一种基于MEMS陀螺寻北仪的二位置平滑精准寻北方法与流程
本发明涉及陀螺寻北仪的寻北方法,特别是一种mems陀螺寻北仪的二位置平滑精准寻北方法。
背景技术:
1、定向技术有着广泛的应用领域,不仅在导弹、火箭和火炮的发射,飞机、坦克和舰船的航行都离不开方位基准,而且在地球物理探测、矿产资源开采、大地测量和隧道建设等民用领域也需要方位记住。定向技术的研究与产品开发,对国防现代化、国民经济发展具有重要意义。其中,矿产资源开采所用的随钻系统的钻井测斜仪就是定向技术的典型应用。由于陀螺仪应用于钻井测斜仪时,相对于磁通门方位传感器而言,不受磁场环境的影响,具备更高可靠性,是当前主要的井下测斜寻北仪。
2、目前基于mems陀螺仪的井下测斜寻北仪正逐步被国内外研究机构进行开发研究和应用。其相比于光纤陀螺和动力调谐陀螺而言,具备低成本、低功耗、小型化、高可靠以及抗冲击振动等优势,将成为未来随钻系统中的主流钻井测斜仪产品。虽然目前mems陀螺仪可通过阵列配置方式有效提升其测量精度,满足一定的寻北精度要求,但现有基于mems陀螺仪的多位置寻北精度仍受到mems陀螺仪性能制约。在mems陀螺仪自身测量精度固定情况下,为了满足更高精度的随钻系统寻北精度需求,本发明提出一种基于mems陀螺寻北仪的二位置平滑精准寻北方法。
技术实现思路
1、本发明要解决的技术问题就在于:针对mems陀螺仪寻北精度与mems陀螺仪性能直接相关,在mems陀螺仪性能固定时,寻北精度无法有效提升的技术瓶颈问题。
2、为解决上述技术问题,本发明提出的技术方案为:一种基于mems陀螺寻北仪的二位置平滑精准寻北方法,包括如下步骤:
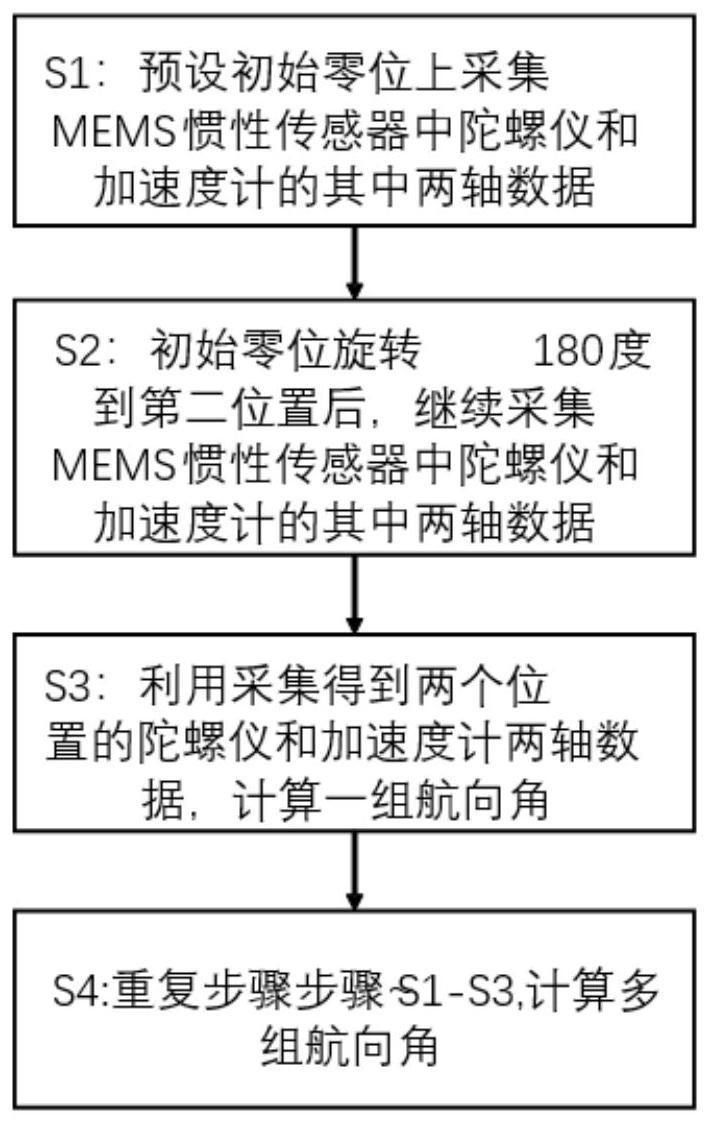
3、s1.将mems惯性传感器寻北仪在预设的初始零位静止设定的采样时长,存储三轴mems陀螺的其中两轴数据和mems加速度计的其中两轴数据;利用自动旋转机构将mems陀螺寻北仪从初始零位旋转180度后到第二位置,继续静止采集预设时长的mems陀螺仪数据和mems加速度计数据,存储与预设零位相同的两轴数据;
4、s2.利用所述初始零位和所述第二位置的一段时长的两轴mems陀螺仪数据和mems加速度计数据,求解一组航向角,即寻北结果,并进行存储;
5、s3.继续所述步骤s1中初始零位静止的mems陀螺仪和mems加速度计预设固定采样时长的采集,并存储与所述步骤s1中陀螺仪和加速度计相同的两个轴的数据,然后继续旋转180度到第二位置后,采集预设时长的两轴陀螺仪数据和加速度计数据。再利用步骤s2求解另一组寻北结果;
6、s4.重复所述步骤s3求解多组寻北结果,对多组结果直利用所述初始零位和所述第二位置的一段时长的两轴mems陀螺仪数据和mems加速度计数据,求解一组航向角,即寻北结果,并进行存储接做平滑处理,得到最终寻北结果。
7、进一步地,所述步骤s1中,所述三轴mems陀螺和mems加速度计的其中两轴数据,其中选择的一个轴与寻北仪共轴,另一轴垂直于寻北仪轴向。所述的采集预设时长数据,该时长与mems陀螺仪采集频率相关。
8、进一步地,所述步骤s2中第一组寻北结果记为的计算方法,包括:
9、s21.初始零位上mems陀螺仪存储的数据在载体坐标系中的投影为:
10、
11、其中ωb(1)为mems陀螺仪在初始零位输出,上标b表示载体坐标系,存储的其中两轴数据分别记为为地球自转角速度在导航坐标系n的北向投影,为地球自转角速度在导航坐标系n的天向投影,εb为陀螺仪敏感的三轴零偏,k为刻度因子矩阵,为初始零位导航坐标系n到载体坐标系b的姿态转移矩阵,其表达式如下所示:
12、
13、则存储的两轴陀螺仪数据展开式为:
14、
15、同理可得初始零位mems加速度计中存储的两轴数据,记为
16、其表达式为:
17、
18、其中g为重力加速度数值,和为加速度计两轴的零偏;
19、s22.从初始零位旋转180度后到第二位置上,mems陀螺仪在载体坐标系中进行投影后存储的两轴陀螺仪数据展开式为:
20、
21、同理第二位置上mems加速度计中存储的两轴数据,记为其表达式为:
22、
23、s23.利用式(4)和式(6)计算出两个位置处的横滚角γ和俯仰角θ;
24、s24.将式(3)与式(5)相减后可以得到下式:
25、
26、利用式(7)可消除刻度系数因子k,并求解得到将其记为第一组的寻北结果
27、进一步地,所述步骤s2中,利用所述初始零位和所述第二位置的一段时长的两轴mems陀螺仪数据,在空间中相当于采集了四个位置的角速率数据,能有效消除mems陀螺仪零偏、刻度因子误差对寻北结果的影响。
28、进一步地,所述步骤s2寻北结果的求解,与所述步骤s3旋转结构转动陀螺仪静置采集数据的过程时不间断连续执行。
29、进一步地,所述步骤s4中,多组寻北结果的误差呈白噪声形式,平滑处理为直接对多组结果进行求和平均,可得最终寻北结果相对于单组寻北结果能将寻北误差降低为其中σ为单组寻北误差,n为寻北结果组数。
30、与现有技术相比,本发明的优点在于:
31、本发明在mems陀螺仪性能一定的情况下,可以通过本方法实现寻北精度的成倍提升,有效突破因mems陀螺仪性能而限制寻北精度的瓶颈问题,提升寻北仪对于复杂井下环境的适应性。
技术特征:
1.一种基于mems陀螺寻北仪的二位置精准寻北方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的基于mems陀螺寻北仪的二位置精准寻北方法,所述步骤s1中,所述三轴mems陀螺和mems加速度计的其中两轴数据,其中选择的一个轴与寻北仪共轴,另一轴垂直于寻北仪轴向。所述的采集预设时长数据,该时长与mems陀螺仪采集频率相关。
3.根据权利要求1所述的基于mems惯性传感器寻北仪的二位置精准寻北方法,其特征在于:所述步骤s2中第一组寻北结果记为的计算方法,包括:
4.根据权利要求1所述的基于mems陀螺寻北仪的二位置精准寻北方法,其特征在于:所述步骤s2中,利用所述初始零位和所述第二位置的一段时长的两轴mems陀螺仪数据,在空间中相当于采集了四个位置的角速率数据,能有效消除mems陀螺仪零偏、刻度因子误差对寻北结果的影响。
5.根据权利要求1所述的基于mems陀螺寻北仪的二位置精准寻北方法,其特征在于:所述步骤s2寻北结果的求解,与所述步骤s3旋转结构转动陀螺仪静置采集数据的过程时不间断连续执行。
6.根据权利要求1所述的基于mems陀螺寻北仪的二位置精准寻北方法,其特征在于:所述步骤s4中,多组寻北结果的误差呈白噪声形式,平滑处理为直接对多组结果进行求和平均,可得最终寻北结果相对于单组寻北结果能将寻北误差降低为其中σ为单组寻北误差,n为寻北结果组数。
技术总结
本发明涉及测绘领域,尤其涉及一种基于MEMS陀螺寻北仪的二位置精准寻北方法,所述方法包括步骤:S1,将MEMS寻北仪在预设的初始零位静止设定采样时长,存储MEMS的两轴数据;将MEMS寻北仪从初始零位旋转到第二位置,继续采集并存储相关数据;S2.利用S1采集的数据,求解并存储一组航向角;S3.继续步骤S1和S2,求解另一组寻北结果;S4.重复步骤S3求解多组寻北结果,并做平滑处理得到最终寻北结果。采用本发明的寻北方法,可以在MEMS陀螺仪性能一定的情况下,提高寻北精度升,提升寻北仪对于复杂井下环境的适应性。
技术研发人员:杭义军,吕印新,贾文峰
受保护的技术使用者:原极(上海)科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!