一种移动机器人及其定位方法与流程
1.本发明属于移动机器人,尤其涉及一种移动机器人及其定位方法。
背景技术:
2.基于激光雷达的移动机器人定位技术是当前商业移动机器人的主流技术,但它存在生产成本高、激光雷达彼此间信号干扰、内部机械结构容易磨损等缺点。
3.而基于单目摄像头的移动机器人定位技术是通过实时提取摄像头输出的rbg图像中的特征点,并与已保存的特征点地图进行比对从而得出位姿信息的技术,但是单目摄像头受到摄像头视场角的限制,在实际运行中不够稳定,使得不能够使用在商业场景中。
技术实现要素:
4.本发明实施例的目的在于提供一种移动机器人,旨在解决上述背景技术中提出的问题。
5.本发明实施例是这样实现的,一种移动机器人,所述机器人包括:至少两个摄像头,用于获取机器人的地点图像;存储器,用于保存特征点和关键帧地图;处理器,与摄像头相连,对摄像头获取的图像信息进行处理,并与存储器中特征点地图进行比对,用于确定机器人的位置。
6.本发明实施例的另一目的在于提供一种移动机器人的定位方法,所述定位方法包括以下步骤:1)通过至少两个摄像头获取rgb图像;2)将至少两张rgb图像拼接为一张360
°
全景图像;3)通过处理器提取全景图像中的orb特征点;4)将步骤3)中提取的特征点与存储器中的关键帧进行匹配;5)若能匹配到关键帧,则通过计算当前图像关键帧的空间关系输出机器人的位姿;若不能匹配到关键帧,则将图像作为新的关键帧并存入存储器。
7.本发明实施例提供的一种移动机器人,用至少两个摄像头的方法获取360度全景图像(equirectangularimage),与基于激光雷达的移动机器人定位技术相比,该移动机器人将制造与维护的成本大幅度降低,并且与基于单目摄像头的移动机器人定位技术相比,解决了容易丢失定位信息的问题,该移动机器人在移动过程中提供了更稳定的定位能力,使得纯视觉移动机器人的商业落地成为可能。
附图说明
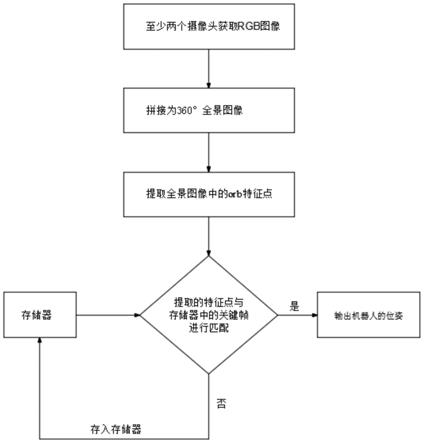
8.图1为本发明实施例提供的一种移动机器人定位方法的流程图。
具体实施方式
9.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
10.以下结合具体实施例对本发明的具体实现进行详细描述。
11.本发明的一个实施例提供的一种移动机器人,所述机器人包括:至少两个摄像头,用于获取机器人的地点图像;存储器,用于保存特征点和关键帧地图;处理器,与摄像头相连,对摄像头获取的图像信息进行处理,并与存储器中特征点地图进行比对,用于确定机器人的位置。
12.在本发明的一个实施例中,该机器人针对现有技术中基于激光雷达的移动机器人生产成本高、激光雷达彼此间信号干扰、内部机械结构容易磨损以及基于单目摄像头的移动机器人容易受到摄像头视场角的限制,在实际运行中不够稳定等问题,在移动机器人中设置了至少两个摄像头,与基于激光雷达的移动机器人定位技术相比,该移动机器人将制造与维护的成本大幅度降低,与基于单目摄像头的移动机器人定位技术相比,解决了容易丢失定位信息的问题,该移动机器人在移动过程中提供了更稳定的定位能力,使得纯视觉移动机器人的商业落地成为可能。
13.作为本发明的一种优选实施例,所述摄像头为鱼眼摄像头。
14.作为本发明的另一种优选实施例,所述鱼眼摄像头为360
°
全景摄像头。
15.用至少两个鱼眼摄像头的方法获取360度全景图像,解决了传统单摄像头定位方法容易丢失定位信息的问题。
16.如图1所示,本发明实施例还提供的一种移动机器人的定位方法,所述定位方法包括以下步骤:1)通过至少两个摄像头获取rgb图像;2)将至少两张rgb图像拼接为一张360
°
全景图像;3)通过处理器提取全景图像中的orb特征点;4)将步骤3)中提取的特征点与存储器中的关键帧进行匹配;5)若能匹配到关键帧,则通过计算当前图像关键帧的空间关系输出机器人的位姿;若不能匹配到关键帧,则将图像作为新的关键帧并存入存储器。
17.具体在进行定位时,首先将获取的rgb图像拼接为一张360
°
全景图像,并提取出图像中的orb特征点,将提取出的特征点与存储器中预先保存的关键帧进行匹配,一旦能匹配到相同的关键帧,即可判断出移动机器人的位置,进而实现定位,为移动机器人的移动提供基础,如果没有匹配到关键帧,则存在存储器,作为新的补充数据,因此该移动机器人的存储器也是在不断更新的,用以适应不同的地点。
18.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种移动机器人,其特征在于,所述机器人包括:至少两个摄像头,用于获取机器人的地点图像;存储器,用于保存特征点和关键帧地图;处理器,与摄像头相连,对摄像头获取的图像信息进行处理,并与存储器中特征点地图进行比对,用于确定机器人的位置。2.根据权利要求1所述的移动机器人,其特征在于,所述摄像头为鱼眼摄像头。3.根据权利要求2所述的移动机器人,其特征在于,所述鱼眼摄像头为360
°
全景摄像头。4.根据权利要求1所述的移动机器人,其特征在于,所述特征点地图由连续的关键帧组成。5.一种如权利要求4所述的移动机器人的定位方法,其特征在于,所述定位方法包括以下步骤:1)通过至少两个摄像头获取rgb图像;2)将至少两张rgb图像拼接为一张360
°
全景图像;3)通过处理器提取全景图像中的orb特征点;4)将步骤3)中提取的特征点与存储器中的关键帧进行匹配;5)若能匹配到关键帧,则通过计算当前图像关键帧的空间关系输出机器人的位姿;若不能匹配到关键帧,则将图像作为新的关键帧并存入存储器。
技术总结
本发明适用于移动机器人,提供了一种移动机器人,所述机器人包括:至少两个摄像头,用于获取机器人的地点图像;存储器,用于保存特征点和关键帧地图;处理器,与摄像头相连,对摄像头获取的图像信息进行处理,并与存储器中特征点地图进行比对,用于确定机器人的位置。本发明还提供一种移动机器人的定位方法,包括:通过至少两个摄像头获取RGB图像;将至少两张RGB图像拼接为一张360
技术研发人员:林铮
受保护的技术使用者:林铮
技术研发日:2021.11.12
技术公布日:2022/2/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1