一种基于图信号处理的水下声源匹配场定位方法与流程
1.本发明属于信号处理领域,涉及匹配场处理、图信号处理、被动定位、声信号处理等理论,具体涉及一种基于图信号处理的水下声源匹配场定位方法。
技术背景
2.图信号处理(graph signal processing,gsp)是作为一种处理不规则领域上的大规模数据的工具,包括社交网络、交通网络、电网、免疫接种和流行病学网络,等等。有趣的是,gsp和经典信号处理之间的类似联系可以帮助人们理解gsp的核心思想——如图滤波器、图傅里叶变换、图频率、光谱分解等。gsp也非常适合在对传感器阵列上的复杂数据和相互作用进行建模和分析。
3.匹配的声场处理已被认为是定位水下声源的最成功的声学方法之一,一般来说,mfp可以看作是一个波束形成器,它将测量的数据与拷贝场字典相匹配,以定位源。由于mfp利用了传播信道的先验信息,特别是对于远距离问题,它比传统的几何定位方法具有更好的性能。然而,mfp也存在算力不足以及对模型失配敏感等缺点。
技术实现要素:
4.gsp和经典信号处理之间的类似联系可以帮助人们理解gsp的核心思想——如图滤波器、图傅里叶变换、图频率、光谱分解等。gsp也非常适合在对传感器阵列上的复杂数据和相互作用进行建模和分析。因此通过设计合适的图,或邻接矩阵,便可揭示内在的数据结构,这样gsp就可以用来估计到达方向(doa)。
5.基于上述,本发明只在于提供一种基于图信号处理的水下声源匹配场定位方法。采用的技术方案如下:
6.一种基于图信号处理的水下声源匹配场定位方法,所述方法包括以下步骤:
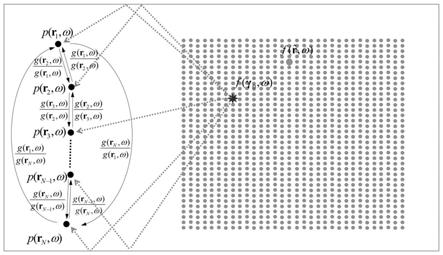
7.s1部署一个n元接收器阵列来记录压力场,则压力矢量作为其第n个元素表示为p(r
n
,ω),ω表示声源频率,r
n
表示接收阵元的位置;对于理想环境,p(ω)=f(γ0,ω)g(γ0,ω),其中g(γ0,ω)=[g(γ0,r1,ω),...,g(γ0,r
n
,ω)]表示格林函数的向量,υ0表示声源位置;
[0008]
s2两个不同的传感器压力场之间的关系可以表示为p(r
i
,ω)=β
i,j
p(r
j
,ω),其中
[0009]
s3在步骤s2的等式关系之上,为所接收到的压力场建立一个空间图的位移,即建立稀疏有向邻接矩阵立稀疏有向邻接矩阵表示测试点位置;
[0010]
s4将邻接矩阵特征分解为当测试点在正确的位置,即时,图傅里叶变换呈现一个one
‑
hot向量,其唯一的非
零项对应于特征向量t
u
(单位特征值)。
[0011]
需要说明的是,所述步骤s3中,采用的是稀疏有向邻接矩阵a(γ0,ω),其连接了每个传感器与其最近的邻向量;所建立的稀疏有向邻接矩阵为:
[0012][0013]
需要说明的是,对于测试点不匹配正确的位置,谱系数与one
‑
hot向量不匹配;其中one
‑
hot向量表示向量中只有一个值为1其余值为0的向量。
[0014]
本发明有益效果在于:基于计算出的格林函数建立了压力场的图位移矩阵,然后在压力场上进行图傅里叶变换来定位源。
[0015]
本发明与巴特利特处理器和最小方差处理器相比,图处理器不仅在理想环境中,而且在不匹配环境中表现良好。基于图形的mfp处理器由于其良好的精度和鲁棒性,可以在实际应用中有用。
附图说明
[0016]
图1是基于图的mfp在海洋波导中实现的示意图;
[0017]
图2是仿真验证环境进行匹配的现场处理;
[0018]
图3是图形处理器在理想环境下定位的结果。
具体实施例
[0019]
以下将结合附图对本发明作进一步的描述,需要说明的是,本实施例以本技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围并不限于本实施例。
[0020]
本发明为一种基于图信号处理的水下声源匹配场定位方法,所述方法包括以下步骤:
[0021]
s1部署一个n元接收器阵列来记录压力场,则压力矢量作为其第n个元素表示为p(r
n
,ω),ω表示声源频率,r
n
表示接收阵元的位置;对于理想环境,p(ω)=f(γ0,ω)g(γ0,ω),其中g(γ0,ω)=[g(γ0,r1,ω),...,g(γ0,r
n
,ω)]表示格林函数的向量,υ0表示声源位置;
[0022]
s2两个不同的传感器压力场之间的关系可以表示为p(r
i
,ω)=β
i,j
p(r
j
,ω),其中
[0023]
s3在步骤s2的等式关系之上,为所接收到的压力场建立一个空间图的位移,即建立稀疏有向邻接矩阵立稀疏有向邻接矩阵表示测试点位置;
[0024]
s4将邻接矩阵特征分解为当测试点在正确的位置,即时,图傅里叶变换呈现一个one
‑
hot向量,其唯一的非零项对应于特征向量t
u
(单位特征值)。
[0025]
需要说明的是,所述步骤s3中,采用的是稀疏有向邻接矩阵a(γ0,ω),其连接了每个传感器与其最近的邻向量;所建立的稀疏有向邻接矩阵为:
[0026][0027]
需要说明的是,对于测试点不匹配正确的位置,谱系数与one
‑
hot向量不匹配;其中one
‑
hot向量表示向量中只有一个值为1其余值为0的向量。
[0028]
验证:
[0029]
为了进一步验证本命的有效性,本发明设计代价函数以寻找声源位置。具体的说,设计了一个代价函数来评估测试点如何与真实位置的匹配,如下所示:
[0030][0031]
其中[e]_表示删除向量e中的最大绝对值。在此之后,我们可将称为图形处理器,与传统的mfp处理器相似,如图3所示,图处理器也达到了模糊曲面,其峰值揭示了正确的源位置。
[0032]
对于本领域的技术人员来说,可以根据以上的技术方案和构思,给出各种相应的改变,而所有的这些改变,都应该包括在本发明权利要求的保护范围之内。
技术特征:
1.一种基于图信号处理的水下声源匹配场定位方法,其特征在于,所述方法包括以下步骤:s1部署一个n元接收器阵列来记录压力场,则压力矢量作为其第n个元素表示为p(r
n
,ω),ω表示声源频率,r
n
表示接收阵元的位置;对于理想环境,p(ω)=f(γ0,ω)g(γ0,ω),其中g(γ0,ω)=[g(γ0,r1,ω),...,g(γ0,r
n
,ω)]表示格林函数的向量,υ0表示声源真实位置;s2两个不同的传感器压力场之间的关系可以表示为p(r
i
,ω)=β
i,j
p(r
j
,ω),其中s3在步骤s2的等式关系之上,为所接收到的压力场建立一个空间图的位移,即建立稀疏有向邻接矩阵疏有向邻接矩阵表示测试点位置;s4将邻接矩阵特征分解为当测试点在正确的位置,即时,图傅里叶变换呈现一个one
‑
hot向量,其唯一的非零项对应于特征向量t
u
(单位特征值)。2.根据权利要求1所述的基于图信号处理的水下声源匹配场定位方法,其特征在于,所述步骤s3中,采用的是稀疏有向邻接矩阵a(γ0,ω),其连接了每个传感器与其最近的邻向量;所建立的稀疏有向邻接矩阵为:3.根据权利要求1所述的基于图信号处理的水下声源匹配场定位方法,其特征在于,对于测试点不匹配正确的位置,谱系数与one
‑
hot向量不匹配;其中one
‑
hot向量表示向量中只有一个值为1其余值为0的向量。
技术总结
本发明公开了一种基于图信号处理的水下声源匹配场定位方法,具体的说,本发明将匹配场处理(MFP)方法与最近发展起来的方法——图信号处理(GSP)方法相结合。根据GSP的范式,为基于格林函数的任意分布式传感器构造了一个空间邻接矩阵,然后利用图傅里叶变换定位声源。根据仿真结果表明,基于图信号处理的MFP算法的精度优于传统的MFP处理器即巴特利特(Bartlett)处理器,鲁棒性优于最小方差(MV)处理器。理器。理器。
技术研发人员:肖鹏 杨昊璋 徐灵基 胡青
受保护的技术使用者:南方海洋科学与工程广东省实验室(珠海)
技术研发日:2021.07.27
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1