一种电缆隧道巡检机器人越障能力试验装置及测试方法
1.本发明涉及电力巡检机器人检测技术领域,具体涉及一种电缆隧道检测机器人的越障能力试验装置及测试方法。
背景技术:
2.定期对电缆隧道进行巡检,发现险情并及时进行处理是保证电缆隧道可靠运行的重要保障。早期国内对电力隧道的巡检主要采用人工方式,巡检过程中需要携带多种检测仪器,随着电力隧道长度的快速加长,人工巡检方式显得费时费力,造成了巡检效率低、间隔长,在巡检间隔期间产生隐患未能得到及时处理,增加了事故发生概率。电缆隧道巡检机器人能快速、有效发现隐患点,减小危险的发生。然而,电缆隧道巡检机器人在巡检过程中,需要跨越地面上的线缆或防护门等障碍物,因此需要对电缆隧道巡检机器人的越障能力进行测试。本发明提出了一种电缆隧道巡检机器人越障能力的测试装置以及测试方法,将为电缆隧道巡检机器人的越障能力提供检测平台,对促进我国的电力巡检机器人智能化水平的提高起到重要作用。
技术实现要素:
3.本发明的目的在于提供一种电缆隧道巡检机器人的越障能力测试装置及测试方法,能够对电缆隧道机器人在电缆隧道环境中的越障能力进行有效的测试和评价。
4.为实现上述目的,本发明所采用的技术方案是:
5.一种电缆隧道检测机器人越障能力试验装置,该测试装置包括:升降台本体、电机和控制系统,升降台本体设于低于地面的凹槽或坑井中,所述控制系统用于输出指令控制电机转动从而带动升降台本体升高或降落模拟地面高度起伏或障碍物。
6.所述升降台本体包括顶部平台、升降器,所述顶部平台水平设于升降器上方,电机转动带动升降器升起或降落预设高度。
7.所述升降器为螺旋升降器。
8.所述控制系统包括依次电性连接的pc机、plc、电机驱动器,所述pc机用于输出指令至plc,plc控制电机驱动器输出控制信号至电机。
9.所述该测试装置还包括摄像机,与pc机连接,所述摄像机设于升降台本体顶部,用于拍摄升降台本体上的视野发送给pc机进行显示。
10.所述plc与电机驱动器相连接,试验前将所需要测试的障碍物高度值输入到上位机软件中,通过软件程序计算出电机的相应转数来控制升降台的高度。
11.一种电缆隧道检测机器人越障能力试验方法,该方法是基于一种电缆隧道检测机器人越障能力试验装置实现的,包括如下步骤:
12.步骤1)在电缆隧道巡检机器人的巡检线路上设置该测试装置,控制测试装置升高或降落模模拟地面高度起伏或障碍物;
13.步骤2)控制电缆隧道巡检机器人在所述巡检线路上向着测试装置行走;
14.步骤3)控制拍摄机拍摄升降台本体上的巡检机器人越障图像视野发送给pc机,通过pc机显示画面观察电缆隧道巡检机器人是否成功跨域障碍高度。
15.所述设置障碍物为在电缆隧道巡检机器人的巡检线路上设置低于地面的凹槽或坑井。
16.所述测试装置为多个,设置在一段路线上,用于测试在该段路线上的连续越障。
17.本发明的优点与积极效果为:
18.1、本发明创新性的提出了针对电缆隧道检测机器人的越障能力测试装置及测试方法;
19.2、本发明可用于电缆隧道检测机器人的越障性能测试,该试验装置可以提供试验所需的任意障碍物高度;
20.3、本发明的测试方法简单、可靠、适合大面积推广。
附图说明
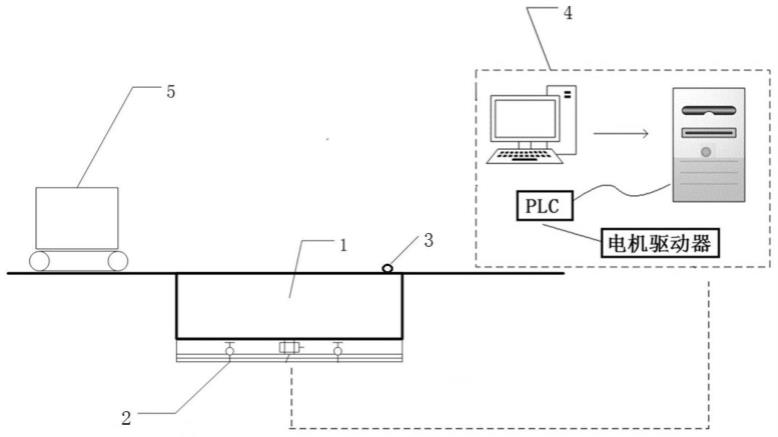
21.图1为本发明提供的一种电缆隧道检测机器人越障试验平台示意图;
22.图2为本发明提供的一种电缆隧道检测机器人越障试验平台原理图;
23.其中,图中:升降台本体1、顶部平台11、升降器12、电机2、摄像机3、控制系统4、上位pc机41、plc42、电机驱动器43、电缆隧道检测机器人5。
具体实施方式
24.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方法做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
25.除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
26.本发明提供一种电缆隧道检测机器人越障能力试验装置及测试方法。下面结合附图对本发明作进一步详述。
27.如图1-2所示。所述试验装置包括升降台本体1、电机2、摄像机3、控制系统4。其中升降台本体1包括顶部平台11、升降器12,升降台本体1位于地面以下的凹槽中,升降器12安装在顶部平台11下,顶部平台11与升降器3连接,升降器12由电机2驱动,可以正向或者反向转动驱动升降台本体1提高高度或降低高度用于模拟不同障碍物的高度。控制系统4包括上位pc机41、plc42、电机驱动器43。plc42与电机驱动器43相连接,试验前将所需要测试的障碍物高度值输入到上位机软件中,通过软件程序计算出电机的相应转数发送给plc42来控制升降台的高度。
28.升降器12为一种螺旋升降器,螺旋升降器包括箱体及内部蜗轮蜗杆、外露的轴承端和螺旋杆,螺旋升降器的轴承端与电机2的输出轴端连接,螺旋升降器的螺旋杆顶端与升降平台连接。利用电机2产生的动能驱动螺旋升降器的螺旋杆执行动作、上下移动,控制电机2的正反转从而控制螺旋升降器升降来满足平台升降。
29.利用上述试验装置进行电缆隧道检测机器人的越障能力测试,具体过程如下:
30.1)根据dl/t1636-2016《电缆隧道机器人巡检技术导则》要求,轮式或履带试机器人应能在行走过程中越到低于5cm的障碍物时自行跨越。因此在控制系统上位机界面输入电缆隧道机器人所需测试的越障高度为5cm。升降台本体1上升5cm,如图2所示。
31.2)电缆隧道检测机器人以一定的速度在巡检线路上行走,测试所述电缆隧道巡检机器人在行进过程中能否跨过5cm的升降台本体;
32.3)记录测试结果,完成所述电缆隧道巡检机器人的越障性能测试。
33.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。
技术特征:
1.一种电缆隧道检测机器人越障能力试验装置,其特征在于,该测试装置包括:升降台本体(1)、电机(2)和控制系统(4),升降台本体(1)设于低于地面的凹槽或坑井中,所述控制系统(4)用于输出指令控制电机(2)转动从而带动升降台本体(1)升高或降落模拟地面高度起伏或障碍物。2.根据权利要求1所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,所述升降台本体(1)包括顶部平台(11)、升降器(12),所述顶部平台(11)水平设于升降器(12)上方,电机(2)转动带动升降器(12)升起或降落预设高度。3.根据权利要求1所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,升降器(12)为螺旋升降器。4.根据权利要求1所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,所述控制系统(4)包括依次电性连接的pc机(41)、plc(42)、电机驱动器(43),所述pc机(41)用于输出指令至plc(42),plc(42)控制电机驱动器(43)输出控制信号至电机(2)。5.根据权利要求1所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,还包括摄像机(3),与pc机(41)连接,所述摄像机(3)设于升降台本体(1)顶部,用于拍摄升降台本体(1)上的视野发送给pc机(42)进行显示。6.根据权利要求1所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,所述plc与电机驱动器相连接,试验前将所需要测试的障碍物高度值输入到上位机软件中,通过软件程序计算出电机的相应转数来控制升降台的高度。7.根据权利要求1所述的一种电缆隧道检测机器人越障能力试验方法,该方法是基于一种电缆隧道检测机器人越障能力试验装置实现的,包括如下步骤:步骤1)在电缆隧道巡检机器人的巡检线路上设置该测试装置,控制测试装置升高或降落模模拟地面高度起伏或障碍物;步骤2)控制电缆隧道巡检机器人在所述巡检线路上向着测试装置行走;步骤3)控制拍摄机(3)拍摄升降台本体(1)上的巡检机器人越障图像视野发送给pc机(41),通过pc机(41)显示画面观察电缆隧道巡检机器人是否成功跨域障碍高度。8.根据权利要求7所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,所述设置障碍物为在电缆隧道巡检机器人的巡检线路上设置低于地面的凹槽或坑井。9.根据权利要求7所述的一种电缆隧道检测机器人越障能力试验装置,其特征在于,所述测试装置为多个,设置在一段路线上,用于测试在该段路线上的连续越障。
技术总结
本发明涉及一种电缆隧道巡检机器人的越障试验装置及越障能力测试方法,属于机器人检测技术领域。该巡检机器人越障测试装置包括顶部平台、升降器、电机、控制系统,该装置可以提供机器人越障能力试验中所需的任意障碍高度。本装置的测试方法用于对电缆隧道检测机器人的越障能力进行检测。本发明用于全面评价电缆隧道巡检机器人的越障性能,结构简单,操作方便,通用性强。通用性强。通用性强。
技术研发人员:刘佳鑫 李志海 李琳 吴镇炜 王忠 罗宇 李雪亮 董雪松 于洪鹏
受保护的技术使用者:中国科学院沈阳自动化研究所 国网山东省电力公司
技术研发日:2021.09.18
技术公布日:2023/3/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1