一种基于车载单目摄像机的行人距离测量方法
1.本发明涉及深度学习卷积神经网络等技术领域,尤其涉及一种基于darknet框架的yolov4行人检测算法的测距方法。
背景技术:
2.在行人检测及测距等道路环境感知中,摄像头具有信息丰富、成本低等优势,在高级驾驶辅助系统及未来无人驾驶的实现中,基于摄像头的行人测距将是一项关键技术。目前应用于汽车测距的方式主要有以下几种:激光测距、超声测距、微波测距、红外线测距、视觉测距。其中,超声测距与红外线测距仪因其探测距离较短,主要应用于汽车倒车控制系统;而激光和微波雷达测距仪因其具有测量距离远、精度高等优点,常被应用于车辆主动安全控制系统,但其产品规格大,测距越远成本越高。视觉测量技术在精度、速度、智能化等方面具有很强的适应性,并具有高精度、稳定性好、非接触性测量等特点,若再结合图像处理技术,即可构成自动化较高的实用测距系统,因此它在智能车辆辅助驾驶导航的安全距离测量中应用极广。
技术实现要素:
3.本发明设计了一种基于车载单目摄像机的行人距离测量方法。车载相机行人距离测量的核心是对行人的准确检测,利用yolov4算法实时检测车辆前方道路环境中的行人,即可得到行人在像素坐标系中的位置,再将像素坐标系中行人和相机的像素坐标通过opencv标定转换为世界坐标系中行人和相机的世界坐标,并通过计算这两点之间的距离即可得到行人与汽车之间的距离。
4.本发明通过以下技术方案实现:
5.1.一种基于车载单目摄像机的行人距离测量方法,其特征在于,所述测距方法包括以下步骤:
6.步骤1:相机标定,得到相机的内参和外参;
7.步骤2:视频图像采集并制作voc格式的数据集;
8.步骤3:利用制作的数据集训练模型并测试;
9.步骤4:通过标定计算车与行人的距离。
10.2.根据权利要求1所述测距方法,其特征在于,所述步骤1制作数据集具体为,
11.步骤1.1:将标定板摆放在平地上,用相机多角度进行拍摄并得到20张左右照片,通过opencv标定即可得到相机的内参矩阵;
12.步骤1.2:将相机固定在车上后,再拍摄一张照片,通过已知的内参矩阵进行标定即可得到这张图片的外参矩阵。
13.3.根据权利要求1所述测距方法,其特征在于,所述步骤4标定及计算距离具体为,
14.步骤4.1:利用训练好的yolov4模型行人进行检测并得到行人的像素坐标;
15.步骤4.2:将行人和相机的像素坐标分别通过标定转换为对应的世界坐标;
16.步骤4.3:求解相机和人在世界坐标系中的距离,即为车辆与行人间的距离。
17.本发明的有益效果是:
18.可以实时准确地检测到行人,并且得到行人的准确坐标,从而计算距离。本设计采用的opencv标定法可以随时进行重新标定,相比matlab标定便捷。利用此方法测距可以提醒司机减速刹车,有效减少或者避免发生车祸。
附图说明
19.图1为世界坐标系到像素坐标系的映射
20.图2为单目相机测距的流程图
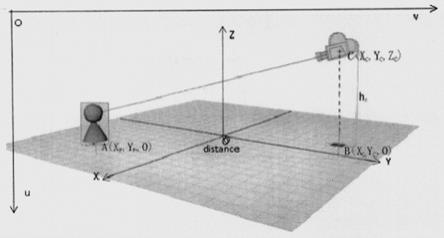
21.图3为车载相机与行人的测距模型图
具体实施方式
22.厂区作业车辆在正常行驶时容易与行人发生碰撞造成事故,因此,为了避免此类事故,在车上安装摄像头,通过其拍摄的视频实时计算车辆与行人的距离。车辆正常行驶时当其与行人距离减小至某一个阈值时,提醒司机做出相应操作或进行主动制动,以达到保护行人的目的。为了更清楚地说明本发明现有技术中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
23.步骤1:本设计在opencv下进行标定,像素坐标系点(u,v)与世界坐标系点(xw,yw,zw)的映射关系:
[0024][0025]
等号右侧的第一个矩阵即为相机的内参矩阵,第二个矩阵为外参矩阵,其中r和t分别为旋转矩阵和平移向量,利用海康威视的摄像头,从各个角度拍摄大约20张标定板的图片,输入到opencv进行标定,得到相机的内参矩阵和外参矩阵。
[0026]
步骤2:视频图像采集。拍摄车辆行驶过程中的多段视频,对其中有行人的视频片段进行抽帧以用于制作行人检测的数据集,图像标注采用labelimg,并制作voc格式的数据集。此外,视频还用于测试车辆行人距离测量。
[0027]
步骤3:算法模型训练与检测。本项目采用yolov4与yolo fastest两种算法分别进行训练和测试,先用手机拍摄行人的图像,用卷尺测量被测人与手机的距离,使用训练好的yolov4或yolo fastest检测行人,通过标定计算距离,得出两者的差异,从而验证本文中计算距离方法的准确度。yolo fastest更易于部署在硬件资源有限的嵌入式设备中。
[0028]
步骤4:标定计算坐标。首先在车上固定车载摄像头的位置与角度,将标定板水平放置于地面,使其位于摄像头视场中间位置,拍摄有标定板的照片用于相机标定;注意:标定以后摄像头相对于车辆的位置和角度便不能更改了,一旦更改则必须重新标定。通过上一节算法模型的训练与测试后,可以得到行人在图像上的像素坐标,以此作为标定的输入,经过标定计算即可得到行人在地面的世界坐标,同样可以通过标定程序计算摄像头在地面的投影点的世界坐标,将内参矩阵和外参矩阵相乘,并且令zw=0得到:
[0029][0030]
得到关于xw和yw的二元一次方程:
[0031][0032]
于是,可以通过像素坐标(u,v)及内外参矩阵得到地面(标定板平面)世界坐标系点(xw,yw,0),即二维平面映射二维平面的一个过程。
[0033]
进而计算它们之间的距离即可得到车辆与行人的实际距离,并将此距离标注于检测框上方。
技术特征:
1.一种基于车载单目摄像机的行人距离测量方法,其特征在于,所述测距方法包括以下步骤:步骤1:相机标定,得到相机的内参和外参;步骤2:视频图像采集并制作voc格式的数据集;步骤3:利用制作的数据集训练模型并测试;步骤4:通过标定计算车与行人的距离。2.根据权利要求1所述测距方法,其特征在于,所述步骤制作数据集具体为,步骤1.1:将标定板摆放在平地上,用相机多角度进行拍摄并得到20张左右照片,通过opencv标定即可得到相机的内参矩阵;步骤1.2:将相机固定在车上后,再拍摄一张照片,通过已知的内参矩阵进行标定即可得到这张图片的外参矩阵。3.根据权利要求1所述测距方法,其特征在于,所述步骤4具体为,步骤4.1:利用训练好的yolov4模型行人进行检测并得到行人的像素坐标;步骤4.2:将行人和相机的像素坐标分别通过标定转换为对应的世界坐标;步骤4.3:求解相机和人在世界坐标系中的距离,即为车辆与行人间的距离。
技术总结
本发明设计了一种基于车载单目摄像机的行人距离测量方法。车载相机行人距离测量的核心是对行人的准确检测,利用YOLOv4算法实时检测车辆前方道路环境中的行人,即可得到行人在像素坐标系中的位置,再将像素坐标系中行人和相机的像素坐标通过OpenCV标定转换为世界坐标系中行人和相机的世界坐标,并通过计算这两点之间的距离即可得到行人与汽车之间的距离。点之间的距离即可得到行人与汽车之间的距离。点之间的距离即可得到行人与汽车之间的距离。
技术研发人员:王以忠 易凯 周艳均
受保护的技术使用者:天津科技大学
技术研发日:2021.11.10
技术公布日:2022/1/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1