一种基于雷达探测的管道机器人的制作方法
1.本发明属于管道机器人领域,尤其涉及一种基于雷达探测的管道机器人。
背景技术:
2.目前的管道机器人在管道内对管道进行探测时,难以在管道内对其探测部进行调整而导致其探测适应性低,且探测灵敏度低。
技术实现要素:
3.为了解决上述技术问题,本发明的目的在于提供一种结构简单,且基于雷达可灵活对管道内进行探测的管道机器人。
4.为了实现上述目的,本发明的技术方案如下:一种基于雷达探测的管道机器人,包括机器人本体、升降机构、旋转扫描机构和地质雷达,所述升降机构安装在所述机器人本体的上端,所述旋转扫描机构安装在所述升降机构的升降端,所述旋转扫描机构的驱动端朝前,所述地质雷达通过调节组件安装在所述旋转扫描机构的驱动端,所述调节组件用以调节所述地质雷达至所述旋转扫描机构驱动端的间距,所述旋转扫描机构带动所述地质雷达旋转并与所述地质雷达协同对管道进行探测。
5.上述技术方案的有益效果在于:如此可由机器人本体带动升降机构、旋转扫描机构和地质雷达在管道内移动,同时由升降机构调节旋转扫描机构和高度,并由调节组件调节地质雷达相对于旋转套旋转轨迹的半径,从而使得地质雷达可在管道内呈圆形移动而对管道进行周向扫描,同时由旋转扫描机构在管道内进行环向探测。
6.上述技术方案中所述旋转扫描机构包括驱动组件、旋转套和探测总成,所述驱动组件的驱动端水平朝前,所述旋转套同轴固定安装在所述驱动组件的驱动端,所述探测总成安装在所述旋转套上。
7.上述技术方案的有益效果在于:其结构简单,且转动方便,且探测总成可对管道内进行环向检测。
8.上述技术方案中所述驱动组件包括驱动电机和减速装置,所述减速装置的动力输出端水平朝前并构成所述驱动组件的驱动端,所述驱动电机安装在所述减速装置上,且其驱动端与所述减速装置的动力输入端传动连接。
9.上述技术方案的有益效果在于:其结构简单,且减速装置的驱动端运行稳定。
10.上述技术方案中还包括置于所述旋转套内的空心轴式编码器,所述空心轴式编码器包括编码器本体和空心轴,所述编码器本体固定安装在所述减速装置上,且所述空心轴同轴固定安装在所述减速装置的动力输出端。
11.上述技术方案的有益效果在于:如此可由空心轴式编码器对减速装置的动力输出端的转速和角位移进行监测。
12.上述技术方案中所述减速装置为蜗轮蜗杆式减速机。
13.上述技术方案的有益效果在于:其结构简单。
14.上述技术方案中所述探测总成包括摄像头、三维轮廓仪、激光测距探头和照明灯中的至少一种。
15.上述技术方案的有益效果在于:所述摄像头用以对管道内的进行摄像或拍照以直观的了解管道内的实际情况,而三维轮廓仪用以对管道内是否存在缺损进行探测,而激光测距探头用以测量旋转套至管道内壁之间的间距,而照明灯用以用以在管道内进行照明以仪便于摄像头进行拍摄。
16.上述技术方案中所述升降机构和调节组件均为电动式双剪式升降平台。
17.上述技术方案的有益效果在于:其结构简单,且调节方便。
18.上述技术方案中所述机器人本体为履带式机器人底盘或轮式机器人底盘。
19.上述技术方案的有益效果在于:其结构简单,且在管道内移动性能佳。
附图说明
20.图1为本发明实施例所述的基于雷达探测的管道机器人的结构简图;
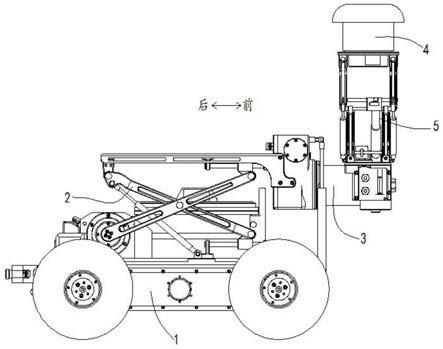
21.图2为本发明实施例所述的基于雷达探测的管道机器人的立视图;
22.图3为本发明实施例所述的旋转扫描机构的剖视图;
23.图4为本发明实施例所述驱动组件的剖面图。
24.图中:1机器人本体、2升降机构、3旋转扫描机构、31驱动组件、311驱动电机、312减速装置、32旋转套、33探测总成、331摄像头、332三维轮廓仪、333激光测距探头、334照明灯、34空心轴式编码器、341编码器本体、342空心轴、4地质雷达、5调节组件。
具体实施方式
25.以下结合附图对本发明的原理和特征进行描述,所举实施例只用于解释本发明,并非用于限定本发明的范围。
26.如图1-图2所示,本实施例提供了一种基于雷达探测的管道机器人,包括机器人本体1、升降机构2、旋转扫描机构3和地质雷达4,所述升降机构2安装在所述机器人本体1的上端,所述旋转扫描机构3安装在所述升降机构2的升降端,所述旋转扫描机构3的驱动端朝前,所述地质雷达4通过调节组件5安装在所述旋转扫描机构3的驱动端,所述调节组件5用以调节所述地质雷达4至所述旋转扫描机构3驱动端的间距,所述旋转扫描机构3带动所述地质雷达4旋转并与所述地质雷达4协同对管道进行探测,如此可由机器人本体带动升降机构、旋转扫描机构和地质雷达在管道内移动,同时由升降机构调节旋转扫描机构和高度,并由调节组件调节地质雷达相对于旋转套旋转轨迹的半径,从而使得地质雷达可在管道内呈圆形移动而对管道进行周向扫描,同时由旋转扫描机构在管道内进行环向探测。
27.如图3和图4所示,上述技术方案中所述旋转扫描机构3包括驱动组件31、旋转套32和探测总成33,所述驱动组件31的驱动端水平朝前,所述旋转套32同轴固定安装在所述驱动组件31的驱动端,所述探测总成33安装在所述旋转套32上,其结构简单,且转动方便,且探测总成可对管道内进行环向检测。
28.上述技术方案中所述驱动组件31包括驱动电机311和减速装置312,所述减速装置312的动力输出端水平朝前并构成所述驱动组件31的驱动端,所述驱动电机311安装在所述减速装置312上,且其驱动端与所述减速装置312的动力输入端传动连接,其结构简单,且减
速装置的驱动端运行稳定。
29.上述技术方案中还包括置于所述旋转套32内的空心轴式编码器34,所述空心轴式编码器34包括编码器本体341和空心轴342,所述编码器本体341固定安装在所述减速装置312上,且所述空心轴342同轴固定安装在所述减速装置312的动力输出端,如此可由空心轴式编码器对减速装置的动力输出端的转速和角位移进行监测。
30.上述技术方案中所述减速装置312为蜗轮蜗杆式减速机,其结构简单。
31.上述技术方案中所述探测总成33包括摄像头331、三维轮廓仪332、激光测距探头333和照明灯334中的至少一种,所述摄像头用以对管道内的进行摄像或拍照以直观的了解管道内的实际情况,而三维轮廓仪用以对管道内是否存在缺损进行探测,而激光测距探头用以测量旋转套至管道内壁之间的间距,而照明灯用以用以在管道内进行照明以仪便于摄像头进行拍摄。
32.上述技术方案中所述升降机构2和调节组件5均为电动式双剪式升降平台,其结构简单,且调节方便。
33.上述技术方案中所述机器人本体1为履带式机器人底盘或轮式机器人底盘,其结构简单,且在管道内移动性能佳。
34.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于雷达探测的管道机器人,其特征在于,包括机器人本体(1)、升降机构(2)、旋转扫描机构(3)和地质雷达(4),所述升降机构(2)安装在所述机器人本体(1)的上端,所述旋转扫描机构(3)安装在所述升降机构(2)的升降端,所述旋转扫描机构(3)的驱动端朝前,所述地质雷达(4)通过调节组件(5)安装在所述旋转扫描机构(3)的驱动端,所述调节组件(5)用以调节所述地质雷达(4)至所述旋转扫描机构(3)驱动端的间距,所述旋转扫描机构(3)带动所述地质雷达(4)旋转并与所述地质雷达(4)协同对管道进行探测。2.根据权利要求1所述的基于雷达探测的管道机器人,其特征在于,所述旋转扫描机构(3)包括驱动组件(31)、旋转套(32)和探测总成(33),所述驱动组件(31)的驱动端水平朝前,所述旋转套(32)同轴固定安装在所述驱动组件(31)的驱动端,所述探测总成(33)安装在所述旋转套(32)上。3.根据权利要求2所述的基于雷达探测的管道机器人,其特征在于,所述驱动组件(31)包括驱动电机(311)和减速装置(312),所述减速装置(312)的动力输出端水平朝前并构成所述驱动组件(31)的驱动端,所述驱动电机(311)安装在所述减速装置(312)上,且其驱动端与所述减速装置(312)的动力输入端传动连接。4.根据权利要求3所述的基于雷达探测的管道机器人,其特征在于,还包括置于所述旋转套(32)内的空心轴式编码器(34),所述空心轴式编码器(34)包括编码器本体(341)和空心轴(342),所述编码器本体(341)固定安装在所述减速装置(312)上,且所述空心轴(342)同轴固定安装在所述减速装置(312)的动力输出端。5.根据权利要求4所述的基于雷达探测的管道机器人,其特征在于,所述减速装置(312)为蜗轮蜗杆式减速机。6.根据权利要求5所述的基于雷达探测的管道机器人,其特征在于,所述探测总成(33)包括摄像头(331)、三维轮廓仪(332)、激光测距探头(333)和照明灯(334)中的至少一种。7.根据权利要求1-6任一项所述的基于雷达探测的管道机器人,其特征在于,所述升降机构(2)和调节组件(5)均为电动式双剪式升降平台。8.根据权利要求1-6任一项所述的基于雷达探测的管道机器人,其特征在于,所述机器人本体(1)为履带式机器人底盘或轮式机器人底盘。
技术总结
本发明公开了一种基于雷达探测的管道机器人,包括机器人本体、升降机构、旋转扫描机构和地质雷达,升降机构安装在机器人本体的上端,旋转扫描机构安装在升降机构的升降端,旋转扫描机构的驱动端朝前,地质雷达通过调节组件安装在旋转扫描机构的驱动端,调节组件用以调节地质雷达至旋转扫描机构驱动端的间距,旋转扫描机构带动地质雷达旋转并与地质雷达协同对管道进行探测,如此可由机器人本体带动升降机构、旋转扫描机构和地质雷达在管道内移动,同时由升降机构调节旋转扫描机构和高度,由调节组件调节地质雷达相对于旋转套旋转轨迹的半径,从而使得地质雷达可在管道内呈圆形移动而对管道进行周向扫描,同时由旋转扫描机构在管道内进行环向探测。构在管道内进行环向探测。构在管道内进行环向探测。
技术研发人员:郑洪标 刘志国 黄勇 龚文俊 施鹏飞 邓燕
受保护的技术使用者:武汉中仪物联技术股份有限公司
技术研发日:2021.10.22
技术公布日:2022/2/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1