一种高压电缆DR检测用智能辅助装置及其应用方法与流程
一种高压电缆dr检测用智能辅助装置及其应用方法
技术领域
1.本发明属于电力工程技术领域,具体涉及一种高压电缆dr检测用智能辅助装置及其应用方法。
背景技术:
2.电力电缆是城市供电系统的主要设施。高压电力电缆结构复杂,从内到外由电缆芯线、内屏蔽、主绝缘、外屏蔽、阻水带、金属护套及外护套等多层结构组成,在运行中,人们通常无法用眼睛或常规的仪器设备检测到外护套包裹的内部结构的缺陷,如近年高压电缆行业频繁发生“阻水带~缓冲层~外屏蔽层”腐蚀放电缺陷,导致电缆本体发生绝缘击穿,严重影响到高压电缆系统的安全稳定运行。该缺陷类型涉及的电缆生产厂家多、设备批次多、在运设备多,仅某公司在2020年就有110千伏茶菊钢线和迎丁琼桔线等两起该类缺陷引起的主绝缘击穿故障,对电网的安全稳定运行和重要时段保电工作影响很大。
3.为解决上述缺陷检测问题,一种基于dr的检测技术被引入,经过技术的改进,已经实现对电缆本体缓冲层缺陷的有效检测。但因高压电缆线路数量众多,分布范围广,需要检测的检测点数很多,因此只有大范围推广使用该技术才能实现现场普测工作。
4.现有的测试操作方法是:在被检测点附近分别寻找信号发生器和信号采集器的摆放位置,然后通过绳子悬吊或物体支撑的方式,由两人协作分别将信号发生器和信号采集器固定好,然后连接好测试线再进行检测。采用现有的这种检测操作方法,检测过程中不能调整信号发生器和信号采集器的相对位置,仪器摆放位置误差大,检测效率很低,且存在设备损坏、人员被射线辐射等方面的安全隐患,因此尚不能满足大范围推广应用的条件。
技术实现要素:
5.本发明要解决的技术问题:针对现有技术的上述问题,针对dr检测技术在高压电缆类管道设备隐蔽缺陷的检测应用中存在效率低、安全风险高等问题,提供一种高压电缆dr检测用智能辅助装置及其应用方法,本发明可显著提升检测效率和检测智能化程度,提高检测工作的安全性,能对dr检测技术在电缆类管道设备的检测中普及应用发挥积极作用。
6.为了解决上述技术问题,本发明采用的技术方案为:
7.一种高压电缆dr检测用智能辅助装置,包括运动底盘、多轴协作机器臂组件和检测设备支架,所述检测设备支架通过多轴协作机器臂组件支承在运动底盘上,所述检测设备支架上设有相对布置的用于安装dr信号发生器的发生器安装位和用于安装信号采集器的采集器安装位。
8.可选地,所述多轴协作机器臂组件包括依次通过运动关节相连的第一机械臂、第二机械臂、第三机械臂,所述第一机械臂的下端固定在支承在运动底盘上、上端通过第一运动关节与第二机械臂的下端相连,所述第二机械臂的上端通过第二运动关节与第三机械臂的下端相连,所述第三机械臂的上端通过第三运动关节与检测设备支架相连。
9.可选地,所述发生器安装位安装有dr信号发生器。
10.可选地,所述采集器安装位安装有信号采集器。
11.可选地,所述采集器安装位朝向发生器安装位的一侧设有电缆定位部件。
12.可选地,所述电缆定位部件包括相对平行布置的两个定位板,两个定位板均水平布置,且靠近采集器安装位的一端固定在检测设备支架上。
13.可选地,所述运动底盘中设有相互连接的控制单元和电池模块,所述控制单元分别与第一运动关节、第二运动关节、第三运动关节以及运动底盘中行走机构的控制端相连,所述电池模块的输出端分别与控制单元、第一运动关节、第二运动关节、第三运动关节、dr信号发生器、信号采集器以及运动底盘中行走机构的电源端相连。
14.可选地,所述运动底盘为带有行走机构的小车,所述小车侧向安装有用于检测障碍物距离的距离传感器,所述距离传感器的输出端与控制单元相连。
15.此外,本发明还提供一种前述高压电缆dr检测用智能辅助装置的应用方法,包括:
16.1)控制运动底盘行驶到被检测高压电缆的下侧;
17.2)举升多轴协作机器臂组件,使得被检测高压电缆位于dr信号发生器、信号采集器之间的位置,继续控制运动底盘行驶,使得高压电缆嵌入到电缆定位部件间;
18.3)通过多轴协作机器臂组件控制检测设备支架以被检测高压电缆的轴线为中心转动以实现对被检测高压电缆进行多角度采集被检测高压电缆的dr图像。
19.可选地,步骤3)中通过多轴协作机器臂组件控制检测设备支架以被检测高压电缆的轴线为中心转动以实现对被检测高压电缆进行多角度采集被检测高压电缆的dr图像包括:
20.3.1)保持第一机械臂不动,以第一运动关节的轴心作为原点;
21.3.2)确定采集被检测高压电缆的dr图像的角度θ,该角度θ为第三运动关节的轴心相对原点的偏转角,基于下式确定第二机械臂的旋转角度α、第三机械臂的旋转角度β:
22.α=
±
arccos(r2+a
12-a
22
/2ra1)+θ
23.β=
±
arccos(r2+a
22-a
12
/2ra2)+θ-α
24.上式中,r为第三运动关节的轴心(x,y)到原点的距离,a1为第二机械臂的长度,a2为第三机械臂的长度;然后将第一运动关节转动到旋转角度α使得第二机械臂就位、将第二运动关节转动到旋转角度β使得第三机械臂就位,启动dr信号发生器并通过信号采集器采集被检测高压电缆的dr图像;
25.3.3)判断是否需要继续采集不同角度的被检测高压电缆的dr图像,如果需要则跳转至步骤3.2);否则,结束并退出。
26.和现有技术相比,本发明具有下述优点:
27.1、本发明高压电缆dr检测用智能辅助装置,包括运动底盘、多轴协作机器臂组件和检测设备支架,检测设备支架通过多轴协作机器臂组件支承在运动底盘上,检测设备支架上设有相对布置的用于安装dr信号发生器的发生器安装位和用于安装信号采集器的采集器安装位。针对dr检测技术在高压电缆类管道设备隐蔽缺陷的检测应用中存在效率低、安全风险高等问题,本发明可显著提升检测效率和检测智能化程度,提高检测工作的安全性,能对dr检测技术在电缆类管道设备的检测中普及应用发挥积极作用。
28.2、针对现有手工方法无法精确获得高压电缆同一部位的不同角度的dr图像的问
题,本发明采用检测设备支架通过多轴协作机器臂组件支承在运动底盘上,检测设备支架上设有相对布置的用于安装dr信号发生器的发生器安装位和用于安装信号采集器的采集器安装位,因此可利用多轴协作机器臂组件控制检测设备支架精确旋转,从而可精确获得高压电缆同一部位的不同角度的dr图像,以便于针对高压电缆内部缺陷的精确量化分析。
29.3、本发明可显著减少dr检测机位固定所耗时间,有效提升高压电缆dr检测的效率,降低dr检测工作的操作难度,极大的节约人力资源,同时还能显著的提高dr检测设备位置摆放的精确性,提升检测数据质量。
30.4、本发明可显著提高检测工作的安全性,包括有效防止检测设备在检测试验中跌落碰撞导致的损坏,有效防止x射线辐射对检测人员身体的潜在危害。
31.5、本发明的运动底盘、多轴协作机器臂组件和检测设备支架可根据需要采用可拆卸结构设计以方便运输和储存。
附图说明
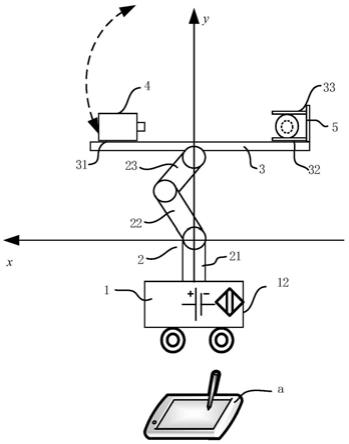
32.图1为本发明实施例装置的结构示意图。
33.图2为本发明实施例中多轴协作机器臂组件的控制原理示意图。
34.图例说明:1、运动底盘;2、多轴协作机器臂组件;21、第一机械臂;22、第二机械臂;23、第三机械臂;3、检测设备支架;31、发生器安装位;32、采集器安装位;33、电缆定位部件;4、dr信号发生器;5、信号采集器。
具体实施方式
35.如图1所示,本实施例高压电缆dr检测用智能辅助装置包括运动底盘1、多轴协作机器臂组件2和检测设备支架3,检测设备支架3通过多轴协作机器臂组件2支承在运动底盘1上,检测设备支架3上设有相对布置的用于安装dr信号发生器4的发生器安装位31和用于安装信号采集器5的采集器安装位32。针对dr检测技术在高压电缆类管道设备隐蔽缺陷的检测应用中存在效率低、安全风险高等问题,本发明可显著提升检测效率和检测智能化程度,提高检测工作的安全性,能对dr检测技术在电缆类管道设备的检测中普及应用发挥积极作用;针对现有手工方法无法精确获得高压电缆同一部位的不同角度的dr图像的问题,本实施例可利用多轴协作机器臂组件2控制检测设备支架3精确旋转,从而可精确获得高压电缆同一部位的不同角度的dr图像,以便于针对高压电缆内部缺陷的精确量化分析。
36.需要说明的是,多轴协作机器臂组件2可根据需要布置多段机器臂及多个运动关节,机器臂数量为3个及三个以上。在三个以上的情况时,根据检测空间的实际情况,两个关节之间的臂长可以灵活选择。
37.为了便于利用多轴协作机器臂组件2控制检测设备支架3精确旋转,精确获得高压电缆同一部位的不同角度的dr图像,以便于针对高压电缆内部缺陷的精确量化分析,如图1所示,本实施例中多轴协作机器臂组件2包括依次通过运动关节相连的第一机械臂21、第二机械臂22、第三机械臂23,第一机械臂21的下端固定在支承在运动底盘1上、上端通过第一运动关节与第二机械臂22的下端相连,第二机械臂22的上端通过第二运动关节与第三机械臂23的下端相连,第三机械臂23的上端通过第三运动关节与检测设备支架3相连。多轴协作机器臂组件2通过各个运动关节,可实现对第一机械臂21、第二机械臂22、第三机械臂23三
者的姿态调整,从而可调整dr信号发生器4和信号采集器5的位置,一方面调节dr信号发生器4和信号采集器5的相对位置,其次是dr信号发生器4和信号采集器5与被检测电缆的位置及角度,可调整信号采集器5的摆放高度,信号采集器5的摆放远近,及信号采集器5的角度,满足检测质量及检测速度要求。多轴协作机器臂组件2采用多关节自锁可拆卸结构设计,方便运输和储存。
38.本实施例中,第一机械臂21长度可为50~80cm,其与运动底盘1采用焊接的形式刚性连接,运动关节之间的臂长恒定,同时采用可拆卸结构设计,可以更换不同臂长的运动关节进行连接,可以在垂直方向上进行高度调节和角度调节。需要说明的是,运动关节为现有商用结构,本实施例中第一运动关节、第二运动关节以及第三运动关节均采用具有自锁功能的运动关节,其目标适用于在运动到位后自锁来维持位置的稳定,确保dr检测的稳定性。本实施例中,多轴协作机器臂组件2和运动底盘1之间采用自锁紧方式连接,在长途运输时多轴协作机器臂组件2和运动底盘1可分别装箱运输。
39.由于检测设备支架3上设有相对布置的用于安装dr信号发生器4的发生器安装位31和用于安装信号采集器5的采集器安装位32,可实现dr信号发生器4和信号采集器5的固定,提高检测效率和设备安全性能。
40.本实施例中,发生器安装位31安装有dr信号发生器4。作为一种可选的实施方式,本实施例中dr信号发生器4采用可拆卸的安装方式,此外也可以采用固定安装的方式。发生器安装位31和dr信号发生器4之间采用自锁紧方式连接,达到便于安装、拆卸作用,在长途运输时,实现本实施例装置、dr信号发生器4和信号采集器5三者的分离运输。
41.本实施例中,采集器安装位32安装有信号采集器5。作为一种可选的实施方式,本实施例中信号采集器5采用可拆卸的安装方式,此外也可以采用固定安装的方式。
42.为了便于利用多轴协作机器臂组件2控制检测设备支架3精确旋转,精确获得高压电缆同一部位的不同角度的dr图像,以便于针对高压电缆内部缺陷的精确量化分析,如图1所示,本实施例中采集器安装位32朝向发生器安装位31的一侧设有电缆定位部件33,用于将电缆定位部件33固定在电缆上,可实现dr信号发生器4和信号采集器5以卡紧段为圆心,作圆弧状旋转,以此调节拍摄角度。
43.如图1所示,本实施例中电缆定位部件33包括相对平行布置的两个定位板,两个定位板均水平布置,且靠近采集器安装位32的一端固定在检测设备支架3上。
44.为提升运动底盘1的承重能力,运动底盘1采用金属材质构造。本实施例中,运动底盘1中设有相互连接的控制单元和电池模块,控制单元分别与第一运动关节、第二运动关节、第三运动关节以及运动底盘1中行走机构的控制端相连,电池模块的输出端分别与控制单元、第一运动关节、第二运动关节、第三运动关节、dr信号发生器4、信号采集器5以及运动底盘1中行走机构的电源端相连。电池模块采用电池供电,使用中无需外接市电,可用于给控制单元、第一运动关节、第二运动关节、第三运动关节、dr信号发生器4、信号采集器5以及运动底盘1中行走机构供电,此外还为设备之间的相互通讯、照明提供电源。本实施例中,电池模块采用大容量锂电电池,电池容量≥5kw,现场可更换,可配备一块以上的备用电池。
45.本实施例中,运动底盘1为带有行走机构的小车,小车侧向安装有用于检测障碍物距离的距离传感器,距离传感器的输出端与控制单元相连。当距离传感器检测到人或障碍物时,控制单元会自动发出告警信息,提醒操作人员保持检测安全距离;在距离不满足要求
时,闭锁dr信号发生器4的操作功能,从而不产生x射线,保证对检测人员的人身安全。在较大距离移动时,控制单元1控制多轴协作机器臂组件2向运动底盘1收拢,使其保持较小的占用空间和较低的重心,以方便在狭小的空间稳定通行。本实施例中,距离传感器的检测灵敏度≥10cm。
46.本实施例中,行走机构具体为车轮式行走机构,通过行走电机驱动车轮行走,能够前后运动,也能够横向运动,具有一定的越障能力,在运动中能够自动保持平衡,稳定性好;运动底盘具有车轮闭锁功能,确保在检测时,车轮闭锁,运动底盘能够保持相对静止(稳定)。此外,运动底盘1也可以根据需要采用履带式行走机构。
47.本实施例中,控制单元包括数据采集模块、微处理器、驱动电路和通讯模块,微处理器通过驱动电路分别与第一运动关节、第二运动关节、第三运动关节以及dr信号发生器4相连,用于驱动第一运动关节、第二运动关节、第三运动关节转动,以及dr信号发生器4的工作状态控制;信号采集器5则通过数据采集模块与微处理器相连,用于采集dr信号(x光)经过电缆后在信号采集器5上的成像信息,微处理器和通讯模块相连,用于实现与本实施例高压电缆dr检测用智能辅助装置的远程通讯和控制。
48.如图1所示,作为一种可选的实施方式,本实施例中通讯模块采用无线通讯模块,通讯模块通过无线网络与一作为控制端的遥控平板系统(如图1中a所示)相连,操作人员从遥控平板系统发送的指令,可实现与本实施例高压电缆dr检测用智能辅助装置的远程通讯和控制,包括控制运动底盘1、多轴协作机器臂组件2、dr信号发生器4以及信号采集器5,以便将dr信号发生器4以及信号采集器5摆放就位;运动底盘1根据操作人员从遥控平板发送的指令,将多轴协作机器臂组件2送至指定的检测点位。遥控平板系统具备com端口、rs485等多种数据接入功能,及视频、图像等数据的处理分析功能,同时装载dr信号发生器4、信号采集器5的控制软件,以及运动关节控制软件。
49.本实施例高压电缆dr检测用智能辅助装置在去现场检测前,需要检查本实施例装置的主体部分、dr信号发生器4以及信号采集器5的完整性、可用性,保持电池模块电量充足、备用电池电量充足;到现场检测点位,依次给运动底盘1装配好电池模块,将多轴协作机器臂组件2安装在运动底盘1上,再将dr信号发生器4以及信号采集器5安装在多轴协作机器臂组件2顶部的检测设备支架3上,连接好信号、电源线路,启动遥控平板系统测试运动底盘1运行情况、多轴协作机器臂组件2的活动情况、dr信号发生器4以及信号采集器5的工作情况,检查信号和电源等的完好性。
50.在准备工作完成后,开始按照作业要求开展现场检测工作,通过操作遥控平板系统,控制本实施例的智能辅助装置,将dr信号发生器4以及信号采集器5送至指定位置,启动dr测试,由dr信号发生器4产生x射线,由信号采集器5接收x射线透过被检测电缆后信号并实现成像输出,检测结果通过无线的方式传输至操作遥控平板系统,然后进行后台处理和存储,并关闭dr信号发生器4的发出的x射线信号;然后,通过操作遥控平板系统控制本实施例的智能辅助装置,调整各个运动关节运动,从而调整dr信号发生器4以及信号采集器5的位置,形成新的检测角度,再启动dr测试重新进行检测,得到第二个测试数据,并回传至操作遥控平板系统;如果根据检测方案,需要在同一个检测点检测三个以上的数据,也可重复上述步骤继续开展检测。若是这个检测点的检测工作已经完成,则控制运动底盘1移动,转移至下一个检测点,重复上述步骤进行检测;若是移动距离较远,可将多轴协作机器臂组件
2向运动底盘收拢,使其保持较小的占用空间和较低的重心,以方便在狭小的空间稳定通行;若是全部检测工作都已经完成,则可将dr信号发生器4以及信号采集器5、多轴协作机器臂组件2、运动底盘1等分别拆开,装入防护箱以备运输。
51.此外,本实施例还提供一种前述高压电缆dr检测用智能辅助装置的应用方法,包括:
52.1)控制运动底盘1行驶到被检测高压电缆的下侧;
53.2)举升多轴协作机器臂组件2,使得被检测高压电缆位于dr信号发生器4、信号采集器5之间的位置,继续控制运动底盘1行驶,使得高压电缆嵌入到电缆定位部件33间;
54.3)通过多轴协作机器臂组件2控制检测设备支架3以被检测高压电缆的轴线为中心转动以实现对被检测高压电缆进行多角度采集被检测高压电缆的dr图像。
55.为了便于利用多轴协作机器臂组件2控制检测设备支架3精确旋转,精确获得高压电缆同一部位的不同角度的dr图像,以便于针对高压电缆内部缺陷的精确量化分析,如图2所示,步骤3)中通过多轴协作机器臂组件2控制检测设备支架3以被检测高压电缆的轴线为中心转动以实现对被检测高压电缆进行多角度采集被检测高压电缆的dr图像包括:
56.3.1)保持第一机械臂21不动,以第一运动关节的轴心作为原点;
57.3.2)确定采集被检测高压电缆的dr图像的角度θ,该角度θ为第三运动关节的轴心相对原点的偏转角,基于下式确定第二机械臂22的旋转角度α、第三机械臂23的旋转角度β:
58.α=
±
arccos(r2+a
12-a
22
/2ra1)+θ
59.β=
±
arccos(r2+a
22-a
12
/2ra2)+θ-α
60.上式中,r为第三运动关节的轴心(x,y)到原点的距离,a1为第二机械臂22的长度,a2为第三机械臂23的长度;然后将第一运动关节转动到旋转角度α使得第二机械臂22就位、将第二运动关节转动到旋转角度β使得第三机械臂23就位,启动dr信号发生器4并通过信号采集器5采集被检测高压电缆的dr图像;
61.3.3)判断是否需要继续采集不同角度的被检测高压电缆的dr图像,如果需要则跳转至步骤3.2);否则,结束并退出。
62.由于刚性连接,dr信号发生器4和信号采集器5的运动轨迹与支点(第三运动关节的轴心)的运动轨迹都作圆弧状,且确定支点的运动轨迹时,dr信号发生器4和信号采集器5的运动轨迹也确定了;dr信号发生器4和信号采集器5的运动是由第二机械臂22、第三机械臂23旋转一定的角度来带动的。dr信号发生器4和信号采集器5和支点作圆弧状运动时,对应的第二机械臂22、第三机械臂23的运动轨迹可以通过旋转角度来描述其运动轨迹。
63.如图2所示,在以第一运动关节的轴心作为原点的极坐标系中,有以下固定值:当dr信号发生器4作圆弧状运动时,由于刚性连接,支点(第三运动关节的轴心)也作圆弧状运动,支点(第三运动关节的轴心)与坐标为(x1,y1)的电缆定位部件33的距离为l,第二机械臂22、第三机械臂23的长度分别为a1,a2;当支点(第三运动关节的轴心)坐标为(x,y),其与原点的角度为θ,需要确定第二机械臂22的旋转角度α和第三机械臂23的旋转角度β来确定两个臂的运动轨迹,推导过程如下:
64.支点(第三运动关节的轴心)的坐标描述:x=rcosθ,y=r,x2+y2=r2;
65.电缆定位部件33的坐标描述:(rcosθ-x1)2+(rsinθ-y1)2=l2;
66.且:x-a1cosα=a2cos(α+β),y-a1sinα=a2sin(α+β);
67.取平方相加则有:x2+y2+a
12-2a1(xcosα+ysinα)=a2,代入x,y可得:
68.r2+a
12-2ra1(cosαcosθ+sinαrsinθ)=a
22
69.可得r2+a
12-a
22
=2ra1(cosα-θ)、α=
±
arccos(r2+a
12-a
22
/2ra1)+θ
70.根据对称性原理,α+β=
±
arccos(r2+a
22-a
12
/2ra2)+θ,可得:
71.β=
±
arccos(r2+a
22-a
12
/2ra2)+θ-α
72.因此,当确定第三运动关节的轴心相对原点的偏转角的角度为θ时,可推导得出第二机械臂22的旋转角度α和第三机械臂23的旋转角度β。
73.综上所述,本实施例高压电缆dr检测用智能辅助装置能够显著减少dr检测机位固定所耗时间,有效提升高压电缆dr检测的效率,降低dr检测工作的操作难度,极大的节约人力资源,有效防止检测设备在检测试验中跌落碰撞导致的损坏,同时还能显著的提高dr检测设备位置摆放的精确性,提升检测数据质量。本实施例高压电缆dr检测用智能辅助装置具备位移检测功能,可显著提高检测工作的安全性,有效防止x射线辐射对检测人员身体的潜在危害。本发明所述智能辅助装置,采用可拆卸结构设计,方便运输和储存。
74.本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
75.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1