测网络,获取所述前视交通图像中的目标 检测框,并将所述目标检测框下沿的中心点作为被测物体在世界坐标系中对于地面的投 影点p;
8.步骤s2:通过标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标 系位置;测量所述相机实际高度;输入相机成像几何关系模型计算所述相机和所述被测 物体的垂直距离。
9.本发明与现有技术相比,具有以下优点:
10.本发明提供的方法通过单目相机可直接对采集到的图像进行检测,并对待检测目标 进行距离的测量,避免图像融合等步骤,还降低了造价,有利于其在智能车上得到推广 应用。
附图说明
11.图1为本发明实施例中一种基于相机成像几何关系的单目测距方法的流程图;
12.图2为本发明实施例中相机成像几何关系模型的成像示意图;
13.图3为本发明实施例中一种基于相机成像几何关系的单目测距方法中步骤s2:通过 标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标系位置;测量相机 实际高度;输入相机成像几何关系模型计算相机和被测物体的垂直距离的流程图;
14.图4为本发明实施例中使用基于相机成像几何关系的单目测距方法测量距离得到结 果示意图;
15.图5为本发明实施例中一种基于相机成像几何关系的单目测距系统的结构框图。
具体实施方式
16.本发明提供了一种基于相机成像几何关系的单目测距方法,通过单目相机可直接对 采集到的图像进行检测,并对待检测目标进行距离的测量,避免图像融合等步骤,还降 低了造价,有利于其在智能车上得到推广应用。
17.为了使本发明的目的、技术方案及优点更加清楚,以下通过具体实施,并结合附图,对 本发明进一步详细说明。
18.实施例一
19.如图1所示,本发明实施例提供的一种基于相机成像几何关系的单目测距方法,包括 下述步骤:
20.步骤s1:获取前视交通图像,输入目标检测网络,获取前视交通图像中的目标检测 框,并将目标检测框下沿的中心点作为被测物体在世界坐标系中对于地面的投影点p;
21.步骤s2:通过标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标 系位置;测量相机实际高度;输入相机成像几何关系模型计算相机和被测物体的垂直距 离。
22.在一个实施例中,上述步骤s1:获取前视交通图像,输入目标检测网络,获取前视 交通图像中的目标检测框,并将目标检测框下沿的中心点作为被测物体在世界坐标系中 对于地面的投影点p,具体包括:
23.将车载相机获取的前视交通图像,输入目标检测网络。本发明对目标检测网络不做 任何限制,本发明实施例采用的是yolov4目标检测网络。通过该目标检测网络对前视 交通图像进行检测,识别出图像中待测物体的目标检测框,待测物体可以是人、车辆或 是其他物体。将目标检测框下沿的中心点作为被测物体在世界坐标系中对于地面的投影 点p,如图2中所示的p。
24.如图3所示,在一个实施例中,步骤s2:通过标定得到相机的焦距、相机成像面的 像素中心点以及光轴在世界坐标系位置;测量相机实际高度;输入相机成像几何关系模 型计算相机和被测物体的垂直距离,具体包括:
对于地面的投影点p;
41.计算相机和被测物体距离模块32,用于通过标定得到相机的焦距、相机成像面的像 素中心点以及光轴在世界坐标系位置;测量相机实际高度;输入相机成像几何关系模型 计算所述相机和所述被测物体的实际距离。
42.提供以上实施例仅仅是为了描述本发明的目的,而并非要限制本发明的范围。本发 明的范围由所附权利要求限定。不脱离本发明的精神和原理而做出的各种等同替换和修 改,均应涵盖在本发明的范围之内。
技术特征:
1.一种基于相机成像几何关系的单目测距方法,其特征在于,包括:步骤s1:获取前视交通图像,输入目标检测网络,获取所述前视交通图像中的目标检测框,并将所述目标检测框下沿的中心点作为被测物体在世界坐标系中对于地面的投影点p;步骤s2:通过标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标系位置;测量所述相机实际高度;输入相机成像几何关系模型计算所述相机和所述被测物体的垂直距离。2.根据权利要求1所述的基于相机成像几何关系的单目测距方法,其特征在于,所述步骤s2:通过标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标系位置;测量所述相机实际高度;输入相机成像几何关系模型计算所述相机和所述被测物体的垂直距离,具体包括:步骤s21:通过标定得到相机的焦距f以及相机成像面的像素中心点o1,o1坐标为(u0,v0);步骤s22:获取所述相机平面中心点o2对于地面的投影位置为o3;通过标定,得到所述相机的光轴在世界坐标系中与地面的交点m,计算m与相机平面的垂直距离o3m;步骤s23:根据测量得到所述相机的高度h、所述被测物体照片的像素尺寸δy和δx与相机焦距f,可得:相机焦距f,可得:其中,α为所述相机光轴与地面的夹角;β为所述相机光轴和点p在所述相机的成像光线的夹角;p1为p点在所述相机成像面所对应的纵坐标为v,f为相机的焦距,即o1和o2间距离,且o1o2垂直于所述相机成像面;步骤s24:计算所述相机与所述被测物体的垂直距离o3p:其中,γ为点p在所述相机的成像光线与地面的夹角。3.一种基于相机成像几何关系的单目测距系统,其特征在于,包括下述模块:获取被测物体模块,用于获取前视交通图像,输入目标检测网络,获取所述前视交通图像中的目标检测框,并提取出所述目标检测框下沿的中心点作为被测物体在世界坐标系中对于地面的投影点p;计算相机和被测物体距离模块,用于通过标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标系位置;测量所述相机实际高度;输入相机成像几何关系模型计算所述相机和所述被测物体的实际距离。
技术总结
本发明涉及一种基于相机成像几何关系的单目测距方法及系统,其方法包括:步骤S1:获取前视交通图像,输入目标检测网络,获取前视交通图像中的目标检测框,并将目标检测框下沿的中心点作为被测物体在世界坐标系中对于地面的投影点P;步骤S2:通过标定得到相机的焦距、相机成像面的像素中心点以及光轴在世界坐标系位置;测量相机实际高度;输入相机成像几何关系模型计算相机和被测物体的垂直距离。本发明提供的方法通过单目相机可直接对采集到的图像进行检测,并对待检测目标进行距离的测量,避免图像融合等步骤,还降低了造价,有利于其在智能车上得到推广应用。其在智能车上得到推广应用。其在智能车上得到推广应用。
技术研发人员:凌强 查易鑫 李峰 许永华
受保护的技术使用者:中国科学技术大学
技术研发日:2021.06.25
技术公布日:2021/10/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1