一种伴随关系确定方法及装置与流程
本申请涉及大数据处理领域,并且更具体地,涉及一种伴随关系确定方法及装置。
背景技术:
1、目前,伴随关系的发现具有广泛的应用场景。基于伴随关系可以发现团队新成员。
2、现有的伴随关系确定方法,是基于图像识别的方法。其发现伴随关系的过程为:根据视频图像数据对目标进行持续分析,通过持续分析发现两个目标之间的伴随关系。一方面,上述方法容易出现较大误差,例如,由于天气或光线不佳(尤其是在夜间),会导致图像识别不准确,进而导致伴随关系确定不准确。再例如,在被拍摄的目标被遮挡的情况下,无法根据视频图像进行识别、匹配。另一方面,上述方法需要进行全量数据的匹配,计算量较大。
技术实现思路
1、本申请提供了一种伴随关系确定方法及装置,以克服现有技术中存在的问题。
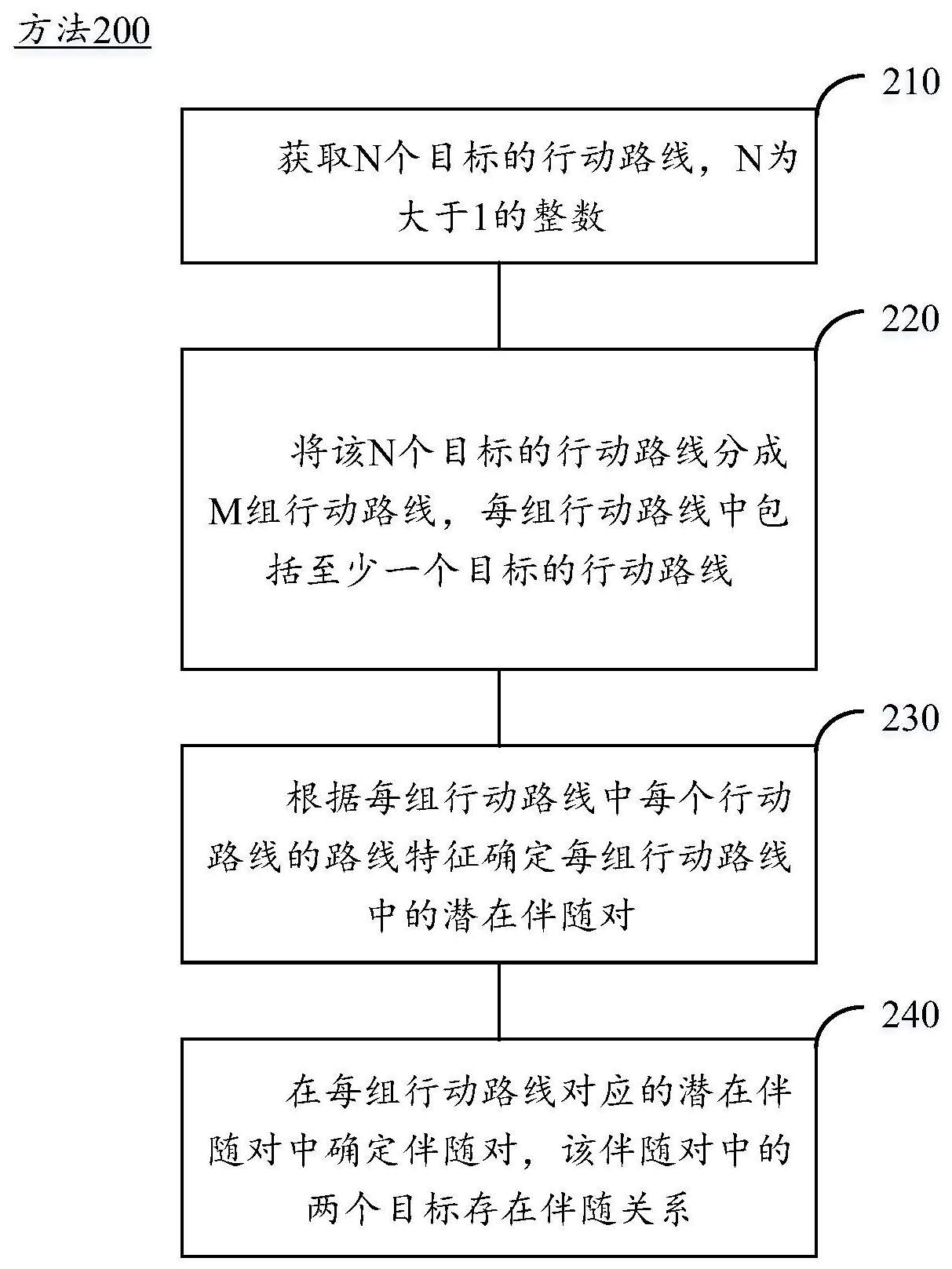
2、本申请第一方面提供一种伴随关系确定方法。所述方法包括获取多个目标的行动路线;从所述多个目标的行动路线中获取行动路线组,所述行动路线组中包括至少两个目标的行动路线;根据所述行动路线组中每个目标的行动路线特征,确定所述行动路线组中的潜在伴随对,所述潜在伴随对包括两个目标的行动路线;当所述潜在伴随对中的两个目标的行动路线满足预设条件时,确定所述潜在伴随对为伴随对。
3、采用上述方法,可以根据目标的行动路线确定伴随对,不需要对目标的图像数据进行处理,从而提高了伴随对确定的准确性,并提高了识别效率。
4、在一种实现方式中,所述预设条件为所述潜在伴随对中的两个目标的行动路线的相似度大于预设值。
5、基于行动路线的相似度确定在潜在伴随对中确定伴随对,可以更准确的识别伴随对。
6、在一种实现方式中,判断所述两个目标的行动路线的相似度大于预设值的方法包括基于空间距离的相似性分析方法,或,基于点数的相似性分析方法。
7、在一种实现方式中,所述目标的行动路线特征包括以下特征中的任意一种或多种:所述目标的行动路线中包括的行动点的个数、所述目标的行动路线对应的地块编号、所述目标的行动路线的方向、或根据所述行动路线确定的所述目标的速度。
8、在一种实现方式中,所述潜在伴随对中的两个目标的行动路线满足以下条件的任意一种或多种:
9、所述两个目标的行动路线中行动点的数量的差值小于第一阈值;
10、所述两个目标的行动路线具有相同的地块编号;
11、所述两个目标的行动路线方向夹角小于第二阈值;
12、根据所述两个目标的行动路线确定的两个目标的平均速度差与两个目标的平均速度中的较小值的比值小于第三阈值;或者,
13、根据所述两个目标的行动路线确定的两个目标的速度区间有交集。
14、本申请第二方面提供一种伴随关系确定装置。所述装置包括数据获取模块和数据分析模块。所述数据获取模块用于获取多个目标的行动路线。所述数据分析模块用于从所述多个目标的行动路线中获取行动路线组,所述行动路线组中包括至少两个目标的行动路线,根据所述行动路线组中每个目标的行动路线特征,确定所述行动路线组中的潜在伴随对,所述潜在伴随对包括两个目标的行动路线;当所述潜在伴随对中的两个目标的行动路线满足预设条件时,确定所述潜在伴随对为伴随对。
15、采用上述装置,可以根据目标的行动路线确定伴随对,不需要对目标的图像数据进行处理,从而提高了伴随对确定的准确性,并提高了识别效率。
16、在一种实现方式中,所述预设条件为所述潜在伴随对中的两个目标的行动路线的相似度大于预设值。
17、基于行动路线的相似度确定在潜在伴随对中确定伴随对,可以更准确的识别伴随对。
18、在一种实现方式中,判断所述两个目标的行动路线的相似度大于预设值的方法包括基于空间距离的相似性分析方法,或,基于点数的相似性分析方法。
19、在一种实现方式中,所述目标的行动路线特征包括以下特征中的任意一种或多种:所述目标的行动路线中包括的行动点的个数、所述目标的行动路线对应的地块编号、所述目标的行动路线的方向、根据所述行动路线确定的所述目标的速度。
20、在一种实现方式中,所述潜在伴随对中的两个目标的行动路线满足以下条件的任意一种或多种:
21、所述两个目标的行动路线中行动点的数量的差值小于第一阈值;
22、所述两个目标的行动路线具有相同的地块编号;
23、所述两个目标的行动路线方向夹角小于第二阈值;
24、根据所述两个目标的行动路线确定的两个目标的平均速度差与两个目标的平均速度中的较小值的比值小于第三阈值;或者,
25、根据所述两个目标的行动路线确定的两个目标的速度区间有交集。
26、本申请第三方面提供一种电子装置,所述电子装置包括处理器和存储器,所述存储器用于存储指令,所述处理器用于读取所述存储器中存储的指令,以执行第一方面提供的任意一项方法。
27、本申请第四方面提供一种计算机可读存储介质,包括计算机程序,当所述计算机程序在计算机上运行时,所述计算机执行第一方面提供的任意一项方法。
28、本申请第五方面提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行第一方面提供的任意一项方法。
29、第六方面,提供了一种芯片,包括至少一个处理器和接口;所述至少一个所述处理器,用于调用并运行计算机程序,以使所述芯片执行第一方面提供的任意一项方法。
技术特征:
1.一种伴随关系确定方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述预设条件为所述潜在伴随对中的两个目标的行动路线的相似度大于预设值。
3.根据权利要求2所述的方法,其特征在于,判断所述两个目标的行动路线的相似度大于预设值的方法包括基于空间距离的相似性分析方法,或,基于点数的相似性分析方法。
4.根据权利要求1至3任意一项所述的方法,其特征在于,所述目标的行动路线特征包括以下特征中的任意一种或多种:所述目标的行动路线中包括的行动点的个数、所述目标的行动路线对应的地块编号、所述目标的行动路线的方向、或根据所述行动路线确定的所述目标的速度。
5.根据权利要求1至4中任一项所述的方法,其特征在于,所述潜在伴随对中的两个目标的行动路线满足以下条件的任意一种或多种:
6.一种伴随关系确定装置,其特征在于,所述装置包括:
7.根据权利要求6所述的装置,其特征在于,所述预设条件为所述潜在伴随对中的两个目标的行动路线的相似度大于预设值。
8.根据权利要求7所述的装置,其特征在于,判断所述两个目标的行动路线的相似度大于预设值的方法包括基于空间距离的相似性分析方法,或,基于点数的相似性分析方法。
9.根据权利要求6至8任意一项所述的装置,其特征在于,所述目标的行动路线特征包括以下特征中的任意一种或多种:所述目标的行动路线中包括的行动点的个数、所述目标的行动路线对应的地块编号、所述目标的行动路线的方向、根据所述行动路线确定的所述目标的速度。
10.根据权利要求6至9中任一项所述的装置,其特征在于,所述潜在伴随对中的两个目标的行动路线满足以下条件的任意一种或多种:
11.一种电子装置,包括处理器和存储器,所述存储器用于存储指令,所述处理器用于读取所述存储器中存储的指令,以执行权利要求1至5中任一项所述的方法。
12.一种计算机可读存储介质,包括计算机程序,当所述计算机程序在计算机上运行时,所述计算机执行权利要求1至5中任一项所述的方法。
技术总结
本申请提供了一种伴随关系确定方法及装置。所述伴随关系确定方法包括:获取多个目标的行动路线;从所述多个目标的行动路线中获取行动路线组,所述行动路线组中包括至少两个目标的行动路线;根据所述行动路线组中每个目标的行动路线特征,确定所述行动路线组中的潜在伴随对,所述潜在伴随对包括两个目标的行动路线;当所述潜在伴随对中的两个目标的行动路线满足预设条件时,确定所述潜在伴随对为具有伴随关系的伴随对。采用本申请提供的方法,根据目标的行动路线确定具有伴随关系的伴随对,可以更加准确的识别出具有伴随关系的伴随对,而且可以提高识别效率。
技术研发人员:徐宸,贾佳峰,余思,曹莉,王工艺,李君伟
受保护的技术使用者:华为技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!